MFC串口操作一:显示串口输入信息
目录
一、目的
1、想知道:MFC串口输入输出信息
二、参考
1、无
三、问题:
1、当有提示说明:OnComm不准确时候,
①方法一:LONG改为LRESULT
四、操作
1、运行效果:完成MFC获取串口输入信息功能
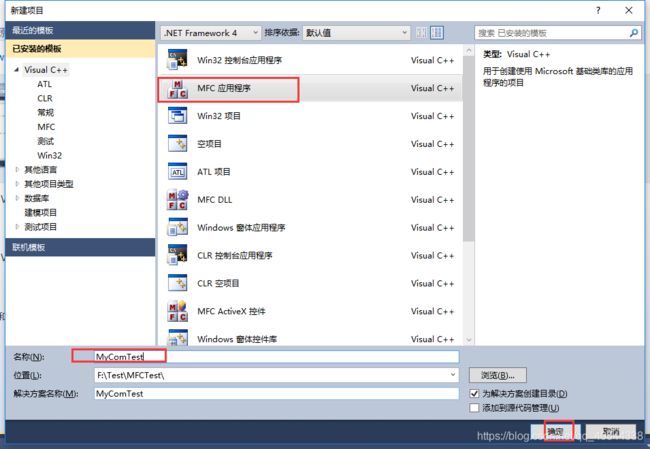
1、创建新工程:我取名字为:MyComTest
1、SerialPort.h
1、SerialPort.cpp
1、将SerialPort.h和SerialPort.cpp文件复制到项目中
1、头文件添加现有项:SerialPort.h
1、源文件添加现有项:SerialPort.cpp
1、MyComTestDlg.h:创建串口SerialPort类:记得头文件
1、创建编辑框:显示外面发送来的串口信息:名字叫做:IDC_EDIT1
1、添加MFC相应消息事件:为了方便得到外面的信息:(因为我没有找到类向导之类直接导入这个事件的方法,直接填写代码也可以实现同样的功能)
1、初始化:串口类:MyComTestDlg.cpp:OnInitDialog()中
1、注销和关闭串口:
一、目的
1、想知道:MFC串口输入输出信息
二、参考
1、无
三、问题:
1、当有提示说明:OnComm不准确时候,
![]()
答:
①方法一:LONG改为LRESULT
afx_msg LRESULT OnComm(WPARAM ch,LPARAM port);//为了有消息给MFC发送后,MFC有变化
LRESULT CFlashAndVideoDlg::OnComm(WPARAM ch,LPARAM port)
四、操作
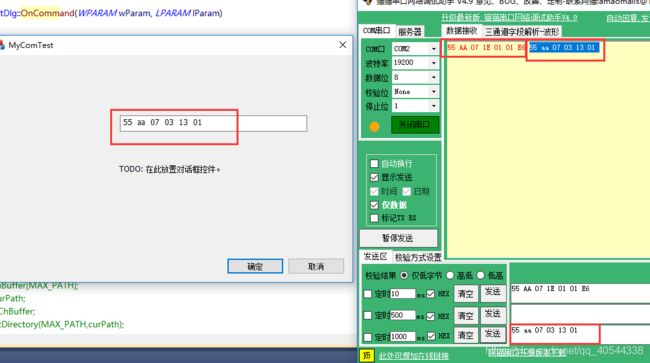
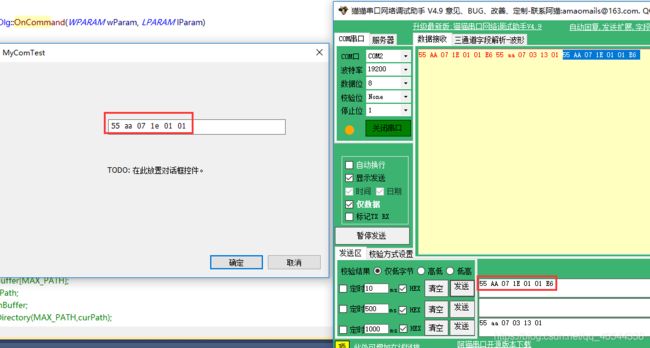
1、运行效果:完成MFC获取串口输入信息功能
①我发送了7位的串口信号,它只会读取我设置额度前6个信号。
1、创建新工程:我取名字为:MyComTest
1、SerialPort.h
#pragma once
#define WM_COMM_BREAK_DETECTED WM_USER+1 // A break was detected on input.
#define WM_COMM_CTS_DETECTED WM_USER+2 // The CTS (clear-to-send) signal changed state.
#define WM_COMM_DSR_DETECTED WM_USER+3 // The DSR (data-set-ready) signal changed state.
#define WM_COMM_ERR_DETECTED WM_USER+4 // A line-status error occurred. Line-status errors are CE_FRAME, CE_OVERRUN, and CE_RXPARITY.
