好像还挺好玩的GAN7——CycleGAN实现图像风格转换
好像还挺好玩的GAN7——CycleGAN实现图像风格转换
- 学习前言
- 什么是CycleGAN
- keras_contrib库的Windows安装
- 代码与训练数据的下载
- 神经网络构建
- 1、Generator
- 2、Discriminator
- 训练思路
- 实现全部代码
- 1、网络部分全部代码
- 2、data_loader全部代码
- 3、主函数全部代码
- 实现效果:
学习前言
CycleGAN好像可以换皮肤,有必要了解一下。

什么是CycleGAN
CycleGAN是一种完成图像到图像的转换的一种GAN。
图像到图像的转换是一类视觉和图形问题,其目标是获得输入图像和输出图像之间的映射。
但是,对于许多任务,配对的训练数据将不可用。
CycleGAN提出了一种在没有成对例子的情况下学习将图像从源域X转换到目标域Y的方法。
keras_contrib库的Windows安装
由于CycleGAN要用到InstanceNormalization,这个函数在普通的keras内不存在,所以要安装一个新的库。
首先去github上下载https://github.com/keras-team/keras-contrib库,下载完后解压。
下载完成后利用cmd进入该文件夹,并利用python setup.py install进行安装。
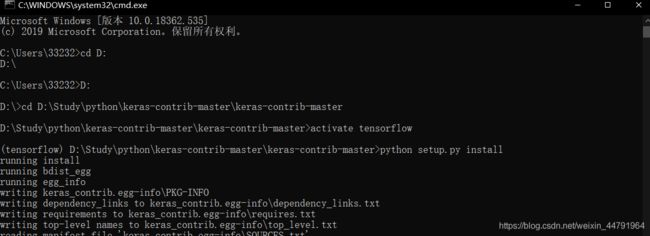
安装完成后发现其实python库里面还是没有InstanceNormalization,于是我们需要把
![]()
这两个文件,移动到anaconda的环境中,具体要放到Lib下的site-packages中。

这样InstanceNormalization就可以正常使用了!
代码与训练数据的下载
这是我的github连接,代码可以在上面下载:
https://github.com/bubbliiiing/GAN-keras
这是斑马to黄种马的数据集下载:
https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/horse2zebra.zip
苹果to橘子数据集下载:
https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/apple2orange.zip
画作to照片数据集下载:
https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/monet2photo.zip
神经网络构建
1、Generator
生成网络的目标是:
输入一张图片,转化成自己期望的风格的那张图片。
就好像输入斑马,转化成一匹马。

输入一幅画作,转化成一张风景照片。

因此对于CycleGAN而言,它的输入是一张图像,输出也是一张图像。
这样的结构与我们所学过的语义分割的形式非常类似,因此需要先进行下采样后再进行上采样!
本文章的网络结构采用的与论文中的相同。
import keras
from keras.models import *
from keras.layers import *
from keras import layers
import keras.backend as K
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
IMAGE_ORDERING = 'channels_last'
def one_side_pad( x ):
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
if IMAGE_ORDERING == 'channels_first':
x = Lambda(lambda x : x[: , : , :-1 , :-1 ] )(x)
elif IMAGE_ORDERING == 'channels_last':
x = Lambda(lambda x : x[: , :-1 , :-1 , : ] )(x)
return x
def identity_block(input_tensor, kernel_size, filter_num, block):
conv_name_base = 'res' + block + '_branch'
in_name_base = 'in' + block + '_branch'
# 1x1压缩
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(input_tensor)
x = Conv2D(filter_num, (3, 3) , data_format=IMAGE_ORDERING , name=conv_name_base + '2a')(x)
x = InstanceNormalization(axis=3,name=in_name_base + '2a')(x)
x = Activation('relu')(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(filter_num , (3, 3), data_format=IMAGE_ORDERING , name=conv_name_base + '2c')(x)
x = InstanceNormalization(axis=3,name=in_name_base + '2c')(x)
# 残差网络
x = layers.add([x, input_tensor])
x = Activation('relu')(x)
return x
def get_resnet(input_height, input_width, channel):
img_input = Input(shape=(input_height,input_width , 3 ))
x = ZeroPadding2D((3, 3), data_format=IMAGE_ORDERING)(img_input)
x = Conv2D(64, (7, 7), data_format=IMAGE_ORDERING)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
# 下采样
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(128, (3, 3), data_format=IMAGE_ORDERING, strides=2)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(256, (3, 3), data_format=IMAGE_ORDERING, strides=2)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
# 原论文中这个残差部分进行了9次,但是我的1660ti+6gb因为显存跑不起来
# 于是我改成了6次
# Keras比较吃显存,pytorch版本的可以跑。
for i in range(6):
x = identity_block(x, 3, 256, block=str(i))
# 上采样
x = ( UpSampling2D( (2,2), data_format=IMAGE_ORDERING))(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(128, (3, 3), data_format=IMAGE_ORDERING)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ( UpSampling2D( (2,2), data_format=IMAGE_ORDERING))(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(64, (3, 3), data_format=IMAGE_ORDERING)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ZeroPadding2D((3, 3), data_format=IMAGE_ORDERING)(x)
x = Conv2D(channel, (7, 7), data_format=IMAGE_ORDERING)(x)
x = Activation('tanh')(x)
model = Model(img_input,x)
return model
2、Discriminator
判别模型的目的是根据输入的图片判断出真伪。
在CycleGAN中,Dicriminator的训练的loss函数使用的是LSGAN中所提到均方差,这种loss可以提高假图像的精度。
在这里最后卷积完后的shape为(16,16,1)。
普通判别模型是全连接到一个1维向量上,而这里却不是,要怎么理解呢?
