(Caffe,LeNet)初始化训练网络(三)
本文地址:http://blog.csdn.net/mounty_fsc/article/details/51090306
1. Solver到Net
在SGDSolver的构造函数中详见本系列博文(二),主要执行了其父类Solver的构造函数,接着执行Solver::Init()函数,在Init()中,有两个函数值得注意:InitTrainNet()和InitTestNets()分别初始化训练网络和测试网络。
1.1 InitTrainNet
首先,ReadNetParamsFromTextFileOrDie(param_.net(), &net_param)把param_.net()(即examples/mnist/lenet_train_test.prototxt)中的信息读入net_param。
其次,net_.reset(new Net重新构建网络,调用Net的构造方法。
然后,在构造方法中执行Net::init(),开始正式创建网络。其主要代码如下:
template <typename Dtype>
void Net::Init(const NetParameter& in_param) {
...
for (int layer_id = 0; layer_id < param.layer_size(); ++layer_id) {
// Setup layer.
const LayerParameter& layer_param = param.layer(layer_id);
// 在这里创建网络层
layers_.push_back(LayerRegistry::CreateLayer(layer_param));
// Figure out this layer's input and output
for (int bottom_id = 0; bottom_id < layer_param.bottom_size(); ++bottom_id) {
const int blob_id = AppendBottom(param, layer_id, bottom_id, &available_blobs, &blob_name_to_idx);
// If a blob needs backward, this layer should provide it.
need_backward |= blob_need_backward_[blob_id];
}
int num_top = layer_param.top_size();
for (int top_id = 0; top_id < num_top; ++top_id) {
AppendTop(param, layer_id, top_id, &available_blobs, &blob_name_to_idx);
}
...
// 在这里配置网络层
layers_[layer_id]->SetUp(bottom_vecs_[layer_id], top_vecs_[layer_id]);
...
}
for (int param_id = 0; param_id < num_param_blobs; ++param_id) {
AppendParam(param, layer_id, param_id);
}
...
} 说明:
- Lenet5在caffe中共有9层,即
param.layer_size()==9,以上代码每一次for循环创建一个网络层 - 每层网络是通过
LayerRegistry::CreateLayer()创建的,类似与Solver的创建(详见本系列博文(二)) - 14行
Net::AppendBottom(),对于layer_id这层,从Net::blob_中取出blob放入该层对应的bottom_vecs_[layer_id]中 - 20行
Net::AppendTop(),对于layer_id这层,创建blob(未包含数据)并放入Net::blob_中 AppendParam中把每层网络的训练参数与网络变量learnable_params_绑定,在lenet中,只有conv1,conv2,ip1,ip2四层有参数,每层分别有参数与偏置参数两项参数,因而learnable_params_的size为8.
1.2 LayerRegistry::CreateLayer
工厂模式new出网络层对象,具体在后边每层详细说明。
1.3 Layer::SetUp
void SetUp(const vector其中,Reshape函数中通过compute_output_shape计算输出blob的函数,
对于Convolution 层,公式如下,其中,input等数均可代表height或者width;dilation默认为1,所以默认kernel_extent=kernel:
output=(input+2∗pad−kernel_extent)stride+1
kernel_extent=dilation∗(kernel−1)+1对于Pooling层,公式如下,其中ceil取下限:
output=ceil(input+2∗pad−kernelstride)+1
注意:Convolution、Pooling整体公式计算相同,但前者取下限(设局不够时舍弃)后者取上限(数据不够时不舍弃)。
1.4 InitTestNets
该部分内容见本系列博文:(Caffe,Lenet5)初始化测试网络(四)。
2 训练网络结构
| 序 | Layer | layer Type Bottom | Blob Top | Blob Top | Blob Shape |
|---|---|---|---|---|---|
| 1 | minst | Data | data&&label | 64 1 28 28 (50176) && 64 (64) | |