#define WM_COMM_RING_DETECTED WM_USER+5 // A ring indicator was detected.
#define WM_COMM_RLSD_DETECTED WM_USER+6 // The RLSD (receive-line-signal-detect) signal changed state.
#define WM_COMM_RXCHAR WM_USER+7 // A character was received and placed in the input buffer.
#define WM_COMM_RXFLAG_DETECTED WM_USER+8 // The event character was received and placed in the input buffer.
#define WM_COMM_TXEMPTY_DETECTED WM_USER+9 // The last character in the output buffer was sent.
class CSerialCom
{
public:
int m_nWriteSize;
void ClosePort();
// contruction and destruction
CSerialCom();
virtual ~CSerialCom();
// port initialisation
BOOL InitPort(CWnd* pPortOwner, UINT portnr = 1, UINT baud = 9600, char parity = 'N', UINT databits = 8, UINT stopbits = 1, DWORD dwCommEvents = EV_RXCHAR, UINT writebuffersize = 1024);
HANDLE m_hComm;
// start/stop comm watching
BOOL StartMonitoring();
BOOL RestartMonitoring();
BOOL StopMonitoring();
DWORD GetWriteBufferSize();
DWORD GetCommEvents();
DCB GetDCB();
void WriteToPort(char* string);
void WriteToPort(char* string, int n);
void WriteToPort(LPCTSTR string);
void WriteToPort(LPCTSTR string, int n);
void EnumerateSerialPorts(CUIntArray& ports);
protected:
// protected memberfunctions
void ProcessErrorMessage(char* ErrorText);
static UINT CommThread(LPVOID pParam);
static void ReceiveChar(CSerialCom* port, COMSTAT comstat);
static void WriteChar(CSerialCom* port);
// thread
CWinThread* m_Thread;
// synchronisation objects
CRITICAL_SECTION m_csCommunicationSync;
BOOL m_bThreadAlive;
// handles
HANDLE m_hWriteEvent;
HANDLE m_hShutdownEvent;
// Event array.
// One element is used for each event. There are two event handles for each port.
// A Write event and a receive character event which is located in the overlapped structure (m_ov.hEvent).
// There is a general shutdown when the port is closed.
HANDLE m_hEventArray[3];
// structures
OVERLAPPED m_ov;
COMMTIMEOUTS m_CommTimeouts;
DCB m_dcb;
// owner window
CWnd* m_pOwner;
// misc
UINT m_nPortNr;
char* m_szWriteBuffer;
DWORD m_dwCommEvents;
DWORD m_nWriteBufferSize;
};
1、SerialPort.cpp
#include "stdafx.h"
#include "SerialPort.h"
#include
//
// Constructor
//
#pragma warning(disable:4996)
CSerialCom::CSerialCom()
{
m_hComm = NULL;
// initialize overlapped structure members to zero
m_ov.Offset = 0;
m_ov.OffsetHigh = 0;
// create events
m_ov.hEvent = NULL;
m_hWriteEvent = NULL;
m_hShutdownEvent = NULL;
m_szWriteBuffer = NULL;
m_nWriteSize = 1;
m_bThreadAlive = FALSE;
}
//
// Delete dynamic memory
//
CSerialCom::~CSerialCom()
{
do
{
SetEvent(m_hShutdownEvent);
} while (m_bThreadAlive);
TRACE("Thread ended/n");
delete[] m_szWriteBuffer;
}
//
// Initialize the port. This can be port 1 to 4.
//
BOOL CSerialCom::InitPort(CWnd* pPortOwner, // the owner (CWnd) of the port (receives message)
UINT portnr, // portnumber (1..8)
UINT baud, // baudrate
char parity, // parity
UINT databits, // databits
UINT stopbits, // stopbits
DWORD dwCommEvents, // EV_RXCHAR, EV_CTS etc
UINT writebuffersize) // size to the writebuffer
{
assert(portnr > 0 && portnr < 20);
assert(pPortOwner != NULL);
// if the thread is alive: Kill
if (m_bThreadAlive)
{
do
{
SetEvent(m_hShutdownEvent);
} while (m_bThreadAlive);
TRACE("Thread ended/n");
}
// create events
if (m_ov.hEvent != NULL)
ResetEvent(m_ov.hEvent);
m_ov.hEvent = CreateEvent(NULL, TRUE, FALSE, NULL);
if (m_hWriteEvent != NULL)
ResetEvent(m_hWriteEvent);
m_hWriteEvent = CreateEvent(NULL, TRUE, FALSE, NULL);
if (m_hShutdownEvent != NULL)
ResetEvent(m_hShutdownEvent);
m_hShutdownEvent = CreateEvent(NULL, TRUE, FALSE, NULL);
// initialize the event objects
m_hEventArray[0] = m_hShutdownEvent; // highest priority
m_hEventArray[1] = m_hWriteEvent;
m_hEventArray[2] = m_ov.hEvent;
// initialize critical section
InitializeCriticalSection(&m_csCommunicationSync);
// set buffersize for writing and save the owner
m_pOwner = pPortOwner;
if (m_szWriteBuffer != NULL)
delete[] m_szWriteBuffer;
m_szWriteBuffer = new char[writebuffersize];
m_nPortNr = portnr;
m_nWriteBufferSize = writebuffersize;
m_dwCommEvents = dwCommEvents;
BOOL bResult = FALSE;
char *szPort = new char[50];
char *szBaud = new char[50];
// now it critical!
