slam之使用realsense T265得到深度图
使用realsense T265得到深度图
研究realsense 的github发现了其在librealsense中已经放好了wrapper,该wrapper中的python部分已经做好了使用T265获得深度图的例程:t265_stereo.py,下面给出获得深度图的过程。
所需条件
系统为ubuntu16.04,需要realsenseT265相机,python3,opencv(这里默认大家安装好了realsense的SDK,如果未安装,可以查看https://blog.csdn.net/weixin_44386661/article/details/100699985)
首先配置环境(一步步的来)
1.安装python3的虚拟环境支持
apt-get install python3-venv
2.创建一个虚拟环境
python3 -m venv py3librs
3. 进入虚拟环境
source py3librs/bin/activate
4. 安装python虚拟环境下的opencv(这个不大,很快就下载完成)
pip install opencv-python
5.安装pyrealsense2
pip install pyrealsense2
获取深度图
重新开启一个终端
1.进入虚拟环境
source py3librs/bin/activate
2.获取深度图
python3 t265_stereo.py
这里可能会报错如下:

这是由于安装了ROS导致系统会默认去找ros中的python的cv2库
所以我们需要在.bashrc中自己设置python3.5中库的路径,
首先在一个终端输入:
sudo gedit .bashrc
然后在.bashrc文件的最后一行加入:
export PYTHONPATH="/home/wyt/py3librs/lib/python3.5/site-packages":$PYTHONPATH
这里的路径需要自己去查,每个人的都不一样.只要找到自己的py3librs/lib/python3.5/site-packages的路径,替换掉我的那个即可.
最后可得到深度图如下:
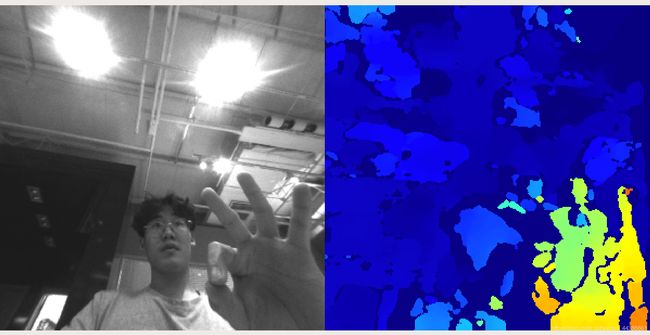 将t265_stereo.py保存到home下即可,也可以随便改名字.
将t265_stereo.py保存到home下即可,也可以随便改名字.
t265_stereo的程序如下:
#!/usr/bin/python
# -*- coding: utf-8 -*-
## License: Apache 2.0. See LICENSE file in root directory.
## Copyright(c) 2019 Intel Corporation. All Rights Reserved.
# Python 2/3 compatibility
from __future__ import print_function
"""
This example shows how to use T265 intrinsics and extrinsics in OpenCV to
asynchronously compute depth maps from T265 fisheye images on the host.
T265 is not a depth camera and the quality of passive-only depth options will
always be limited compared to (e.g.) the D4XX series cameras. However, T265 does
have two global shutter cameras in a stereo configuration, and in this example
we show how to set up OpenCV to undistort the images and compute stereo depth
from them.
Getting started with python3, OpenCV and T265 on Ubuntu 16.04:
First, set up the virtual enviroment:
$ apt-get install python3-venv # install python3 built in venv support
$ python3 -m venv py3librs # create a virtual environment in pylibrs
$ source py3librs/bin/activate # activate the venv, do this from every terminal
$ pip install opencv-python # install opencv 4.1 in the venv
$ pip install pyrealsense2 # install librealsense python bindings
Then, for every new terminal:
$ source py3librs/bin/activate # Activate the virtual environment
$ python3 t265_stereo.py # Run the example
"""
# First import the library
import pyrealsense2 as rs
# Import OpenCV and numpy
import cv2
import numpy as np
from math import tan, pi
"""
In this section, we will set up the functions that will translate the camera
intrinsics and extrinsics from librealsense into parameters that can be used
with OpenCV.
