【caffe】c++中使用训练好的caffe模型,classification工程生成动态链接库——【caffe学习六】
除了在opencv dnn中使用训练好的model,还可以直接通过classification.exe去查看单张图的训练结果。
但是我在使用opencv dnn的时候,发现里面输出的结果和classification.exe并不一样,一时找不到原因,于是还是考虑将classification.cpp写成库供别的程序调用。
1.配置环境。新建工程切换到release x64下
①项目属性中——配置属性——C/C++——常规:
D:\caffe\scripts\build\include;
D:\caffe\scripts\build;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\include\boost-1_61;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\include;
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\include;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\include\opencv;
D:\caffe\include;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\Include;%(AdditionalIncludeDirectories)②项目属性中——配置属性——C/C++——预处理器:
WIN32;
_WINDOWS;
NDEBUG;
CAFFE_VERSION=1.0.0;
BOOST_ALL_NO_LIB;
USE_LMDB;
USE_LEVELDB;
USE_CUDNN;
USE_OPENCV;
CMAKE_WINDOWS_BUILD;
GLOG_NO_ABBREVIATED_SEVERITIES;
GOOGLE_GLOG_DLL_DECL=__declspec(dllimport);
GOOGLE_GLOG_DLL_DECL_FOR_UNITTESTS=__declspec(dllimport);
H5_BUILT_AS_DYNAMIC_LIB=1;
CMAKE_INTDIR="Release";
%(PreprocessorDefinitions)③项目属性中——配置属性——链接器——输入——附加依赖项:
D:\caffe\scripts\build\lib\Release\caffe.lib;
D:\caffe\scripts\build\lib\Release\caffeproto.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\boost_system-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\boost_thread-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\boost_filesystem-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\boost_chrono-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\boost_date_time-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\boost_atomic-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\glog.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\Lib\gflags.lib;
shlwapi.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\libprotobuf.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\caffehdf5_hl.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\caffehdf5.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\cmake\..\lib\caffezlib.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\lmdb.lib;
ntdll.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\leveldb.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\cmake\..\lib\boost_date_time-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\cmake\..\lib\boost_filesystem-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\cmake\..\lib\boost_system-vc140-mt-1_61.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\snappy_static.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\caffezlib.lib;
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\lib\x64\cudart.lib;
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\lib\x64\curand.lib;
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\lib\x64\cublas.lib;
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\lib\x64\cublas_device.lib;
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\lib\x64\cudnn.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\x64\vc14\lib\opencv_highgui310.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\x64\vc14\lib\opencv_imgcodecs310.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\x64\vc14\lib\opencv_imgproc310.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\x64\vc14\lib\opencv_core310.lib;
C:\Users\machenike\.caffe\dependencies\libraries_v140_x64_py27_1.1.0\libraries\lib\libopenblas.dll.a;
kernel32.lib;
user32.lib;
gdi32.lib;
winspool.lib;
shell32.lib;
ole32.lib;
oleaut32.lib;
uuid.lib;
comdlg32.lib;