EnterCriticalSection(&m_csCommunicationSync);
// if the port is already opened: close it
if (m_hComm != NULL)
{
CloseHandle(m_hComm);
m_hComm = NULL;
}
// prepare port strings
sprintf(szPort, "COM%d", portnr);
sprintf(szBaud, "baud=%d parity=%c data=%d stop=%d", baud, parity, databits, stopbits);
// get a handle to the port
m_hComm = CreateFileA(szPort, // communication port string (COMX)
GENERIC_READ | GENERIC_WRITE, // read/write types
0, // comm devices must be opened with exclusive access
NULL, // no security attributes
OPEN_EXISTING, // comm devices must use OPEN_EXISTING
FILE_FLAG_OVERLAPPED, // Async I/O
0); // template must be 0 for comm devices
if (m_hComm == INVALID_HANDLE_VALUE)
{
// port not found
delete[] szPort;
delete[] szBaud;
return FALSE;
}
// set the timeout values
m_CommTimeouts.ReadIntervalTimeout = 1000;
m_CommTimeouts.ReadTotalTimeoutMultiplier = 1000;
m_CommTimeouts.ReadTotalTimeoutConstant = 1000;
m_CommTimeouts.WriteTotalTimeoutMultiplier = 1000;
m_CommTimeouts.WriteTotalTimeoutConstant = 1000;
// configure
if (SetCommTimeouts(m_hComm, &m_CommTimeouts))
{
if (SetCommMask(m_hComm, dwCommEvents))
{
if (GetCommState(m_hComm, &m_dcb))
{
m_dcb.EvtChar = 'q';
m_dcb.fRtsControl = RTS_CONTROL_ENABLE; // set RTS bit high!
if (BuildCommDCBA(szBaud, &m_dcb))
{
if (SetCommState(m_hComm, &m_dcb))
; // normal operation... continue
else
ProcessErrorMessage("SetCommState()");
}
else
ProcessErrorMessage("BuildCommDCB()");
}
else
ProcessErrorMessage("GetCommState()");
}
else
ProcessErrorMessage("SetCommMask()");
}
else
ProcessErrorMessage("SetCommTimeouts()");
delete[] szPort;
delete[] szBaud;
// flush the port
PurgeComm(m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT);
// release critical section
LeaveCriticalSection(&m_csCommunicationSync);
TRACE("Initialisation for communicationport %d completed./nUse Startmonitor to communicate./n", portnr);
return TRUE;
}
//
// The CommThread Function.
//
UINT CSerialCom::CommThread(LPVOID pParam)
{
// Cast the void pointer passed to the thread back to
// a pointer of CSerialCom class
CSerialCom *port = (CSerialCom*)pParam;
// Set the status variable in the dialog class to
// TRUE to indicate the thread is running.
port->m_bThreadAlive = TRUE;
// Misc. variables
DWORD BytesTransfered = 0;
DWORD Event = 0;
DWORD CommEvent = 0;
DWORD dwError = 0;
COMSTAT comstat;
memset(&comstat, 0, sizeof(COMSTAT));
BOOL bResult = TRUE;
// Clear comm buffers at startup
if (port->m_hComm) // check if the port is opened
PurgeComm(port->m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT);
// begin forever loop. This loop will run as long as the thread is alive.
for (;;)
{
// Make a call to WaitCommEvent(). This call will return immediatly
// because our port was created as an async port (FILE_FLAG_OVERLAPPED
// and an m_OverlappedStructerlapped structure specified). This call will cause the
// m_OverlappedStructerlapped element m_OverlappedStruct.hEvent, which is part of the m_hEventArray to
// be placed in a non-signeled state if there are no bytes available to be read,
// or to a signeled state if there are bytes available. If this event handle
// is set to the non-signeled state, it will be set to signeled when a
// character arrives at the port.
// we do this for each port!
bResult = WaitCommEvent(port->m_hComm, &Event, &port->m_ov);
if (!bResult)
{
// If WaitCommEvent() returns FALSE, process the last error to determin
// the reason..
switch (dwError = GetLastError())
{
case ERROR_IO_PENDING:
{
// This is a normal return value if there are no bytes
// to read at the port.
// Do nothing and continue
break;
}
case 87:
{
// Under Windows NT, this value is returned for some reason.
