STM32 SPI配置
用stm32的库进行深入
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
四根线
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK时钟信号,由主设备产生。
CS从设备片选信号,由主设备控制。
外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节
时钟极性CPOL对传输协议没有重大的影响,代表串行同步时钟的空闲状态下的电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设备时钟相位极性应该一致。
使用STM32的SPI读取SPIFLASH芯片(W25Q64),
第一步 配置SPI引脚 使能引脚及SPI时钟
第二步 配置SPI---工作模式+数据格式+时钟频率、极性
设置为主机模式
数据格式-8位
SCK时钟极性及采样方式
SPI时钟频率
数据格式-MSB在前还是LSB在前
typedef struct
{
uint16_t SPI_Direction;
uint16_t SPI_Mode;
uint16_t SPI_DataSize;
uint16_t SPI_CPOL;
uint16_t SPI_CPHA;
uint16_t SPI_NSS;
uint16_t SPI_BaudRatePrescaler;
uint16_t SPI_FirstBit;
uint16_t SPI_CRCPolynomial;
}SPI_InitTypeDef;
SPI_Direction;通信方式(全双工,半双工,串行发串行收)
SPI_Mode:主还是从 ,模式选择,SPI_Mode_Master or SPI_Mode_Slave
SPI_DataSize:数据帧长度选择,8位或16位
SPI_CPOL:时钟极性,(空闲态的电平)
SPI_CPHA:时钟相位,串行时钟第一个跳变沿采样数据,或第二个跳变沿~~SPI_CPHA_2Edge
SPI_NSS:NSS信号由硬件控制还是软件控制,这里SPI_NSS_Soft
SPI_BaudRatePrescaler:设置SPI波特率预分频值,也就是决定SPI的时钟的参数,从不分频道256分频8个可选值,初始化的时候我们选择256分频值SPI_BaudRatePrescaler_256, 传输速度为36M/256=140.625KHz。
SPI_FirstBit:数据传输顺序,MSB在前或LSB在前
SPI_CRCPolynomial:是用来设置CRC校验多项式,提高通信可靠性,大于1即可。
9个参数。
定义这个结构,
SPI_InitTypeDef SPI_InitStructure;
每个参数都选合适了
调用SPI_Init(SPI2,&SPI_InitStructure);
根据指定的参数初始化外设SPIx寄存器,
初始化完了,还有个开关,现在我们来使能这个SPI2口通信,
SPI_Cmd(SPI2,ENABLE);
使能这个外设
现在可以用了,发数据吧,
void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data);
uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx);
发数据,接收数据,传输传输,我们经常要判断这个数据是否传输完成了,是不是,发送区是否为空等等,
SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE);
引脚介绍
SPI 包含 4 条总线,SPI 总线包含 4 条总线,分别为
——SS 、SCK、MOSI、MISO。它们的作用介绍如下 :
1)SS ( Slave Select):片选信号线,当有多个 SPI 设备与 MCU 相连时,每个设备
的这个片选信号线是与 MCU 单独的引脚相连的,而其他的 SCK、MOSI、MISO线则为多个设备并联到相同的 SPI 总线上,见图 15- 1。当 SS 信号线为低电平时,片选有效,开始SPI 通信。
2)SCK (Serial Clock):时钟信号线,由主通信设备产生,不同的设备支持的时钟
频率不一样,如 STM32 的 SPI 时钟频率最大为 f PCLK /2。
3)MOSI (MasterOutput, Slave Input):主设备输出 / 从设备输入引脚。主机的数据
