Matlab最小面积包围四边形
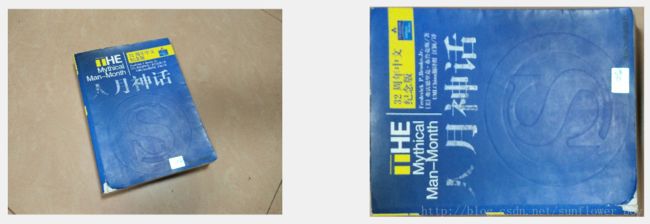
对于存在透视变换的物体,提取时最小面积包围矩形不能满足要求,google到一个求最小面积包围四边形的算法,虽然速度较慢。以提取书本为例,实验结果和代码如下。

booktest.m
I = imread('book1.jpg');
figure(1);
imshow(I);
Ir = I(:,:,1);
Ismall = imresize(Ir,0.25);
bw =~imbinarize(Ismall);
imshow(bw);
bw2 = bwareaopen(bw,1000);
imshow(bw2);
stats = regionprops(bw2,'BoundingBox','ConvexHull');
hold on;
for i=1:numel(stats)
%凸包
h1=impoly(gca,stats(i).ConvexHull);
api = iptgetapi(h1);
api.setColor('red');
%包围矩形
h2=imrect(gca,stats(i).BoundingBox);
api = iptgetapi(h2);
api.setColor('blue');
%包围盒(最小面积包围矩形)
point = stats(i).ConvexHull;
c = minBoundingBox(point');
plot(c(1,[1:end 1]),c(2,[1:end 1]),'g')
%最小面积包围四边形
[qx,qy] = minboundquad(point(:,1),point(:,2));
h3=impoly(gca,[qx',qy']);
api = iptgetapi(h3);
api.setColor('yellow');
end
hold off;
%整理四个点位置
%记最左点为1,同最左的话,靠下为1
% 2
%1
% 3
% 4
quadVetices = [qx(1:4)',qy(1:4)'];
quadVetices = quadVetices .* 4;
[quadVeticesSort,index] = sortrows(quadVetices);
if quadVeticesSort(1,1) == quadVeticesSort(2,1)
if quadVeticesSort(1,2) < quadVeticesSort(2,2)
k = index(1);
else
k = index(2);
end
else
k = index(1);
end
i = mod((k-1):(k+2),4)+1;
rRect = quadVetices(i,:);
%计算边长
len = zeros(4,1);
for i = 1:3
len(i) = sqrt(power(rRect(i,1)-rRect(i+1,1),2)+power(rRect(i,2)-rRect(i+1,2),2));
end
len(4) = sqrt(power(rRect(4,1)-rRect(1,1),2)+power(rRect(4,2)-rRect(1,2),2));
dsth = (len(1)+len(3))/2;
dstw = (len(2)+len(4))/2;
dstRect = [0,dsth;0,0;dstw,0;dstw,dsth;];
%纠正透视变换
tform = estimateGeometricTransform(rRect, dstRect,...
'projective');
imgBp = imwarp(I, tform,...
'OutputView',imref2d([floor(dsth),floor(dstw)]));
imshow(imgBp);
2D minimal bounding box-minBoundingBox()
http://cn.mathworks.com/matlabcentral/fileexchange/31126-2d-minimal-bounding-box?focused=5188215&tab=function
A suite of minimal bounding objects-minboundquad()
http://cn.mathworks.com/matlabcentral/fileexchange/34767-a-suite-of-minimal-bounding-objects?focused=3820662&tab=function
这个代码包中还包含了最小面积包围三角形,包围圆,椭圆等多种形状。
现在总是报警告,暂时没时间细看了
In minboundquad (line 181)
In booktest (line 27)
警告: 矩阵为奇异工作精度。
minboundquad.m
我稍微改了下,
在第125行增加nedges = size(edges,1);
function [qx,qy,quadarea] = minboundquad(x,y)
% minboundquad: Compute the minimum area bounding quadrilateral of points in the plane
% usage: [qx,qy] = minboundquad(x,y)
%
% arguments: (input)
% x,y - vectors of points, describing points in the plane as
% (x,y) pairs. x and y must be the same size.
%
% arguments: (output)
% qx,qy - 5x1 vectors of points that define the minimum
% area bounding quadrilateral.
%
% WARNING: Most 2-d convex hulls are fairly small.
% However, this code will be O(N^4), where N is the
% number of distinct edges in the convex hull of
% your data. So finding the bounding quadrilateral
% of 1000 points around the perimeter of a circle
% will take much time.
%
% Example usage:
% x = randn(50,1);
% y = randn(50,1);
% [qx,qy] = minboundquad(x,y);
% plot(x,y,'ro',qx,qy,'b-')
%
%
% See also: minboundcircle, minboundrect, minboundtri
%
%
% Author: John D'Errico
% E-mail: [email protected]
% Release: 1.0
% Release date: 3/14/07
% preprocess data
x=x(:);
y=y(:);
% not many error checks to worry about
n = length(x);
if n~=length(y)
error('MINBOUNDQUAD:size','x and y must be the same sizes')
end
% start out with the convex hull of the points to
% reduce the problem dramatically. Note that any
% points in the interior of the convex hull are
% never needed, so we drop them.
xy = [x,y];
if n>3
edges = convhull(x,y);
% convhull returns a list of points around
% the perimeter. I prefer the convhulln form,
% where I have an explicit list of edges.