可以这样去感性理解这个操作:
一共有16x16个评委对这个图片进行判断,这其中可能有些评委判断错了,有些评委判断对了,根据每个评委判断的内容可以对判别模型进行修正

def build_discriminator(self):
def conv2d(layer_input, filters, f_size=4, normalization=True):
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
if normalization:
d = InstanceNormalization()(d)
d = LeakyReLU(alpha=0.2)(d)
return d
img = Input(shape=self.img_shape)
d1 = conv2d(img, 64, normalization=False)
d2 = conv2d(d1, 128)
d3 = conv2d(d2, 256)
d4 = conv2d(d3, 512)
# 对每个像素点判断是否有效
validity = Conv2D(1, kernel_size=3, strides=1, padding='same')(d4)
return Model(img, validity)
训练思路
CycleGAN的训练思路分为如下几个步骤:
1、创建两个生成模型,一个用于从图片风格A转换成图片风格B,一个用于从图片风格B转换成图片风格A。
2、创建两个判别模型,分别用于风格A图片的真伪判断和风格B图片的真伪判断。
3、判别模型的训练所用的损失函数与LSGAN相同,通过判断是否正确进行训练。
4、生成模型的训练需要满足下面六个准则:
- a、从图片风格A转换成图片风格B的假图像需要成功欺骗判断模型B;
- b、从图片风格B转换成图片风格A的假图像需要成功欺骗判断模型A;
- c、从图片风格A转换成图片风格B的假图像可以通过生成模型BA成功转换成图片A;
- d、从图片风格B转换成图片风格A的假图像可以通过生成模型AB成功转换成图片B;
- e、真实图片A通过生成模型BA,不会发生变化。
- f、真实图片B通过生成模型AB,不会发生变化。
其中c、d准则是为了让生成器找到最需要修改的地方,比如 斑马转黄马就只要改变马的颜色就可以欺骗判断模型,风格A的图片经过生成模型AB只需要转化 斑马 即可。
其中e、f准则是为了让 两种生成模型可以区分两种图片风格,生成模型AB只对风格A的图片进行处理,生成模型BA只对风格B的图片进行处理。
实现全部代码
1、网络部分全部代码
用于存放网络:
import keras
from keras.models import *
from keras.layers import *
from keras import layers
import keras.backend as K
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
IMAGE_ORDERING = 'channels_last'
def one_side_pad( x ):
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
if IMAGE_ORDERING == 'channels_first':
x = Lambda(lambda x : x[: , : , :-1 , :-1 ] )(x)
elif IMAGE_ORDERING == 'channels_last':
x = Lambda(lambda x : x[: , :-1 , :-1 , : ] )(x)
return x
def identity_block(input_tensor, kernel_size, filter_num, block):
conv_name_base = 'res' + block + '_branch'
in_name_base = 'in' + block + '_branch'
# 1x1压缩
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(input_tensor)
x = Conv2D(filter_num, (3, 3) , data_format=IMAGE_ORDERING , name=conv_name_base + '2a')(x)
x = InstanceNormalization(axis=3,name=in_name_base + '2a')(x)
x = Activation('relu')(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(filter_num , (3, 3), data_format=IMAGE_ORDERING , name=conv_name_base + '2c')(x)
x = InstanceNormalization(axis=3,name=in_name_base + '2c')(x)
# 残差网络
x = layers.add([x, input_tensor])
x = Activation('relu')(x)
return x
def get_resnet(input_height, input_width, channel):
img_input = Input(shape=(input_height,input_width , 3 ))
x = ZeroPadding2D((3, 3), data_format=IMAGE_ORDERING)(img_input)
x = Conv2D(64, (7, 7), data_format=IMAGE_ORDERING)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(128, (3, 3), data_format=IMAGE_ORDERING, strides=2)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(256, (3, 3), data_format=IMAGE_ORDERING, strides=2)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
for i in range(6):
x = identity_block(x, 3, 256, block=str(i))
x = ( UpSampling2D( (2,2), data_format=IMAGE_ORDERING))(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(128, (3, 3), data_format=IMAGE_ORDERING)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ( UpSampling2D( (2,2), data_format=IMAGE_ORDERING))(x)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING)(x)