advapi32.lib④项目属性中——配置属性——链接器——输入——忽略特定默认库:
%(IgnoreSpecificDefaultLibraries)⑤复制D:\caffe\scripts\build\tools\Release所有的dll到工程Release下
以上①②③④其实都可以在D:\caffe\scripts\build\Caffe.sln中找到
⑥复制classification需要的5个文件,分别是deploy.prototxt network.caffemodel mean.binaryproto labels.txt img.jpg到工程下(你的不一定是这个文件名)
2.复制源码。
从Caffe.sln中可以找到classification.cpp的源码,全选复制修改输入,修改后如下
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace caffe; // NOLINT(build/namespaces)
using std::string;
/* Pair (label, confidence) representing a prediction. */
typedef std::pair Prediction;
class Classifier {
public:
Classifier(const string& model_file,
const string& trained_file,
const string& mean_file,
const string& label_file);
std::vector Classify(const cv::Mat& img, int N = 5);
private:
void SetMean(const string& mean_file);
std::vector Predict(const cv::Mat& img);
void WrapInputLayer(std::vector* input_channels);
void Preprocess(const cv::Mat& img,
std::vector* input_channels);
private:
shared_ptr > net_;
cv::Size input_geometry_;
int num_channels_;
cv::Mat mean_;
std::vector labels_;
};
Classifier::Classifier(const string& model_file,
const string& trained_file,
const string& mean_file,
const string& label_file) {
#ifdef CPU_ONLY
Caffe::set_mode(Caffe::CPU);
#else
Caffe::set_mode(Caffe::GPU);
#endif
/* Load the network. */
net_.reset(new Net(model_file, TEST));
net_->CopyTrainedLayersFrom(trained_file);
CHECK_EQ(net_->num_inputs(), 1) << "Network should have exactly one input.";
CHECK_EQ(net_->num_outputs(), 1) << "Network should have exactly one output.";
Blob* input_layer = net_->input_blobs()[0];
num_channels_ = input_layer->channels();
CHECK(num_channels_ == 3 || num_channels_ == 1)
<< "Input layer should have 1 or 3 channels.";
input_geometry_ = cv::Size(input_layer->width(), input_layer->height());
/* Load the binaryproto mean file. */
SetMean(mean_file);
/* Load labels. */
std::ifstream labels(label_file.c_str());
CHECK(labels) << "Unable to open labels file " << label_file;
string line;
while (std::getline(labels, line))
labels_.push_back(string(line));
Blob* output_layer = net_->output_blobs()[0];
CHECK_EQ(labels_.size(), output_layer->channels())
<< "Number of labels is different from the output layer dimension.";
}
static bool PairCompare(const std::pair& lhs,
const std::pair& rhs) {
return lhs.first > rhs.first;
}
/* Return the indices of the top N values of vector v. */
static std::vector Argmax(const std::vector& v, int N) {
std::vector > pairs;
for (size_t i = 0; i < v.size(); ++i)
pairs.push_back(std::make_pair(v[i], static_cast(i)));
std::partial_sort(pairs.begin(), pairs.begin() + N, pairs.end(), PairCompare);
std::vector result;
for (int i = 0; i < N; ++i)
result.push_back(pairs[i].second);
return result;
}
/* Return the top N predictions. */
std::vector Classifier::Classify(const cv::Mat& img, int N) {
std::vector output = Predict(img);
N = std::min(labels_.size(), N);
std::vector maxN = Argmax(output, N);
std::vector predictions;
for (int i = 0; i < N; ++i) {
int idx = maxN[i];
predictions.push_back(std::make_pair(labels_[idx], output[idx]));
}
return predictions;
}
/* Load the mean file in binaryproto format. */
void Classifier::SetMean(const string& mean_file) {
BlobProto blob_proto;
ReadProtoFromBinaryFileOrDie(mean_file.c_str(), &blob_proto);
/* Convert from BlobProto to Blob */
Blob mean_blob;
mean_blob.FromProto(blob_proto);
CHECK_EQ(mean_blob.channels(), num_channels_)
<< "Number of channels of mean file doesn't match input layer.";