| 2 | conv1 | Convolution | data | conv1 | 64 20 24 24 (737280) |
| 3 | pool1 | Pooling | conv1 | pool1 | 64 20 12 12 (184320) |
| 4 | conv2 | Convolution | pool1 | conv2 | 64 50 8 8 (204800) |
| 5 | pool2 | Pooling | conv2 | pool2 | 64 50 4 4 (51200) |
| 6 | ip1 | InnerProduct | pool2 | ip1 | 64 500 (32000) |
| 7 | relu1 | ReLU | ip1 | ip1(in-place) | 64 500 (32000) |
| 8 | ip2 | InnerProduct | ip1 | ip2 | 64 10 (640) |
| 9 | loss | SoftmaxWithLoss | ip2&&label | loss | (1) |
注:Top Blob Shape格式为:BatchSize,ChannelSize,Height,Width(Total Count)
网络结构如图所示:

3 第一层:Data Layer
3.1 protobuff定义
训练网络的第一层protobuff定义为:
layer {
name: "mnist"
type: "Data"
top: "data"
top: "label"
include {
phase: TRAIN
}
transform_param {
scale: 0.00390625
}
data_param {
source: "examples/mnist/mnist_train_lmdb"
batch_size: 64
backend: LMDB
}
}3.2 函数LayerRegistry::CreateLayer
第1节中代码第一次通过调用LayerRegistry::CreateLayer()创建了DataLayer类,DataLayer类的继承关系如下图所示,详见[1]:
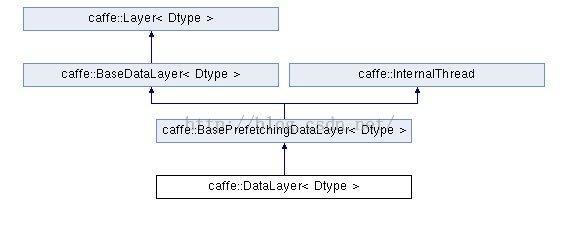
由继承图可知,调用DataLayer()的构造函数,依次执行的顺序为其基类构造函数:Layer()、BaseDataLayer()、InternalThread()(详见(Caffe)基本类InternalThread(三) )、BasePrefetchingDataLayer()、及DataLayer()。
其中,值得注意的是DataLayer(),在调用基类构造函数BasePrefetchingDataLayer()之后,对 DataReader reader_ 进行赋值,在该DataLayer对象中维护了一个DataReader对象reader_,其作用是添加读取数据任务至,一个专门读取数据库(examples/mnist/mnist_train_lmdb)的线程(若还不存在该线程,则创建该线程),此处一共取出了4*64个样本至BlockingQueue。详见(Caffe)基本类DataReader、QueuePair、Body(四)
template type>
DataLayertype>::DataLayer(const LayerParameter& param)
: BasePrefetchingDataLayertype>(param),
reader_(param) {
} 3.3 函数Layer::SetUp
- 此处按程序执行顺序值得关注的有:
在DataLayer::DataLayerSetUp中根据3.2DataReader中介绍的读取的数据中取出一个样本推测blob的形状 BasePrefetchingDataLayer::LayerSetUp如下代码prefetch_[i].data_.mutable_cpu_data()用到了涉及到gpu、cpu间复制数据的问题,见(Caffe)基本类Blob,Layer,Net(一)1.4SyncedMemory及引用[2]// Before starting the prefetch thread, we make cpu_data and gpu_data // calls so that the prefetch thread does not accidentally make simultaneous // cudaMalloc calls when the main thread is running. In some GPUs this // seems to cause failures if we do not so. for (int i = 0; i < PREFETCH_COUNT; ++i) { prefetch_[i].data_.mutable_cpu_data(); if (this->output_labels_) { prefetch_[i].label_.mutable_cpu_data(); } }BasePrefetchingDataLayer类继承了InternalThread,BasePrefetchingDataLayer中通过调用::LayerSetUp StartInternalThread()开启了一个新线程,从而执行BasePrefetchingDataLayer::InternalThreadEntryBasePrefetchingDataLayer::InternalThreadEntry关键代码如下,其中load_batch(batch)为,从2.2介绍的BlockingQueue(包含从数据库读出的数据)中读取一个batch_size的数据到BlockingQueue中。由于该线程在prefetch_free_为空时将挂起等待(PREFETCH_COUNT=3),prefetch_full_中用完的Batch将放回prefetch_free_中。该线程何时停止?while (!must_stop()) { Batch<Dtype>* batch = prefetch_free_.pop(); load_batch(batch); #ifndef CPU_ONLY if (Caffe::mode() == Caffe::GPU) { batch->data_.data().get()->async_gpu_push(stream); CUDA_CHECK(cudaStreamSynchronize(stream)); } #endif prefetch_full_.push(batch); }