// I have not investigated why, but it is also a valid reply
// Also do nothing and continue.
break;
}
default:
{
// All other error codes indicate a serious error has
// occured. Process this error.
port->ProcessErrorMessage("WaitCommEvent()");
break;
}
}
}
else
{ /*
// If WaitCommEvent() returns TRUE, check to be sure there are
// actually bytes in the buffer to read.
//
// If you are reading more than one byte at a time from the buffer
// (which this program does not do) you will have the situation occur
// where the first byte to arrive will cause the WaitForMultipleObjects()
// function to stop waiting. The WaitForMultipleObjects() function
// resets the event handle in m_OverlappedStruct.hEvent to the non-signelead state
// as it returns.
//
// If in the time between the reset of this event and the call to
// ReadFile() more bytes arrive, the m_OverlappedStruct.hEvent handle will be set again
// to the signeled state. When the call to ReadFile() occurs, it will
// read all of the bytes from the buffer, and the program will
// loop back around to WaitCommEvent().
//
// At this point you will be in the situation where m_OverlappedStruct.hEvent is set,
// but there are no bytes available to read. If you proceed and call
// ReadFile(), it will return immediatly due to the async port setup, but
// GetOverlappedResults() will not return until the next character arrives.
//
// It is not desirable for the GetOverlappedResults() function to be in
// this state. The thread shutdown event (event 0) and the WriteFile()
// event (Event2) will not work if the thread is blocked by GetOverlappedResults().
//
// The solution to this is to check the buffer with a call to ClearCommError().
// This call will reset the event handle, and if there are no bytes to read
// we can loop back through WaitCommEvent() again, then proceed.
// If there are really bytes to read, do nothing and proceed.
*/
bResult = ClearCommError(port->m_hComm, &dwError, &comstat);
if (comstat.cbInQue == 0)
continue;
} // end if bResult
// Main wait function. This function will normally block the thread
// until one of nine events occur that require action.
Event = WaitForMultipleObjects(3, port->m_hEventArray, FALSE, INFINITE);
switch (Event)
{
case 0:
{
// Shutdown event. This is event zero so it will be
// the higest priority and be serviced first.
CloseHandle(port->m_hComm);
port->m_hComm = NULL;
port->m_bThreadAlive = FALSE;
// Kill this thread. break is not needed, but makes me feel better.
AfxEndThread(100);
break;
}
case 2: // read event
{
GetCommMask(port->m_hComm, &CommEvent);
if (CommEvent & EV_RXCHAR)
// Receive character event from port.
ReceiveChar(port, comstat);
if (CommEvent & EV_CTS)
::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_CTS_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr);
if (CommEvent & EV_BREAK)
::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_BREAK_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr);
if (CommEvent & EV_ERR)
::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_ERR_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr);
if (CommEvent & EV_RING)
::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_RING_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr);
if (CommEvent & EV_RXFLAG)
::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_RXFLAG_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr);
break;
}
case 1: // write event
{
// Write character event from port
WriteChar(port);
break;
}
} // end switch
} // close forever loop
return 0;
}
//
// start comm watching
//
BOOL CSerialCom::StartMonitoring()
{
if (!(m_Thread = AfxBeginThread(CommThread, this)))
return FALSE;
TRACE("Thread started/n");
return TRUE;
}
//
// Restart the comm thread
//
BOOL CSerialCom::RestartMonitoring()
{
TRACE("Thread resumed/n");
m_Thread->ResumeThread();
return TRUE;
}
//
// Suspend the comm thread
//
BOOL CSerialCom::StopMonitoring()
{
TRACE("Thread suspended/n");
m_Thread->SuspendThread();
return TRUE;
}
//
// If there is a error, give the right message
//
void CSerialCom::ProcessErrorMessage(char* ErrorText)
{
char *Temp = new char[200];
LPVOID lpMsgBuf;
FormatMessage(
FORMAT_MESSAGE_ALLOCATE_BUFFER | FORMAT_MESSAGE_FROM_SYSTEM,
NULL,
GetLastError(),
MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT), // Default language
(LPTSTR)&lpMsgBuf,
0,
NULL
);
sprintf(Temp, "WARNING: %s Failed with the following error: /n%s/nPort: %d/n", ErrorText, (char*)lpMsgBuf, m_nPortNr);
MessageBoxA(NULL, Temp, "Application Error", MB_ICONSTOP);
LocalFree(lpMsgBuf);
delete[] Temp;
}
//
// Write a character.