The T265 uses very wide angle lenses, so the distortion is modeled using a four
parameter distortion model known as Kanalla-Brandt. OpenCV supports this
distortion model in their "fisheye" module, more details can be found here:
https://docs.opencv.org/3.4/db/d58/group__calib3d__fisheye.html
"""
"""
Returns R, T transform from src to dst
"""
def get_extrinsics(src, dst):
extrinsics = src.get_extrinsics_to(dst)
R = np.reshape(extrinsics.rotation, [3,3]).T
T = np.array(extrinsics.translation)
return (R, T)
"""
Returns a camera matrix K from librealsense intrinsics
"""
def camera_matrix(intrinsics):
return np.array([[intrinsics.fx, 0, intrinsics.ppx],
[ 0, intrinsics.fy, intrinsics.ppy],
[ 0, 0, 1]])
"""
Returns the fisheye distortion from librealsense intrinsics
"""
def fisheye_distortion(intrinsics):
return np.array(intrinsics.coeffs[:4])
# Set up a mutex to share data between threads
from threading import Lock
frame_mutex = Lock()
frame_data = {"left" : None,
"right" : None,
"timestamp_ms" : None
}
"""
This callback is called on a separate thread, so we must use a mutex
to ensure that data is synchronized properly. We should also be
careful not to do much work on this thread to avoid data backing up in the
callback queue.
"""
def callback(frame):
global frame_data
if frame.is_frameset():
frameset = frame.as_frameset()
f1 = frameset.get_fisheye_frame(1).as_video_frame()
f2 = frameset.get_fisheye_frame(2).as_video_frame()
left_data = np.asanyarray(f1.get_data())
right_data = np.asanyarray(f2.get_data())
ts = frameset.get_timestamp()
frame_mutex.acquire()
frame_data["left"] = left_data
frame_data["right"] = right_data
frame_data["timestamp_ms"] = ts
frame_mutex.release()
# Declare RealSense pipeline, encapsulating the actual device and sensors
pipe = rs.pipeline()
# Build config object and stream everything
cfg = rs.config()
# Start streaming with our callback
pipe.start(cfg, callback)
try:
# Set up an OpenCV window to visualize the results
WINDOW_TITLE = 'Realsense'
cv2.namedWindow(WINDOW_TITLE, cv2.WINDOW_NORMAL)
# Configure the OpenCV stereo algorithm. See
# https://docs.opencv.org/3.4/d2/d85/classcv_1_1StereoSGBM.html for a
# description of the parameters
window_size = 5
min_disp = 0
# must be divisible by 16
num_disp = 112 - min_disp
max_disp = min_disp + num_disp
stereo = cv2.StereoSGBM_create(minDisparity = min_disp,
numDisparities = num_disp,
blockSize = 16,
P1 = 8*3*window_size**2,
P2 = 32*3*window_size**2,
disp12MaxDiff = 1,
uniquenessRatio = 10,
speckleWindowSize = 100,
speckleRange = 32)
# Retreive the stream and intrinsic properties for both cameras
profiles = pipe.get_active_profile()
streams = {"left" : profiles.get_stream(rs.stream.fisheye, 1).as_video_stream_profile(),
"right" : profiles.get_stream(rs.stream.fisheye, 2).as_video_stream_profile()}
intrinsics = {"left" : streams["left"].get_intrinsics(),
"right" : streams["right"].get_intrinsics()}
# Print information about both cameras
print("Left camera:", intrinsics["left"])
print("Right camera:", intrinsics["right"])
# Translate the intrinsics from librealsense into OpenCV
K_left = camera_matrix(intrinsics["left"])
D_left = fisheye_distortion(intrinsics["left"])
K_right = camera_matrix(intrinsics["right"])
D_right = fisheye_distortion(intrinsics["right"])
(width, height) = (intrinsics["left"].width, intrinsics["left"].height)
# Get the relative extrinsics between the left and right camera
(R, T) = get_extrinsics(streams["left"], streams["right"])
# We need to determine what focal length our undistorted images should have
# in order to set up the camera matrices for initUndistortRectifyMap. We
# could use stereoRectify, but here we show how to derive these projection
# matrices from the calibration and a desired height and field of view
# We calculate the undistorted focal length:
#
# h
# -----------------
# \ | /
# \ | f /
# \ | /
# \ fov /
# \|/
stereo_fov_rad = 90 * (pi/180) # 90 degree desired fov
