求解问题
提问0:
卓老师,我是参加今年智能车比赛的一名队员,有几个问题想要问一下。
- 卓老师,北京什么时候能开学您有消息吗?比赛时间会推迟吗?
- 目前北京防疫形势较为严重,那么对应华北赛区的比赛将如何举办呢?江苏已经有一批高校开学,北京应该是开学最晚的一个城市 那么大家备赛的时间就会大大减少,对于北京高校和其他地区的比赛安排有没有差别呢?比如对于北京这边高校可以适当延迟比赛时间,或直接推进全国赛?
- 今年疫情形势特殊,比赛方式还是需要到比赛学校现场比赛吗?有没有可能采用算法之类的或者安排模拟仿真之类的比赛?
回复:
- 北京什么时候能够开学我现在没有任何消息。比赛时间会根据疫情和各高校开学日期的变动进行调制。具体比赛预案参见下面的描述。
- 原定的华北赛区的比赛承办学校还是在北京科技大学天津学院。具体时间和方式需要了在竞赛组委会扩大会议上进行讨论。
- 关于比赛形式参见下面的“疫情下比赛预案”,这部分内容在已经公布的竞赛规则中有描述。
疫情下比赛预案如下:
1. 新冠疫情影响
由于受到COVID-19疫情影响,现在各地高校还未普遍开学。从年初根据教育部的统一部署,各级教育部门为了防止疫情的蔓延,采取了延期开学的举措,在疫情期间开展“停课不停学”的网络教学过程,这在一定程度上可以使得理论课程得以开展,但是对于实践教学过程,则由于学生无法返校,所以会受到不同程度的影响。
按照智能车竞赛章程,参加竞赛的同学利用平时的课余时间完成车模作品的制作,调试以及相互的交流,在暑期进行赛会现场比赛。新冠肺炎疫情对于比赛将会产生两方面的影响:
- 由于各高校延迟开学,参赛学生制作参赛智能车作品实际调试时间减少。特别是对于现在疫情中心的湖北地区、防控重心的北京地区的高校,可能开学时间要比其他省份更晚;
- 高校暑期活动变动比较大。相对于以往,高校往往在暑期除了必要的小学期之外,会有一个多月的暑假。承办比赛的学校可以利用这段时间开展智能车竞赛的组织工作。由于今年各高校开学延期,可能会有一部分的活动推迟到暑期,使得暑期的放假时间减少;留给举办竞赛的时间窗口期减小;
- 疫情变成更长周期的防控,使得赛会形式的大规模集中比赛不能够举行。
由于现在到暑期还有三个多月,疫情的影响还在不断地变化当中。为此,竞赛秘书处为2020年的第十五届竞赛制定了一下比赛预案。
2. 比赛预案
比赛预案分为两个方面:比赛时间安排和比赛组织流程。
(1)推迟比赛时期
按照往届,智能车竞赛分赛区(省赛区)是在每年的七月份举行,全国总决赛安排在每年的八月份举行。由于各高校学生准备比赛的时间减少,计划今年的比赛都安排在8月中下旬完成。即在8月份中旬进行分赛区的预赛,一周后便进行全国总决赛。
如果届时,各高校有了现在无法预料的重大事情,暑期的比赛无法举行,则会考虑将第十五届智能车竞赛安排在2020年年末寒假矩形。
(2)简化比赛组织流程
为了减少赛会聚集带来防疫工作的影响,对于比赛流程做如下的简化与改动。
A. 简化比赛日程安排
如果比赛还是按照赛会现场比赛的形式,传统的比赛组织将会占用四天的时间,分别是报道、调试、预赛和决赛。经过简化,可以将比赛时间缩减到两天。即取消原来的调试过程和比赛的开幕式,将报道当天就开始现场的预赛,就按照先来后到的顺序分批次进入竞赛场地完成车模预赛科目的比赛,该过程一直持续到第二天中午。在第二天下午完成决赛和颁奖闭幕式。

▲ 传统的比赛组织流程 ▲
B. 改变参赛模式
根据疫情影响和承办学校的具体情况,在;秉承竞赛的“公平、公正、公开”的原则下,改变参赛模式。具体有以下四种模式:
- 赛会制现场比赛
按照传统的比赛方式,参赛队伍所有成员在比赛期间前往竞赛承办学校完成现场的比赛。采用前面简化比赛流程,完成竞赛内容。 - 参赛队代表比赛
每个学校选派1到3名参赛队伍代表,携带所有车模作品到现场完成作品性能展示比赛。这样可以大大减少现场学生的数量。 - 比赛作品快递比赛
参赛队伍可以不到现场,而是通过快到将车模作品寄送到承办学校。由承办学校的志愿者协助完成作品的性能展示。 - 分组校内比赛
竞赛组委会选择赛区内部分高校作为校内赛基地。统一发放标准的比赛器材(赛道、比赛系统),有高校联合附近的学校完成校内赛。比赛过程通过网络直播,组委会指定指导教师交叉监视完成竞赛。
具体比赛方式将会在6月中旬组委会第二次扩大会议讨论之后进行公布。
提问1
卓老师,一张是我自己焊的麦克风,它在安静时会有这样的波形,不知道应该怎么处理,第二张是采集到数据,但是不知道应该从哪里算起始点和结束点,刚好判断2048个点是不是太难了。/::<