//
void CSerialCom::WriteChar(CSerialCom* port)
{
BOOL bWrite = TRUE;
BOOL bResult = TRUE;
DWORD BytesSent = 0;
ResetEvent(port->m_hWriteEvent);
// Gain ownership of the critical section
EnterCriticalSection(&port->m_csCommunicationSync);
if (bWrite)
{
// Initailize variables
port->m_ov.Offset = 0;
port->m_ov.OffsetHigh = 0;
// Clear buffer
PurgeComm(port->m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT);
bResult = WriteFile(port->m_hComm, // Handle to COMM Port
port->m_szWriteBuffer, // Pointer to message buffer in calling finction
// strlen((char*)port->m_szWriteBuffer), // Length of message to send
port->m_nWriteSize, // Length of message to send
&BytesSent, // Where to store the number of bytes sent
&port->m_ov); // Overlapped structure
// deal with any error codes
if (!bResult)
{
DWORD dwError = GetLastError();
switch (dwError)
{
case ERROR_IO_PENDING:
{
// continue to GetOverlappedResults()
BytesSent = 0;
bWrite = FALSE;
break;
}
default:
{
// all other error codes
port->ProcessErrorMessage("WriteFile()");
}
}
}
else
{
LeaveCriticalSection(&port->m_csCommunicationSync);
}
} // end if(bWrite)
if (!bWrite)
{
bWrite = TRUE;
bResult = GetOverlappedResult(port->m_hComm, // Handle to COMM port
&port->m_ov, // Overlapped structure
&BytesSent, // Stores number of bytes sent
TRUE); // Wait flag
LeaveCriticalSection(&port->m_csCommunicationSync);
// deal with the error code
// if (!bResult)
{
// port->ProcessErrorMessage("GetOverlappedResults() in WriteFile()");
}
} // end if (!bWrite)
// Verify that the data size send equals what we tried to send
// if (BytesSent != strlen((char*)port->m_szWriteBuffer))
{
// TRACE("WARNING: WriteFile() error.. Bytes Sent: %d; Message Length: %d/n", BytesSent, strlen((char*)port->m_szWriteBuffer));
}
// ::SendMessage((port->m_pOwner)->m_hWnd, WM_COMM_TXEMPTY_DETECTED, (WPARAM) RXBuff, (LPARAM) port->m_nPortNr);
::SendMessage((port->m_pOwner)->m_hWnd, WM_COMM_TXEMPTY_DETECTED, 0, (LPARAM)port->m_nPortNr);
}
//
// Character received. Inform the owner
//
void CSerialCom::ReceiveChar(CSerialCom* port, COMSTAT comstat)
{
BOOL bRead = TRUE;
BOOL bResult = TRUE;
DWORD dwError = 0;
DWORD BytesRead = 0;
unsigned char RXBuff;
for (;;)
{
// Gain ownership of the comm port critical section.
// This process guarantees no other part of this program
// is using the port object.
EnterCriticalSection(&port->m_csCommunicationSync);
// ClearCommError() will update the COMSTAT structure and
// clear any other errors.
bResult = ClearCommError(port->m_hComm, &dwError, &comstat);
LeaveCriticalSection(&port->m_csCommunicationSync);
// start forever loop. I use this type of loop because I
// do not know at runtime how many loops this will have to
// run. My solution is to start a forever loop and to
// break out of it when I have processed all of the
// data available. Be careful with this approach and
// be sure your loop will exit.
// My reasons for this are not as clear in this sample
// as it is in my production code, but I have found this
// solutiion to be the most efficient way to do this.
if (comstat.cbInQue == 0)
{
// break out when all bytes have been read
break;
}
EnterCriticalSection(&port->m_csCommunicationSync);
if (bRead)
{
bResult = ReadFile(port->m_hComm, // Handle to COMM port
&RXBuff, // RX Buffer Pointer
1, // Read one byte
&BytesRead, // Stores number of bytes read
&port->m_ov); // pointer to the m_ov structure
// deal with the error code
if (!bResult)
{
switch (dwError = GetLastError())
{
case ERROR_IO_PENDING:
{
// asynchronous i/o is still in progress
// Proceed on to GetOverlappedResults();
bRead = FALSE;
break;
}
default:
{
// Another error has occured. Process this error.