关于线程的总结:
- 此外一共涉及到两个线程,分别为都是继承了
InnerThread的BasePrefetchingDataLayer(DataLayer)类和DataReader中的Body类 Body为面向数据库的线程,不断从某个数据库中读出数据,存放至缓存为队列DataReader::QueuePair::BlockingQueue,一般保存4*64个单位数据,单位为DatumBasePrefetchingDataLayer为面向网络的线程,从Body的缓存中不断读取数据。BasePrefetchingDataLayer的缓存为队列BlockingQueue,一般存放3个单位的数据,单位为Batch
static const int PREFETCH_COUNT = 3;
Batch prefetch_[PREFETCH_COUNT];
BlockingQueue*> prefetch_free_;
BlockingQueue*> prefetch_full_;
template <typename Dtype>
BasePrefetchingDataLayer::BasePrefetchingDataLayer(
const LayerParameter& param)
: BaseDataLayer(param),
prefetch_free_(), prefetch_full_() {
for (int i = 0; i < PREFETCH_COUNT; ++i) {
prefetch_free_.push(&prefetch_[i]);
}
} prefetch_full_与prefetch_free_中的元素由prefetch_提供
4 第二层:Convolution Layer
4.1 protobuff定义
layer {
name: "conv1"
type: "Convolution"
bottom: "data"
top: "conv1"
param {
lr_mult: 1
}
param {
lr_mult: 2
}
convolution_param {
num_output: 20
kernel_size: 5
stride: 1
weight_filler {
type: "xavier"
}
bias_filler {
type: "constant"
}
}
}4.2 函数LayerRegistry::CreateLayer
说明:
- 不像DataLayer 直接执行的是构造函数,此时执行的是
GetConvolutuionLayer(),然后调用ConvolutionLayer(),原因如下:
REGISTER_LAYER_CREATOR(Convolution, GetConvolutionLayer);
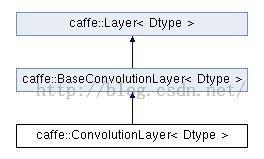
4.3 Layer::SetUp
在`Layer::SetUp`中,调用了`ConvolutionLayer`的基类`BaseConvolutionLayer`的`LayerSetUp及Reshape`函数,该类的主要成员变量如下:/**
* @brief Abstract base class that factors out the BLAS code common to
* ConvolutionLayer and DeconvolutionLayer.
*/
template <typename Dtype>
class BaseConvolutionLayer : public Layer {
public:
explicit BaseConvolutionLayer(const LayerParameter& param)
: Layer(param) {}
virtual void LayerSetUp(const vector - LayerSetUp函数中,主要是初始化了kernel_shape_、stride_、pad_、dilation_以及初始化网络参数,并存放与Layer::blobs_中。
- Reshape函数中,conv_input_shape_、bottom_shape_等
5 第三层:Pooling Layer
5.1 protobuff定义
layer {
name: "pool1"
type: "Pooling"
bottom: "conv1"
top: "pool1"
pooling_param {
pool: MAX
kernel_size: 2
stride: 2
}
}5.2 Layer::SetUp
通过调用虚函数LayerSetUp及Reshape对以下成员变量进行初始化
/**
* @brief Pools the input image by taking the max, average, etc. within regions.
*
* TODO(dox): thorough documentation for Forward, Backward, and proto params.