/* The format of the mean file is planar 32-bit float BGR or grayscale. */
std::vector channels;
float* data = mean_blob.mutable_cpu_data();
for (int i = 0; i < num_channels_; ++i) {
/* Extract an individual channel. */
cv::Mat channel(mean_blob.height(), mean_blob.width(), CV_32FC1, data);
channels.push_back(channel);
data += mean_blob.height() * mean_blob.width();
}
/* Merge the separate channels into a single image. */
cv::Mat mean;
cv::merge(channels, mean);
/* Compute the global mean pixel value and create a mean image
* filled with this value. */
cv::Scalar channel_mean = cv::mean(mean);
mean_ = cv::Mat(input_geometry_, mean.type(), channel_mean);
}
std::vector Classifier::Predict(const cv::Mat& img) {
Blob* input_layer = net_->input_blobs()[0];
input_layer->Reshape(1, num_channels_,
input_geometry_.height, input_geometry_.width);
/* Forward dimension change to all layers. */
net_->Reshape();
std::vector input_channels;
WrapInputLayer(&input_channels);
Preprocess(img, &input_channels);
net_->Forward();
/* Copy the output layer to a std::vector */
Blob* output_layer = net_->output_blobs()[0];
const float* begin = output_layer->cpu_data();
const float* end = begin + output_layer->channels();
return std::vector(begin, end);
}
/* Wrap the input layer of the network in separate cv::Mat objects
* (one per channel). This way we save one memcpy operation and we
* don't need to rely on cudaMemcpy2D. The last preprocessing
* operation will write the separate channels directly to the input
* layer. */
void Classifier::WrapInputLayer(std::vector* input_channels) {
Blob* input_layer = net_->input_blobs()[0];
int width = input_layer->width();
int height = input_layer->height();
float* input_data = input_layer->mutable_cpu_data();
for (int i = 0; i < input_layer->channels(); ++i) {
cv::Mat channel(height, width, CV_32FC1, input_data);
input_channels->push_back(channel);
input_data += width * height;
}
}
void Classifier::Preprocess(const cv::Mat& img,
std::vector* input_channels) {
/* Convert the input image to the input image format of the network. */
cv::Mat sample;
if (img.channels() == 3 && num_channels_ == 1)
cv::cvtColor(img, sample, cv::COLOR_BGR2GRAY);
else if (img.channels() == 4 && num_channels_ == 1)
cv::cvtColor(img, sample, cv::COLOR_BGRA2GRAY);
else if (img.channels() == 4 && num_channels_ == 3)
cv::cvtColor(img, sample, cv::COLOR_BGRA2BGR);
else if (img.channels() == 1 && num_channels_ == 3)
cv::cvtColor(img, sample, cv::COLOR_GRAY2BGR);
else
sample = img;
cv::Mat sample_resized;
if (sample.size() != input_geometry_)
cv::resize(sample, sample_resized, input_geometry_);
else
sample_resized = sample;
cv::Mat sample_float;
if (num_channels_ == 3)
sample_resized.convertTo(sample_float, CV_32FC3);
else
sample_resized.convertTo(sample_float, CV_32FC1);
cv::Mat sample_normalized;
cv::subtract(sample_float, mean_, sample_normalized);
/* This operation will write the separate BGR planes directly to the
* input layer of the network because it is wrapped by the cv::Mat
* objects in input_channels. */
cv::split(sample_normalized, *input_channels);
CHECK(reinterpret_cast(input_channels->at(0).data)
== net_->input_blobs()[0]->cpu_data())
<< "Input channels are not wrapping the input layer of the network.";
}
int main()
{
::google::InitGoogleLogging("init");
string model_file = "bvlc_googlenet_iter_5000.prototxt";
string trained_file = "bvlc_googlenet_iter_5000.caffemodel";
string mean_file = "imagenet_mean.binaryproto";
string label_file = "synset_words.txt";