port->ProcessErrorMessage("ReadFile()");
break;
}
}
}
else
{
// ReadFile() returned complete. It is not necessary to call GetOverlappedResults()
bRead = TRUE;
}
} // close if (bRead)
if (!bRead)
{
bRead = TRUE;
bResult = GetOverlappedResult(port->m_hComm, // Handle to COMM port
&port->m_ov, // Overlapped structure
&BytesRead, // Stores number of bytes read
TRUE); // Wait flag
// deal with the error code
if (!bResult)
{
port->ProcessErrorMessage("GetOverlappedResults() in ReadFile()");
}
} // close if (!bRead)
LeaveCriticalSection(&port->m_csCommunicationSync);
// notify parent that a byte was received
::SendMessage((port->m_pOwner)->m_hWnd, WM_COMM_RXCHAR, (WPARAM)RXBuff, (LPARAM)port->m_nPortNr);//发送消息,对应的消息函数接收数据
} // end forever loop
}
//
// Write a string to the port
//
void CSerialCom::WriteToPort(char* string)
{
assert(m_hComm != 0);
memset(m_szWriteBuffer, 0, sizeof(m_szWriteBuffer));
strcpy(m_szWriteBuffer, string);
m_nWriteSize = strlen(string);
// set event for write
SetEvent(m_hWriteEvent);
}
void CSerialCom::WriteToPort(char* string, int n)
{
assert(m_hComm != 0);
memset(m_szWriteBuffer, 0, sizeof(m_szWriteBuffer));
// memset(m_szWriteBuffer, 0, n);
// strncpy(m_szWriteBuffer, string, n);
memcpy(m_szWriteBuffer, string, n);
m_nWriteSize = n;
// set event for write
SetEvent(m_hWriteEvent);
}
#if 0
void CSerialCom::WriteToPort(LPCTSTR string)
{
assert(m_hComm != 0);
memset(m_szWriteBuffer, 0, sizeof(m_szWriteBuffer));
strcpy(m_szWriteBuffer, string);
m_nWriteSize = strlen(string);
// set event for write
SetEvent(m_hWriteEvent);
}
#endif
void CSerialCom::WriteToPort(LPCTSTR string, int n)
{
assert(m_hComm != 0);
memset(m_szWriteBuffer, 0, sizeof(m_szWriteBuffer));
// strncpy(m_szWriteBuffer, string, n);
memcpy(m_szWriteBuffer, string, n);
m_nWriteSize = n;
// set event for write
SetEvent(m_hWriteEvent);
}
//
// Return the device control block
//
DCB CSerialCom::GetDCB()
{
return m_dcb;
}
//
// Return the communication event masks
//
DWORD CSerialCom::GetCommEvents()
{
return m_dwCommEvents;
}
//
// Return the output buffer size
//
DWORD CSerialCom::GetWriteBufferSize()
{
return m_nWriteBufferSize;
}
void CSerialCom::ClosePort()
{
SetEvent(m_hShutdownEvent);
}
void CSerialCom::EnumerateSerialPorts(CUIntArray& ports)
{
ports.RemoveAll(); //Make sure we clear out any elements which may already be in the array
//Determine what OS we are running on
OSVERSIONINFO osvi;
osvi.dwOSVersionInfoSize = sizeof(OSVERSIONINFO);
BOOL bGetVer = GetVersionEx(&osvi);
//On NT use the QueryDosDevice API
if (bGetVer && (osvi.dwPlatformId == VER_PLATFORM_WIN32_NT))
{
//Use QueryDosDevice to look for all devices of the form COMx. This is a better
//solution as it means that no ports have to be opened at all.
TCHAR szDevices[65535];
DWORD dwChars = QueryDosDevice(NULL, szDevices, 65535);
if (dwChars) {
int i = 0;
for (;;) {
TCHAR* pszCurrentDevice = &szDevices[i]; //Add the port number to the array which will be returned
//If it looks like "COMX" then
//add it to the array which will be returned
int nLen = _tcslen(pszCurrentDevice);
if (nLen > 3 && _tcsnicmp(pszCurrentDevice, _T("COM"), 3) == 0) {
int nPort = _ttoi(&pszCurrentDevice[3]); //Work out the port number
ports.Add(nPort); //clear out com_0
}
// Go to next NULL character
while (szDevices[i] != _T('\0')) i++;
i++; // Bump pointer to the next string
// The list is double-NULL terminated, so if the character is
// now NULL, we're at the end
if (szDevices[i] == _T('\0')) break;
}
}
else TRACE(_T("Failed in call to QueryDosDevice, GetLastError:%d\n"), GetLastError());
}
else {
//On 95/98 open up each port to determine their existence
//Up to 255 COM ports are supported so we iterate through all of them seeing
//if we can open them or if we fail to open them, get an access denied or general error error.
//Both of these cases indicate that there is a COM port at that number.