*/
template
class PoolingLayer : public Layer {
....
int kernel_h_, kernel_w_;
int stride_h_, stride_w_;
int pad_h_, pad_w_;
int channels_;
int height_, width_;
int pooled_height_, pooled_width_;
bool global_pooling_;
Blob rand_idx_;
Blob<int> max_idx_;
}; 6 第四层、第五层
基本同第二层、第三层
7 第六层:InnerProduct Layer
7.1 protobuff定义
layer {
name: "ip1"
type: "InnerProduct"
bottom: "pool2"
top: "ip1"
param {
lr_mult: 1
}
param {
lr_mult: 2
}
inner_product_param {
num_output: 500
weight_filler {
type: "xavier"
}
bias_filler {
type: "constant"
}
}
}7.2 Layer::SetUp
/**
* @brief Also known as a "fully-connected" layer, computes an inner product
* with a set of learned weights, and (optionally) adds biases.
*
* TODO(dox): thorough documentation for Forward, Backward, and proto params.
*/
template
class InnerProductLayer : public Layer {
...
int M_;
int K_;
int N_;
bool bias_term_;
Blob bias_multiplier_;
}; 说明:
- N_为输出大小,即等于
protobuff中定义的num_output - K_为输入大小,对于该层
Bottom Blob形状为(N, C, H, W),N为batch_size,K_=C*H*W(Caffe)基本类Blob,Layer,Net(一),M_=N。其中只有C、H、W跟内积相关
8 第七层:ReLU Layer
8.1 protobuff定义
layer {
name: "relu1"
type: "ReLU"
bottom: "ip1"
top: "ip1"
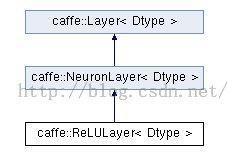
}8.2 说明
ReLULayer主要是用来做计算的,其继承关系如下,详细参加[4]、[5]
9 第八层:InnerProduct Layer
参见第7节
10 第九层:SoftmaxWithLoss Layer
10.1 protobuff定义
layer {
name: "loss"
type: "SoftmaxWithLoss"
bottom: "ip2"
bottom: "label"
top: "loss"
}10.2 LayerRegistry::CreateLayer

10.3 Layer::SetUp
值得注意的是:
- 类
SoftmaxWithLossLayer包含类SoftmaxLayer的实例
shared_ptr softmax_layer_在LayerSetUp中赋值。- 此函数内调用Layer::SetLossWeights初始化了该层的Top Blob(loss)
两个类间的关系如下图:
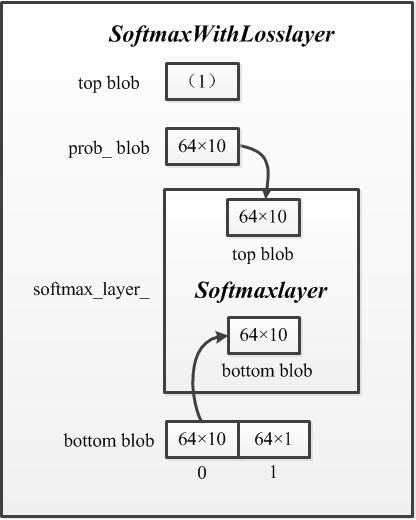
成员变量prob_作为Softmaxlayer的top blob
- bottom blob[0]作为softmaxlayer的bottom blob
- 所以经过softmaxlayer计算之后,得出64*10(每个样本的每个类别上的概率)存放在prob_中
11 剩余的工作
至此,训练网络基本创建完毕,接下来剩下的工作主要有:
- 反向检查一次网络,看哪些blobs会对loss产生影响,在LeNet5中,前面的9层均有影响
- 初始化权值共享
[1].http://caffe.berkeleyvision.org/doxygen/classcaffe_1_1BasePrefetchingDataLayer.html
[2].http://caffe.berkeleyvision.org/tutorial/net_layer_blob.html Implementation Details
[3].http://caffe.berkeleyvision.org/doxygen/classcaffe_1_1ConvolutionLayer.html
[4].http://caffe.berkeleyvision.org/doxygen/classcaffe_1_1ReLULayer.html
[5].http://caffe.berkeleyvision.org/tutorial/layers.html ReLU / Rectified-Linear and Leaky-ReLU