Classifier classifier(model_file, trained_file, mean_file, label_file);
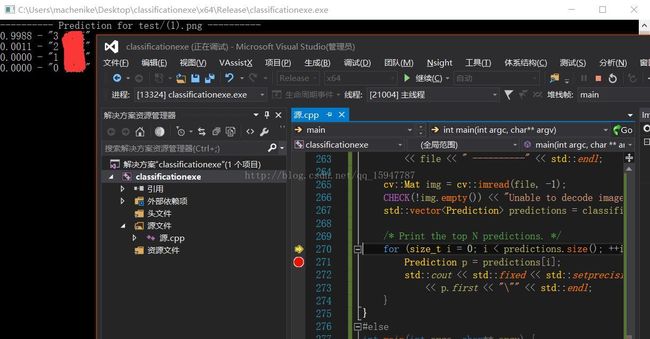
string file = "test/(1).png";
std::cout << "---------- Prediction for "
<< file << " ----------" << std::endl;
cv::Mat img = cv::imread(file, -1);
CHECK(!img.empty()) << "Unable to decode image " << file;
std::vector predictions = classifier.Classify(img);
/* Print the top N predictions. */
for (size_t i = 0; i < predictions.size(); ++i) {
Prediction p = predictions[i];
std::cout << std::fixed << std::setprecision(4) << p.second << " - \""
<< p.first << "\"" << std::endl;
}
}
4.写成动态链接库供别的程序调用。
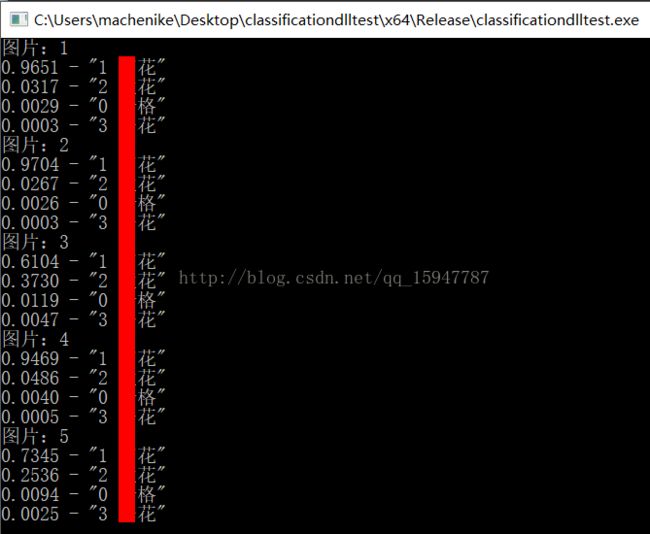
因为我分4类,一般都是直接返回相似度最大的那类,但是我还是想看以下别的类的信息,所以把每一类的相似度都返回。
于是修改上面源码为:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace caffe; // NOLINT(build/namespaces)
using std::string;
/* Pair (label, confidence) representing a prediction. */
typedef std::pair Prediction;
class Classifier {
public:
Classifier();
Classifier(const string& model_file,
const string& trained_file,
const string& mean_file,
const string& label_file);
void ClassifierInit(const string& model_file,
const string& trained_file,
const string& mean_file,
const string& label_file);
std::vector Classify(const cv::Mat& img, int N = 5);
private:
void SetMean(const string& mean_file);
std::vector Predict(const cv::Mat& img);
void WrapInputLayer(std::vector* input_channels);
void Preprocess(const cv::Mat& img,
std::vector* input_channels);
private:
shared_ptr > net_;
cv::Size input_geometry_;
int num_channels_;
cv::Mat mean_;
std::vector labels_;
};
Classifier::Classifier()
{
}
Classifier::Classifier(const string& model_file,
const string& trained_file,
const string& mean_file,
const string& label_file) {
#ifdef CPU_ONLY
Caffe::set_mode(Caffe::CPU);
#else
Caffe::set_mode(Caffe::GPU);
#endif
/* Load the network. */
net_.reset(new Net(model_file, TEST));
net_->CopyTrainedLayersFrom(trained_file);
CHECK_EQ(net_->num_inputs(), 1) << "Network should have exactly one input.";
CHECK_EQ(net_->num_outputs(), 1) << "Network should have exactly one output.";
Blob* input_layer = net_->input_blobs()[0];
num_channels_ = input_layer->channels();
CHECK(num_channels_ == 3 || num_channels_ == 1)
<< "Input layer should have 1 or 3 channels.";
input_geometry_ = cv::Size(input_layer->width(), input_layer->height());
/* Load the binaryproto mean file. */
SetMean(mean_file);
/* Load labels. */
std::ifstream labels(label_file.c_str());
CHECK(labels) << "Unable to open labels file " << label_file;
string line;
while (std::getline(labels, line))
labels_.push_back(string(line));
Blob* output_layer = net_->output_blobs()[0];
CHECK_EQ(labels_.size(), output_layer->channels())
<< "Number of labels is different from the output layer dimension.";
}
void Classifier::ClassifierInit(const string& model_file,
const string& trained_file,
const string& mean_file,
const string& label_file) {
#ifdef CPU_ONLY
Caffe::set_mode(Caffe::CPU);
#else
Caffe::set_mode(Caffe::GPU);
#endif
/* Load the network. */
net_.reset(new Net(model_file, TEST));
net_->CopyTrainedLayersFrom(trained_file);
CHECK_EQ(net_->num_inputs(), 1) << "Network should have exactly one input.";
CHECK_EQ(net_->num_outputs(), 1) << "Network should have exactly one output.";
Blob* input_layer = net_->input_blobs()[0];
num_channels_ = input_layer->channels();
CHECK(num_channels_ == 3 || num_channels_ == 1)
<< "Input layer should have 1 or 3 channels.";
input_geometry_ = cv::Size(input_layer->width(), input_layer->height());