% Make it so.
edges = [edges(1:(end-1)),edges(2:end)];
elseif n==3
% it is a triangle. I don't care how we
% traverse it. Replicate a vertex into
% a quadrilateral.
qx = xy([1 2 3 3 1],1);
qy = xy([1 2 3 3 1],2);
quadarea = polyarea(qx,qy);
return
elseif n==2
% a single edge
qx = xy([1 2 2 2 1],1);
qy = xy([1 2 2 2 1],2);
% no area to be found
quadarea = 0;
return
elseif n==1
% a single point
qx = xy([1 1 1 1 1],1);
qy = xy([1 1 1 1 1],2);
quadarea = 0;
return
else
% empty begets empty
qx = [];
qy = [];
quadarea = 0;
return
end
nedges = size(edges,1);
% now we must find the bounding quadrilateral of those
% that remain.
% special case small numbers of points. If we trip any
% of these cases, then we are done, so return.
if nedges == 3
qx = xy([1 2 3 1],1);
qy = xy([1 2 3 1],2);
return
elseif nedges == 4
qx = xy([1 2 3 4 1],1);
qy = xy([1 2 3 4 1],2);
return
end
% more than 4 points.
% get the angle of each edge of the hull polygon
edgeangles = atan2(xy(edges(:,2),2) - xy(edges(:,1),2), ...
xy(edges(:,2),1) - xy(edges(:,1),1));
% (These next two steps are probably superfluous.)
% work with all positive angles
k = edgeangles < 0;
edgeangles(k) = edgeangles(k) + 2*pi;
% sort the edges into increasing order of angle
[edgeangles,tags] = sort(edgeangles);
edges = edges(tags,:);
% Look for consecutive edges that have the same
% angles. This test will generally only trip if
% the data set has multiple collinear points
% around the perimeter.
angletol = eps*100;
k = diff(edgeangles) < angletol;
edges(k,:) = [];
edgeangles(k) = [];
% there are nchoosek(nedges,4) sets of edges to
% worry about
nedges = size(edges,1);
edgelist = nchoosek(1:nedges,4);
% The edges are now sorted in counter-clockwise
% order around the convex hull. We can toss out any
% combination of edges where the last edge angle
% minus the first is less than 180 degrees
% (i.e., pi radians.)
k = (edgeangles(edgelist(:,4)) - edgeangles(edgelist(:,1)) <= pi);
edgelist(k,:) = [];
% how many edges remain that can form a valid
% quadrilateral?
nquads = size(edgelist,1);
% test each set of 4 edges
quadarea = inf;
qxi = zeros(1,5);
qyi = zeros(1,5);
qx = qxi;
qy = qyi;
for i = 1:nquads
% find the intersections of each consecutive
% pair of edges.
edgeind = edgelist(i,:);
edgesi = edges(edgeind([1 2 3 4 1]),:);
if any(diff(edgeangles(edgeind)) > pi)
% if one of the consecutive angles is too
% large, then this set of edges will be a
% failed quadrilateral.
continue
end
for j = 1:4
% Does this pair of edges share a node from
% the convex hull?
jplus1 = j + 1;
shared = intersect(edgesi(j,:),edgesi(jplus1,:));
if ~isempty(shared)
% there was a shared node between these edges
qxi(j) = xy(shared,1);
qyi(j) = xy(shared,2);
else
% no shared node, so we must find the
% intersection of the edges by extrapolation
% of the lines that contain these edges to
% see where they intersect.
A = xy(edgesi(j,1),:);
B = xy(edgesi(j,2),:);
C = xy(edgesi(jplus1,1),:);
D = xy(edgesi(jplus1,2),:);
% solve for the line parameters that correspond
% to the intersection point
ts = [(A-B)',(D-C)']\(A-C)';
% recover the intersection point
Q = A + (B-A)*ts(1);
qxi(j) = Q(1);
qyi(j) = Q(2);
end
end
% wrap the polygon
qxi(5) = qxi(1);
qyi(5) = qyi(1);
% compute the area. Simplest is to use polyarea.
% I might want to test to see if it is faster
% to compute the area using other methods though.
A_i = polyarea(qxi,qyi);
if (A_i < quadarea)
% keep this one
quadarea = A_i;
qx = qxi;
qy = qyi;
end
% plot the points, the current quad, and the best quad
% plot(xy(:,1),xy(:,2),'ko')
% hold on
% plot([xy(edgesi(1:4,1),1),xy(edgesi(1:4,2),1)]', ...
% [xy(edgesi(1:4,1),2),xy(edgesi(1:4,2),2)]','g*-','linewidth',8)
% plot(qx,qy,'b-',qxi,qyi,'r:')
% hold off
end
% plot the points and the quad
plot(xy(:,1),xy(:,2),'r.',qx,qy,'b-')