x = Conv2D(64, (3, 3), data_format=IMAGE_ORDERING)(x)
x = InstanceNormalization(axis=3)(x)
x = Activation('relu')(x)
x = ZeroPadding2D((3, 3), data_format=IMAGE_ORDERING)(x)
x = Conv2D(channel, (7, 7), data_format=IMAGE_ORDERING)(x)
x = Activation('tanh')(x)
model = Model(img_input,x)
return model
2、data_loader全部代码
该部分用于对数据进行加载:
import cv2
from glob import glob
import numpy as np
class DataLoader():
def __init__(self, dataset_name, img_res=(128, 128)):
self.dataset_name = dataset_name
self.img_res = img_res
def load_data(self, domain, batch_size=1, is_testing=False):
data_type = "train%s" % domain if not is_testing else "test%s" % domain
path = glob('./datasets/%s/%s/*' % (self.dataset_name, data_type))
batch_images = np.random.choice(path, size=batch_size)
imgs = []
for img_path in batch_images:
img = self.imread(img_path)
if not is_testing:
img = cv2.resize(img, self.img_res)
if np.random.random() > 0.5:
img = np.fliplr(img)
else:
img = cv2.resize(img, self.img_res)
imgs.append(img)
imgs = np.array(imgs)/127.5 - 1.
return imgs
def load_batch(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "val"
path_A = glob('./datasets/%s/%sA/*' % (self.dataset_name, data_type))
path_B = glob('./datasets/%s/%sB/*' % (self.dataset_name, data_type))
self.n_batches = int(min(len(path_A), len(path_B)) / batch_size)
total_samples = self.n_batches * batch_size
path_A = np.random.choice(path_A, total_samples, replace=False)
path_B = np.random.choice(path_B, total_samples, replace=False)
for i in range(self.n_batches-1):
batch_A = path_A[i*batch_size:(i+1)*batch_size]
batch_B = path_B[i*batch_size:(i+1)*batch_size]
imgs_A, imgs_B = [], []
for img_A, img_B in zip(batch_A, batch_B):
img_A = self.imread(img_A)
img_B = self.imread(img_B)
img_A = cv2.resize(img_A, self.img_res)
img_B = cv2.resize(img_B, self.img_res)
if not is_testing and np.random.random() > 0.5:
img_A = np.fliplr(img_A)
img_B = np.fliplr(img_B)
imgs_A.append(img_A)
imgs_B.append(img_B)
imgs_A = np.array(imgs_A,dtype=np.float32)/127.5 - 1.
imgs_B = np.array(imgs_B,dtype=np.float32)/127.5 - 1.
yield imgs_A, imgs_B
def load_img(self, path):
img = self.imread(path)
img = img = cv2.resize(img, self.img_res)
img = img/127.5 - 1.
return img[np.newaxis, :, :, :]
def imread(self, path):
img = cv2.imread(path)
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
return img
3、主函数全部代码
训练代码
from __future__ import print_function, division
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers.advanced_activations import LeakyReLU
from keras.backend.tensorflow_backend import set_session
from keras.optimizers import Adam
from keras import backend as K
from keras.layers import *
from keras.models import *
import keras
from nets.resnet import get_resnet
from data_loader import DataLoader
import matplotlib.pyplot as plt
import tensorflow as tf
import numpy as np
import datetime
import sys
import os
class CycleGAN():
def __init__(self):
config = tf.ConfigProto()
config.gpu_options.allocator_type = 'BFC' #A "Best-fit with coalescing" algorithm, simplified from a version of dlmalloc.