/* Load the binaryproto mean file. */
SetMean(mean_file);
/* Load labels. */
std::ifstream labels(label_file.c_str());
CHECK(labels) << "Unable to open labels file " << label_file;
string line;
while (std::getline(labels, line))
labels_.push_back(string(line));
Blob* output_layer = net_->output_blobs()[0];
CHECK_EQ(labels_.size(), output_layer->channels())
<< "Number of labels is different from the output layer dimension.";
}
static bool PairCompare(const std::pair& lhs,
const std::pair& rhs) {
return lhs.first > rhs.first;
}
/* Return the indices of the top N values of vector v. */
static std::vector Argmax(const std::vector& v, int N) {
std::vector > pairs;
for (size_t i = 0; i < v.size(); ++i)
pairs.push_back(std::make_pair(v[i], static_cast(i)));
std::partial_sort(pairs.begin(), pairs.begin() + N, pairs.end(), PairCompare);
std::vector result;
for (int i = 0; i < N; ++i)
result.push_back(pairs[i].second);
return result;
}
/* Return the top N predictions. */
std::vector Classifier::Classify(const cv::Mat& img, int N) {
std::vector output = Predict(img);
N = std::min(labels_.size(), N);
std::vector maxN = Argmax(output, N);
std::vector predictions;
for (int i = 0; i < N; ++i) {
int idx = maxN[i];
predictions.push_back(std::make_pair(labels_[idx], output[idx]));
}
return predictions;
}
/* Load the mean file in binaryproto format. */
void Classifier::SetMean(const string& mean_file) {
BlobProto blob_proto;
ReadProtoFromBinaryFileOrDie(mean_file.c_str(), &blob_proto);
/* Convert from BlobProto to Blob */
Blob mean_blob;
mean_blob.FromProto(blob_proto);
CHECK_EQ(mean_blob.channels(), num_channels_)
<< "Number of channels of mean file doesn't match input layer.";
/* The format of the mean file is planar 32-bit float BGR or grayscale. */
std::vector channels;
float* data = mean_blob.mutable_cpu_data();
for (int i = 0; i < num_channels_; ++i) {
/* Extract an individual channel. */
cv::Mat channel(mean_blob.height(), mean_blob.width(), CV_32FC1, data);
channels.push_back(channel);
data += mean_blob.height() * mean_blob.width();
}
/* Merge the separate channels into a single image. */
cv::Mat mean;
cv::merge(channels, mean);
/* Compute the global mean pixel value and create a mean image
* filled with this value. */
cv::Scalar channel_mean = cv::mean(mean);
mean_ = cv::Mat(input_geometry_, mean.type(), channel_mean);
}
std::vector Classifier::Predict(const cv::Mat& img) {
Blob* input_layer = net_->input_blobs()[0];
input_layer->Reshape(1, num_channels_,
input_geometry_.height, input_geometry_.width);
/* Forward dimension change to all layers. */
net_->Reshape();
std::vector input_channels;
WrapInputLayer(&input_channels);
Preprocess(img, &input_channels);
net_->Forward();
/* Copy the output layer to a std::vector */
Blob* output_layer = net_->output_blobs()[0];
const float* begin = output_layer->cpu_data();
const float* end = begin + output_layer->channels();
return std::vector(begin, end);
}
/* Wrap the input layer of the network in separate cv::Mat objects
* (one per channel). This way we save one memcpy operation and we
* don't need to rely on cudaMemcpy2D. The last preprocessing
* operation will write the separate channels directly to the input
* layer. */
void Classifier::WrapInputLayer(std::vector* input_channels) {
Blob* input_layer = net_->input_blobs()[0];
int width = input_layer->width();
int height = input_layer->height();
float* input_data = input_layer->mutable_cpu_data();
for (int i = 0; i < input_layer->channels(); ++i) {