从这条信号线输出,从机由这条信号线读入数据,即这条线上数据的方向为主机到从机。
4)miso主设备输入/ 从设备输出引脚。主机从这条信号线读入数据,从机的数据则由这条信号线输出,即在这条线上数据的方向为从机到主机。
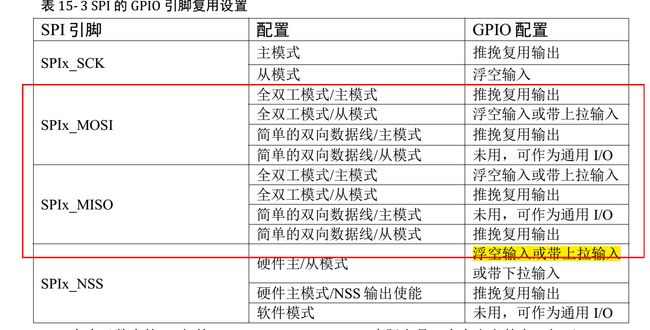
GPIO配置
硬件连接
编程要点
初始化了 SPI1 复用到的 GPIO 引脚,启动了 GPIO 及 SPI1 外设
的时钟,并初始化了 SPI 的模式
1)SPI_Mode :STM32 的 SPI 设 备 可 以 工 作 于 主 机 模 式(SPI_Mode_Master)
或 从 机 模 式(SPI_Mode_Slave),这两个模式的最大区别为 SPI 的 SCK 信号线的时序,
SCK 的时序是由通信中的主机产生的。若被配置为从机模式,STM32 的 SPI 模块将接受外
来的 SCK 信号。本实验中 STM32 作为 SPI 通信中的主机,我们向这个成员赋值为主机模
式(SPI_Mode_Master)。
2)SPI_DataSize :这个成员可以选择 SPI 每次通信的数据大小(称为数据帧)为8 位
还是 16 位。从 Flash 的数据手册我们可以查到,本 Flash 通信的数据帧大小为 8 位,
STM32 的 SPI 模块设置要与之相同。
3)SPI_CPOL 和 SPI_CPHA :这 两 个 成 员 即 配 置 SPI 的 时 钟 极 性(CPOL) 和
时 钟 相 位(CPHA),这两个配置影响到 SPI 的通信模式,该设置要符合将要互相通信的
设备的要求。CPOL 分别可以取 SPI_CPOL_High(SPI 通信空闲时 SCK 为高电平)和
SPI_CPOL_Low(SPI 通信空闲时 SCK 为低电平)。CPHA则可以取 SPI_CPHA_1Edge
(在 SCK 的奇数边沿采集数据) 和 SPI_CPHA_2Edge (在 SCK 的偶数边沿采集数
据) 。
查阅本 Flash 的使用手册,见图 15- 6。可以了解到这个 Flash 支持以 SPI 的模式 0 和模式 3
通信。即在 SPI 空闲时,SCK 为低电平,奇数边沿采样(模式 0);也可以在 SPI 空闲
时,SCK 为高电平,偶数边沿采样(模式 3)。即无论 CPOL 的状态是什么,Flash的数据
采样时刻为 SCK 的上升沿。我们在本实验配置使用它的模式 3,即把 CPOL 赋值为
SPI_CPOL_High ;
2)4 ) SPI_NSS : 本 成 员 配 置 NSS 引 脚 的 使 用 模 式 , 可 以 选 择 为 硬 件 模 式
(SPI_NSS_Hard )与软件模式(SPI_NSS_Soft),在硬件模式中的 SPI 片选信号由硬件自
动产生,而软件模式则需要我们亲自把相应的 GPIO 端口拉高或置低产生非片选和片选信
号。如果外界条件允许,硬件模式还会自动将 STM32 的 SPI 设置为主机。本实验使用软件
模式,向这个成员赋值为 SPI_NSS_Soft 。
5)SPI_BaudRatePrescaler :本成员设置波特率分频值,分频后的时钟即为 SPI 的 SCK
信号线的时钟频率。这个成员参数可设置为 f PCLK 的 2、4、6、8、16、32、64、128、
256 分频。本实验向这个成员赋值为 SPI_BaudRatePrescaler_4,即 f PCLK 的 4 分频。
6)SPI_FirstBit :所有串行的通信协议都会有 MSB 先行(高位数据在前)还是 LSB
先行(低位数据在前)的问题,而 STM32 的 SPI 模块可以通过这个结构体成员,对这个特
性 编 程 控 制 。 据 Flash 的 通 信 时 序 , 我 们 向 这 个 成 员 赋 值 为 MSB 先 行
(SPI_FirstBit_MSB)。
7)SPI_CRCPolynomial :这是 SPI 的 CRC 校验中的多项式,若我们使用 CRC 校验
时,就使用这个成员的参数(多项式)来计算 CRC 的值。由于本实验的 Flash 不支持 CRC
校验,所以我们向这个结构体成员赋值为7 实际上是没有意义的。
配置完这些结构体成员后,我们要调用SPI_Init() 函数把这些参数写入寄存器中,实现
SPI 的初始化,然后调用

CPOL 是空空闲时电平 选择高还是低得看Datasheet时序图
CPHA 第几个边沿有效 看时钟哪个边沿在数据中间穿过