▲ 采集到的信号波形图 ▲
回复:
- 由于你没有在你发送的波形图中表明相关的时间和电压刻度,所以很难看出对应的信号的频率和幅值。从波形上来看,第一张图应该是50Hz工频干扰信号;
- 第二张图采集到的Chirp信号看起来不错。如果只有一个MIC,则需要使用该信号与调频接受模块所得到的Chirp声音进行相关,获得声音延迟。如果使用MIC阵列,则需要求取这些信号两两之间的相关结果,并获得它们之间的时间延迟。
提问2
卓大大,fm可以用这种模块嘛?

▲ 立体声接受模块 TEA5767 ▲
回复: 允许的。
提问3:
卓大大好,百度飞桨的比赛什么时候开始呀,好像还是找不到诶
回复:正式比赛内容文档将近期会在竞赛网站公布。
竞赛网站为:
提问4:
卓老师,有没有公众号的二维码,让学弟们关注一波。
回复: 可以使用如下的公众号二维码:

▲ 公众号二维码 ▲
与大赛相关的推文,都是借助于CSDN网站的MARKDOWN编辑器编辑并生成对应的公众号推文。并且在CSDN中还包含有很多关于竞赛相关实验记录、原始数据、程序、算法描述等。所以也可以关注一下CSDN的账号:

▲ CSDN二维码 ▲
提问5
卓大大您好,我在求解这道题的时候发现好像如果先求出sin(2πt)的傅里叶变换再利用平移性质,求出来的答案和直接将sin函数利用三角函数的公式打开结果好像并不相同,请问这是为什么呢?周期信号的傅里叶变换并不满足我们得到的傅里叶变换的某些性质吗?