cv::Mat channel(height, width, CV_32FC1, input_data);
input_channels->push_back(channel);
input_data += width * height;
}
}
void Classifier::Preprocess(const cv::Mat& img,
std::vector* input_channels) {
/* Convert the input image to the input image format of the network. */
cv::Mat sample;
if (img.channels() == 3 && num_channels_ == 1)
cv::cvtColor(img, sample, cv::COLOR_BGR2GRAY);
else if (img.channels() == 4 && num_channels_ == 1)
cv::cvtColor(img, sample, cv::COLOR_BGRA2GRAY);
else if (img.channels() == 4 && num_channels_ == 3)
cv::cvtColor(img, sample, cv::COLOR_BGRA2BGR);
else if (img.channels() == 1 && num_channels_ == 3)
cv::cvtColor(img, sample, cv::COLOR_GRAY2BGR);
else
sample = img;
cv::Mat sample_resized;
if (sample.size() != input_geometry_)
cv::resize(sample, sample_resized, input_geometry_);
else
sample_resized = sample;
cv::Mat sample_float;
if (num_channels_ == 3)
sample_resized.convertTo(sample_float, CV_32FC3);
else
sample_resized.convertTo(sample_float, CV_32FC1);
cv::Mat sample_normalized;
cv::subtract(sample_float, mean_, sample_normalized);
/* This operation will write the separate BGR planes directly to the
* input layer of the network because it is wrapped by the cv::Mat
* objects in input_channels. */
cv::split(sample_normalized, *input_channels);
CHECK(reinterpret_cast(input_channels->at(0).data)
== net_->input_blobs()[0]->cpu_data())
<< "Input channels are not wrapping the input layer of the network.";
}
Classifier classifier;
_declspec(dllexport) void initNet(string model_file, string trained_file, string mean_file, string label_file)
{
::google::InitGoogleLogging("init");
classifier.ClassifierInit(model_file, trained_file, mean_file, label_file);
}
//************************************
// Method: RegPic
// FullName: RegPic
// Access: public
// Returns: void
// Qualifier:
// Parameter: int rows
// Parameter: int cols
// Parameter: unsigned __int8 * data 8位单通道,灰度图
// Parameter: float a[4] 4类相似度,也可以修改位返回最大相似度的序号,但是损失了其他信息
//************************************
_declspec(dllexport) void RegPic(int rows, int cols, unsigned __int8 *data, float classPro[4])
{
cv::Mat image(rows, cols, CV_8UC1, &data[0]);//单通道灰度图
if (image.empty())
{
std::cout << "image read error" << std::endl;
return;
}
cv::Mat img;
cvtColor(image, img, CV_GRAY2BGR);
std::vector predictions = classifier.Classify(img);
/* Print the top N predictions. */
for (size_t i = 0; i < predictions.size(); ++i)
{
Prediction p = predictions[i];
std::cout << std::fixed << std::setprecision(4) << p.second << " - \""
<< p.first << "\"" << std::endl;
int classnum = p.first[0] - 48;//类别序号
classPro[classnum] = p.second;
}
}
测试源码:
#include
#include
using namespace std;
using namespace cv;
_declspec(dllexport) void RegPic(int rows, int cols, unsigned __int8 *data, float classPro[4]);
_declspec(dllexport) void initNet(string model_file, string trained_file, string mean_file, string label_file);
void main()
{
string model_file = "bvlc_googlenet_iter_5000.prototxt";
string trained_file = "bvlc_googlenet_iter_5000.caffemodel";
string mean_file = "imagenet_mean.binaryproto";
string label_file = "synset_words.txt";
initNet(model_file, trained_file, mean_file, label_file);//初始化网络,只需要运行一次
for (int i = 0; i < 100; i++)
{
stringstream ss;
ss << "test/(";
ss << i;
ss << ").png";
Mat img = imread(ss.str(), 0);
if (img.empty())
{
continue;
}
float classPro[4];
//0为合格品, 1为X花, 2为XX花, 3为XXX花
cout << "图片:" << i << endl;
RegPic(img.rows, img.cols, img.data, classPro);//识别判断,返回a数组,4个数分别代表四类的相似度最大1最小0
}
}