config.gpu_options.per_process_gpu_memory_fraction = 0.7
config.gpu_options.allow_growth = True
set_session(tf.Session(config=config))
# 输入图片的大小为256x256x3
self.img_rows = 256
self.img_cols = 256
self.channels = 3
self.img_shape = (self.img_rows, self.img_cols, self.channels)
# 载入数据
self.dataset_name = 'horse2zebra'
self.data_loader = DataLoader(dataset_name=self.dataset_name,
img_res=(self.img_rows, self.img_cols))
# patch
patch = int(self.img_rows / 2**4)
self.disc_patch = (patch, patch, 1)
# Loss weights
self.lambda_cycle = 5
self.lambda_id = 2.5
optimizer = Adam(0.0002, 0.5)
#-------------------------#
# 建立判别网络
#-------------------------#
self.d_A = self.build_discriminator()
self.d_B = self.build_discriminator()
self.d_A.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
self.d_B.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
#-------------------------#
# 创建生成模型
#-------------------------#
# 创建生成模型
self.g_AB = self.build_generator()
self.g_BA = self.build_generator()
img_A = Input(shape=self.img_shape)
img_B = Input(shape=self.img_shape)
# 生成假的B图片
fake_B = self.g_AB(img_A)
# 生成假的A图片
fake_A = self.g_BA(img_B)
# 从B再生成A
reconstr_A = self.g_BA(fake_B)
# 从B再生成A
reconstr_B = self.g_AB(fake_A)
self.g_AB.summary()
# 通过g_BA传入img_A
img_A_id = self.g_BA(img_A)
# 通过g_AB传入img_B
img_B_id = self.g_AB(img_B)
# 在这一部分,评价模型不训练。
self.d_A.trainable = False
self.d_B.trainable = False
# 评价是否为真
valid_A = self.d_A(fake_A)
valid_B = self.d_B(fake_B)
# 训练
self.combined = Model(inputs=[img_A, img_B],
outputs=[ valid_A, valid_B,
reconstr_A, reconstr_B,
img_A_id, img_B_id ])
self.combined.compile(loss=['mse', 'mse',
'mae', 'mae',
'mae', 'mae'],
loss_weights=[0.5, 0.5,
self.lambda_cycle, self.lambda_cycle,
self.lambda_id, self.lambda_id ],
optimizer=optimizer)
def build_generator(self):
model = get_resnet(self.img_rows,self.img_cols,self.channels)
return model
def build_discriminator(self):
def conv2d(layer_input, filters, f_size=4, normalization=True):
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
if normalization:
d = InstanceNormalization()(d)
d = LeakyReLU(alpha=0.2)(d)
return d
img = Input(shape=self.img_shape)
# 128
d1 = conv2d(img, 64, normalization=False)
# 64
d2 = conv2d(d1, 128)
# 32
d3 = conv2d(d2, 256)
# 16
d4 = conv2d(d3, 512)
# 对每个像素点判断是否有效
validity = Conv2D(1, kernel_size=3, strides=1, padding='same')(d4)
return Model(img, validity)
def scheduler(self,models,epoch):
# 每隔100个epoch,学习率减小为原来的1/2
if epoch % 20 == 0 and epoch != 0:
for model in models:
lr = K.get_value(model.optimizer.lr)
K.set_value(model.optimizer.lr, lr * 0.5)
print("lr changed to {}".format(lr * 0.5))
def train(self, init_epoch, epochs, batch_size=1, sample_interval=50):
start_time = datetime.datetime.now()
valid = np.ones((batch_size,) + self.disc_patch)
fake = np.zeros((batch_size,) + self.disc_patch)
if init_epoch!= 0:
self.d_A.load_weights("weights/%s/d_A_epoch%d.h5" % (self.dataset_name, init_epoch),skip_mismatch=True)