for (UINT i = 1; i<256; i++)
{
//Form the Raw device name
CString sPort;
sPort.Format(_T("\\\\.\\COM%d"), i);
//Try to open the port
BOOL bSuccess = FALSE;
HANDLE hPort = ::CreateFile(sPort, GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, 0, 0);
if (hPort == INVALID_HANDLE_VALUE)
{
DWORD dwError = GetLastError();
//Check to see if the error was because some other app had the port open or a general failure
if (dwError == ERROR_ACCESS_DENIED || dwError == ERROR_GEN_FAILURE)
bSuccess = TRUE;
}
else {
bSuccess = TRUE; //The port was opened successfully
CloseHandle(hPort); //Don't forget to close the port, since we are going to do nothing with it anyway
}
if (bSuccess) ports.Add(i); //Add the port number to the array which will be returned
}
}
}
1、将SerialPort.h和SerialPort.cpp文件复制到项目中

1、头文件添加现有项:SerialPort.h

1、源文件添加现有项:SerialPort.cpp
1、MyComTestDlg.h:创建串口SerialPort类:记得头文件
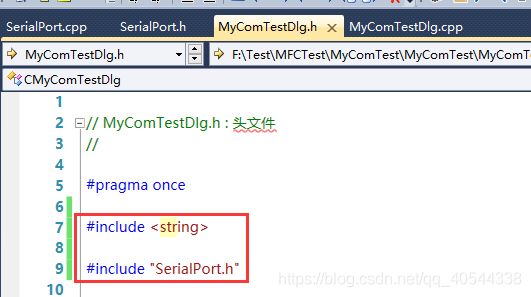

#include
#include "SerialPort.h" public:
CSerialCom m_SerialPort;//串口接收端口号
BOOL m_bSerialPortOpened;//串口接收端:是否打开
CSerialCom m_SerialPortsend;//串口发送端端口号
BOOL m_bSerialPortOpenedsend;//串口发送端:是否打开
int comMessageLength;//串口信号长度
std::string str;//串口输入的信息
//void ReadConfig();//读取配置文件
int comPortReceive,comPortSend;//端口号
1、创建编辑框:显示外面发送来的串口信息:名字叫做:IDC_EDIT1

1、添加MFC相应消息事件:为了方便得到外面的信息:(因为我没有找到类向导之类直接导入这个事件的方法,直接填写代码也可以实现同样的功能)
①注意:如果报错
![]()
则:将LONG改为LRESULT
①头文件中:

afx_msg LONG OnComm(WPARAM ch,LPARAM port);//自己手动添加的一个消息处理函数:为了有消息给MFC发送后,MFC有变化
//afx_msg LRESULT OnComm(WPARAM ch,LPARAM port);//LONG报错就使用LRESULT,自己手动添加的一个消息处理函数,为了有消息给MFC发送后,MFC有变化②源文件中:
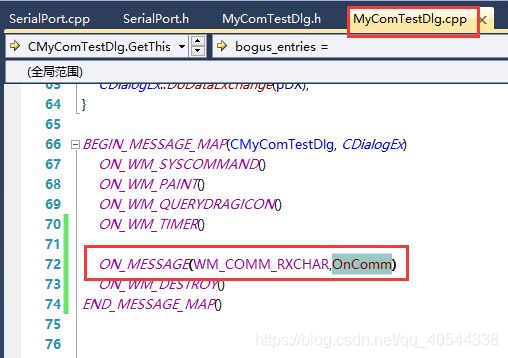
ON_MESSAGE(WM_COMM_RXCHAR,OnComm)
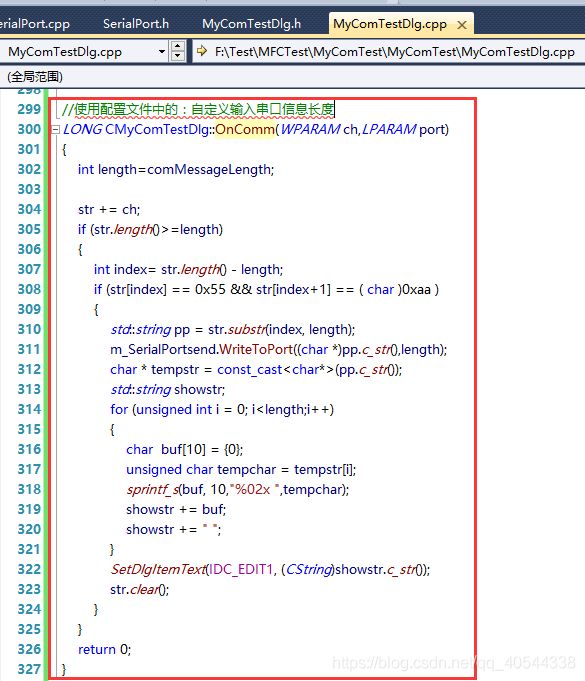
//使用配置文件中的:自定义输入串口信息长度
//LRESULT CFlashAndVideoDlg::OnComm(WPARAM ch,LPARAM port)//LONG报错就使用LRESULT,自己手动添加的一个消息处理函数,为了有消息给MFC发送后,MFC有变化
LONG CFlashAndVideoDlg::OnComm(WPARAM ch,LPARAM port)
{
int length=comMessageLength;
str += ch;
if (str.length()>=length)
{
int index= str.length() - length;
if (str[index] == 0x55 && str[index+1] == ( char )0xaa )
{
std::string pp = str.substr(index, length);
m_SerialPortsend.WriteToPort((char *)pp.c_str(),length);
char * tempstr = const_cast(pp.c_str());
std::string showstr;
for (unsigned int i = 0; i
1、初始化:串口类:MyComTestDlg.cpp:OnInitDialog()中
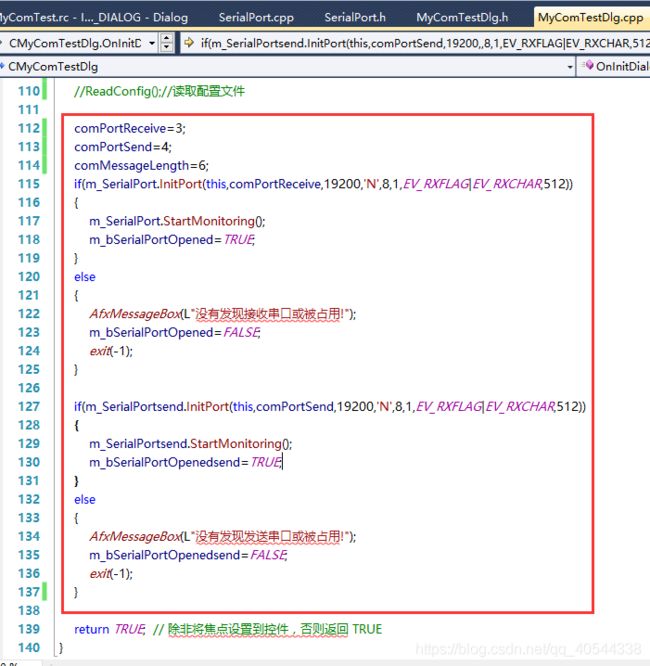
comPortReceive=3;
comPortSend=4;
comMessageLength=6;
if(m_SerialPort.InitPort(this,comPortReceive,19200,'N',8,1,EV_RXFLAG|EV_RXCHAR,512))
{
m_SerialPort.StartMonitoring();
m_bSerialPortOpened=TRUE;
}
else
{
AfxMessageBox(L"没有发现接收串口或被占用!");
m_bSerialPortOpened=FALSE;
exit(-1);
}
if(m_SerialPortsend.InitPort(this,comPortSend,19200,'N',8,1,EV_RXFLAG|EV_RXCHAR,512))
{
m_SerialPortsend.StartMonitoring();
m_bSerialPortOpenedsend=TRUE;
}
else
{
AfxMessageBox(L"没有发现发送串口或被占用!");
m_bSerialPortOpenedsend=FALSE;
exit(-1);
}
1、注销和关闭串口:

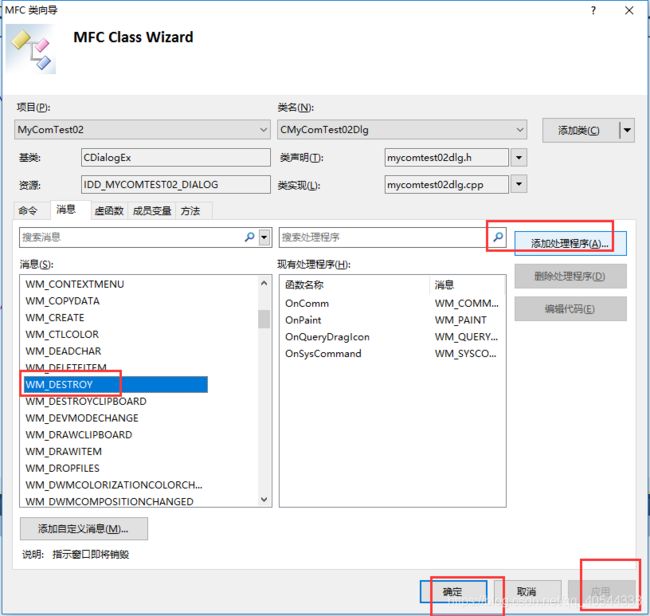
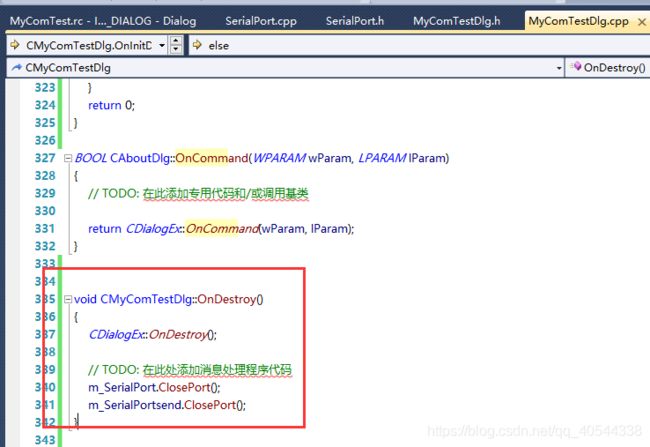
void CMyComTestDlg::OnDestroy()
{
CDialogEx::OnDestroy();
// TODO: 在此处添加消息处理程序代码
m_SerialPort.ClosePort();
m_SerialPortsend.ClosePort();
}