▲ 练习题内容 ▲
回复: 由于你没有告诉我你具体两种方法所得到的答案究竟有什么不同,所以我也无法直道具体你的答案哪个是正确的,哪个是错误的。往往在使用时移特性的时候,经常出现的错误是对时移的具体数值忘记除以函数自变量前面的系数了。
卓大大您好,很抱歉我前面没有把我的问题描述清楚,我把我的两种方法写在下面这张图里面了,我个人觉得第一种方法是正确的,但是我想知道第二种方法为什么错了,是因为周期函数的傅里叶变换的性质有某些不同吗?
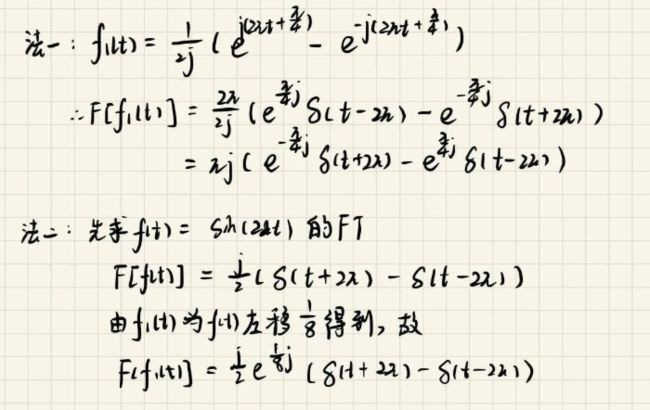
▲ 学生的求解过程 ▲
回复: 应该是在第二中方法求解过程中出现了问题。首先,对于 sin ( 2 π t ) \sin \left( {2\pi t} \right) sin(2πt)的傅里叶变换应该等于 j π [ δ ( ω + 2 π ) − δ ( ω − 2 π ) ] j\pi \left[ {\delta \left( {\omega + 2\pi } \right) - \delta \left( {\omega - 2\pi } \right)} \right] jπ[δ(ω+2π)−δ(ω−2π)]
其次,信号平移1/8之后,信号的频谱出现了线性相位因子,此时 sin ( 2 π t + π 4 ) \sin \left( {2\pi t + {\pi \over 4}} \right) sin(2πt+4π)的傅里叶变换应该等于 j π [ δ ( ω + 2 π ) − δ ( ω − 2 π ) ] ⋅ e j ω 1 8 j\pi \left[ {\delta \left( {\omega + 2\pi } \right) - \delta \left( {\omega - 2\pi } \right)} \right] \cdot e^{j\omega {1 \over 8}} jπ[δ(ω+2π)−δ(ω−2π)]⋅ejω81
最后,将上述表达式化简之后,利用 δ ( ω ) \delta \left( \omega \right) δ(ω)的抽样特性,可以得到与方法一相同的结果。
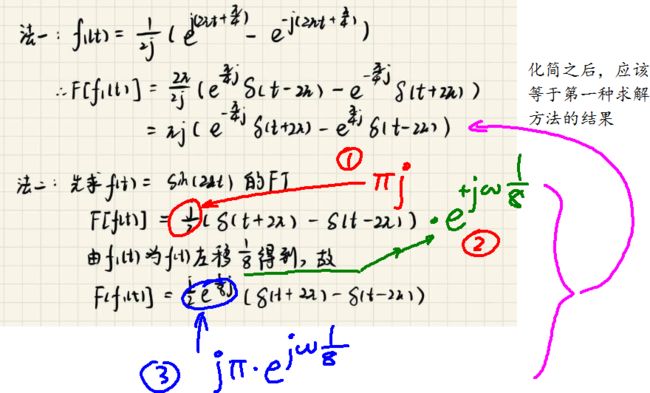
▲ 第二种求解方法中的错误 ▲
F T [ sin ( 2 π t + π 4 ) ] = F T { sin [ 2 π ( t + 1 8 ) ] } FT\left[ {\sin \left( {2\pi t + {\pi \over 4}} \right)} \right] = FT\left\{ {\sin \left[ {2\pi \left( {t + {1 \over 8}} \right)} \right]} \right\} FT[sin(2πt+4π)]=FT{sin[2π(t+81)]} = F T [ sin ( 2 π t ) ] ⋅ e j ω 8 = FT\left[ {\sin \left( {2\pi t} \right)} \right] \cdot e^{{{j\omega } \over 8}} =FT[sin(2πt)]⋅e8jω = j π [ δ ( ω + 2 π ) − δ ( ω − 2 π ) ] ⋅ e j ω 8 = j\pi \left[ {\delta \left( {\omega + 2\pi } \right) - \delta \left( {\omega - 2\pi } \right)} \right] \cdot e^{{{j\omega } \over 8}} =jπ[δ(ω+2π)−δ(ω−2π)]⋅e8jω = j π [ e j ω 8 ⋅ δ ( ω + 2 π ) − e j ω 8 ⋅ δ ( ω − 2 π ) ] = j\pi \left[ {e^{{{j\omega } \over 8}} \cdot \delta \left( {\omega + 2\pi } \right) - e^{{{j\omega } \over 8}} \cdot \delta \left( {\omega - 2\pi } \right)} \right] =jπ[e8jω⋅δ(ω+2π)−e8jω⋅δ(ω−2π)] = π [ e j ω 8 ∣ ω = − 2 π ⋅ δ ( ω + 2 π ) − e j ω 8 ∣ ω = 2 π ⋅ δ ( ω − 2 π ) ] = \pi \left[ {\left. {e^{{{j\omega } \over 8}} } \right|_{\omega = - 2\pi } \cdot \delta \left( {\omega + 2\pi } \right) - \left. {e^{{{j\omega } \over 8}} } \right|_{\omega = 2\pi } \cdot \delta \left( {\omega - 2\pi } \right)} \right] =π[e8jω∣∣∣ω=−2π⋅δ(ω+2π)−e8jω∣∣∣ω=2π⋅δ(ω−2π)] = j π [ e − j π 4 ⋅ δ ( ω + 2 π ) − e j π 4 ⋅ δ ( ω − 2 π ) ] = j\pi \left[ {e^{ - j{\pi \over 4}} \cdot \delta \left( {\omega + 2\pi } \right) - e^{j{\pi \over 4}} \cdot \delta \left( {\omega - 2\pi } \right)} \right] =jπ[e−j4π⋅δ(ω+2π)−ej4π⋅δ(ω−2π)]
提问6:
卓老师,我想问一下您之前发的那个rda5807fm信号接收模块他输出的左右声道信号一样吗,我对其中任何一个做ad都可以吗?

回复: 一模一样的。对左右两个声道进行AD都是可以的。
提问7:
卓大大,我有个问题一直不太懂,就是那个只用声音信号做怎么做互相关之后求出延时呀,就信标在发送声音信号,我的单片机接收到了之后直接和之前存储的声音信号数据做互相关吗,这样得到的那个最大值对应的数据并不是声音的延时吧,我感觉发送和接收之间在时间上没有一样的基准吧?
回复: 可以对麦克风阵列中的两两麦克风之间的声音通过互相关求时间差;也可以对麦克风接收到的声音与调频收音模块获得的Chirp声音求互相关获得时间差。
提问8:
卓大大,我下载了您的滑轨测距数据包,用Python读取数据后,想打印出接收和发送的数据,但是打印时无法通过data.keys()获得数组名,并且尝试使用您在推文上写的数组名访问和使用默认数组名访问,这些方法都无法打印出我想要的数据。 只能通过data[‘dataall’]打印出所有数据,请问如何打印出接收和发送数据的数组呢?(Python新手上路中)
回复: 你需要通过打印 data.files 来获得data中的各个变量的 keys,然后再通过keys获得各个变量的数值。