stereo_height_px = 300 # 300x300 pixel stereo output
stereo_focal_px = stereo_height_px/2 / tan(stereo_fov_rad/2)
# We set the left rotation to identity and the right rotation
# the rotation between the cameras
R_left = np.eye(3)
R_right = R
# The stereo algorithm needs max_disp extra pixels in order to produce valid
# disparity on the desired output region. This changes the width, but the
# center of projection should be on the center of the cropped image
stereo_width_px = stereo_height_px + max_disp
stereo_size = (stereo_width_px, stereo_height_px)
stereo_cx = (stereo_height_px - 1)/2 + max_disp
stereo_cy = (stereo_height_px - 1)/2
# Construct the left and right projection matrices, the only difference is
# that the right projection matrix should have a shift along the x axis of
# baseline*focal_length
P_left = np.array([[stereo_focal_px, 0, stereo_cx, 0],
[0, stereo_focal_px, stereo_cy, 0],
[0, 0, 1, 0]])
P_right = P_left.copy()
P_right[0][3] = T[0]*stereo_focal_px
# Construct Q for use with cv2.reprojectImageTo3D. Subtract max_disp from x
# since we will crop the disparity later
Q = np.array([[1, 0, 0, -(stereo_cx - max_disp)],
[0, 1, 0, -stereo_cy],
[0, 0, 0, stereo_focal_px],
[0, 0, -1/T[0], 0]])
# Create an undistortion map for the left and right camera which applies the
# rectification and undoes the camera distortion. This only has to be done
# once
m1type = cv2.CV_32FC1
(lm1, lm2) = cv2.fisheye.initUndistortRectifyMap(K_left, D_left, R_left, P_left, stereo_size, m1type)
(rm1, rm2) = cv2.fisheye.initUndistortRectifyMap(K_right, D_right, R_right, P_right, stereo_size, m1type)
undistort_rectify = {"left" : (lm1, lm2),
"right" : (rm1, rm2)}
mode = "stack"
while True:
# Check if the camera has acquired any frames
frame_mutex.acquire()
valid = frame_data["timestamp_ms"] is not None
frame_mutex.release()
# If frames are ready to process
if valid:
# Hold the mutex only long enough to copy the stereo frames
frame_mutex.acquire()
frame_copy = {"left" : frame_data["left"].copy(),
"right" : frame_data["right"].copy()}
frame_mutex.release()
# Undistort and crop the center of the frames
center_undistorted = {"left" : cv2.remap(src = frame_copy["left"],
map1 = undistort_rectify["left"][0],
map2 = undistort_rectify["left"][1],
interpolation = cv2.INTER_LINEAR),
"right" : cv2.remap(src = frame_copy["right"],
map1 = undistort_rectify["right"][0],
map2 = undistort_rectify["right"][1],
interpolation = cv2.INTER_LINEAR)}
# compute the disparity on the center of the frames and convert it to a pixel disparity (divide by DISP_SCALE=16)
disparity = stereo.compute(center_undistorted["left"], center_undistorted["right"]).astype(np.float32) / 16.0
# re-crop just the valid part of the disparity
disparity = disparity[:,max_disp:]
# convert disparity to 0-255 and color it
disp_vis = 255*(disparity - min_disp)/ num_disp
disp_color = cv2.applyColorMap(cv2.convertScaleAbs(disp_vis,1), cv2.COLORMAP_JET)
color_image = cv2.cvtColor(center_undistorted["left"][:,max_disp:], cv2.COLOR_GRAY2RGB)
if mode == "stack":
cv2.imshow(WINDOW_TITLE, np.hstack((color_image, disp_color)))
if mode == "overlay":
ind = disparity >= min_disp
color_image[ind, 0] = disp_color[ind, 0]
color_image[ind, 1] = disp_color[ind, 1]
color_image[ind, 2] = disp_color[ind, 2]
cv2.imshow(WINDOW_TITLE, color_image)
key = cv2.waitKey(1)
if key == ord('s'): mode = "stack"
if key == ord('o'): mode = "overlay"
if key == ord('q') or cv2.getWindowProperty(WINDOW_TITLE, cv2.WND_PROP_VISIBLE) < 1:
break
finally:
pipe.stop()