self.d_B.load_weights("weights/%s/d_B_epoch%d.h5" % (self.dataset_name, init_epoch),skip_mismatch=True)
self.g_AB.load_weights("weights/%s/g_AB_epoch%d.h5" % (self.dataset_name, init_epoch),skip_mismatch=True)
self.g_BA.load_weights("weights/%s/g_BA_epoch%d.h5" % (self.dataset_name, init_epoch),skip_mismatch=True)
for epoch in range(init_epoch,epochs):
self.scheduler([self.combined,self.d_A,self.d_B],epoch)
for batch_i, (imgs_A, imgs_B) in enumerate(self.data_loader.load_batch(batch_size)):
# ------------------ #
# 训练生成模型
# ------------------ #
g_loss = self.combined.train_on_batch([imgs_A, imgs_B],
[valid, valid,
imgs_A, imgs_B,
imgs_A, imgs_B])
# ---------------------- #
# 训练评价者
# ---------------------- #
# A到B的假图片,此时生成的是假橘子
fake_B = self.g_AB.predict(imgs_A)
# B到A的假图片,此时生成的是假苹果
fake_A = self.g_BA.predict(imgs_B)
# 判断真假图片,并以此进行训练
dA_loss_real = self.d_A.train_on_batch(imgs_A, valid)
dA_loss_fake = self.d_A.train_on_batch(fake_A, fake)
dA_loss = 0.5 * np.add(dA_loss_real, dA_loss_fake)
# 判断真假图片,并以此进行训练
dB_loss_real = self.d_B.train_on_batch(imgs_B, valid)
dB_loss_fake = self.d_B.train_on_batch(fake_B, fake)
dB_loss = 0.5 * np.add(dB_loss_real, dB_loss_fake)
d_loss = 0.5 * np.add(dA_loss, dB_loss)
elapsed_time = datetime.datetime.now() - start_time
print ("[Epoch %d/%d] [Batch %d/%d] [D loss: %f, acc: %3d%%] [G loss: %05f, adv: %05f, recon: %05f, id: %05f] time: %s " \
% ( epoch, epochs,
batch_i, self.data_loader.n_batches,
d_loss[0], 100*d_loss[1],
g_loss[0],
np.mean(g_loss[1:3]),
np.mean(g_loss[3:5]),
np.mean(g_loss[5:6]),
elapsed_time))
if batch_i % sample_interval == 0:
self.sample_images(epoch, batch_i)
if epoch % 5 == 0 and epoch != init_epoch:
os.makedirs('weights/%s' % self.dataset_name, exist_ok=True)
self.d_A.save_weights("weights/%s/d_A_epoch%d.h5" % (self.dataset_name, epoch))
self.d_B.save_weights("weights/%s/d_B_epoch%d.h5" % (self.dataset_name, epoch))
self.g_AB.save_weights("weights/%s/g_AB_epoch%d.h5" % (self.dataset_name, epoch))
self.g_BA.save_weights("weights/%s/g_BA_epoch%d.h5" % (self.dataset_name, epoch))
def sample_images(self, epoch, batch_i):
os.makedirs('images/%s' % self.dataset_name, exist_ok=True)
r, c = 2, 2
imgs_A = self.data_loader.load_data(domain="A", batch_size=1, is_testing=True)
imgs_B = self.data_loader.load_data(domain="B", batch_size=1, is_testing=True)
fake_B = self.g_AB.predict(imgs_A)
fake_A = self.g_BA.predict(imgs_B)
gen_imgs = np.concatenate([imgs_A, fake_B, imgs_B, fake_A])
gen_imgs = 0.5 * gen_imgs + 0.5
titles = ['Original', 'Translated', 'Reconstructed']
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt])
axs[i, j].set_title(titles[j])
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%s/%d_%d.png" % (self.dataset_name, epoch, batch_i))
plt.close()
if __name__ == '__main__':
gan = CycleGAN()
gan.train(init_epoch=15, epochs=200, batch_size=1, sample_interval=200)
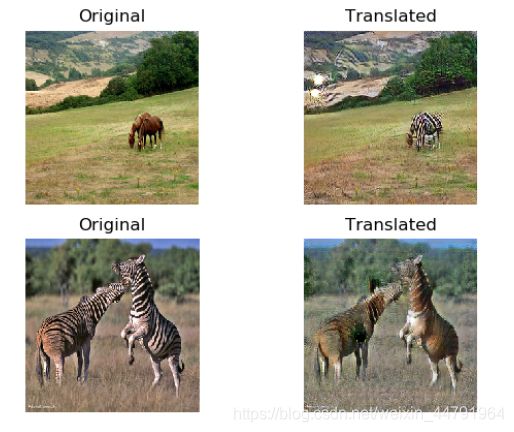
实现效果:
下图为训练了50代的效果(因为减少了残差模块的次数,而且训练的不够多,导致效果没有那么好):