LED跑马灯-库函数
一,GPIO知识回顾
1,四种输入模式:
输入浮空
输入上拉
输入下拉
模拟输入
2,四种输出模式:
开漏输出
开漏复用输出
推挽输出
推挽复用输出
3,三种最大输出速度
2MHz
10MHz
50MHz
每组GPIO共16个IO口,含下7个寄存器
GPIOx_CRL : 端口配置低寄存器
GPIOx_CRH : 端口配置高寄存器
GPIOx_IDR : 端口输入寄存器
GPIOx_ODR : 端口输出寄存器
GPIOx_BSRR : 端口位设置/清除寄存器
GPIOx_BRR : 端口位清除寄存器
GPIOx_LCKR : 端口配置锁存寄存器
二,LED硬件连接:
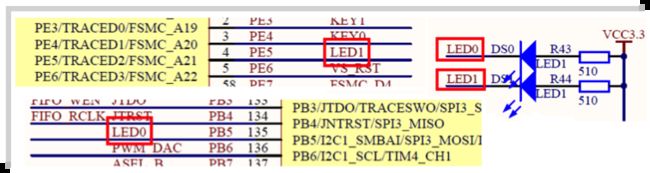
LED0连接PB5引脚
LED1连接PE5引脚
三,LED跑马灯实现流程
1,使能GPIO时钟
使用IO口前先要使能相应的GPIO时钟
2,初始化IO口 GPIO_Init()
配置IO口的引脚工作方式(最大速度,输入/输出模式)
3,操作IO口输出高低电平
控制响应IO口输出高电平或低电平
四,源码分析
1,GPIO初始化函数
stm32f10x_gpio.h头文件中找到GPIO_Init函数声明
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);stm32f10x_gpio.c中找到GPIO_Init函数的实现
/**
* @brief Initializes the GPIOx peripheral according to the specified
* parameters in the GPIO_InitStruct.
* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.
* @param GPIO_InitStruct: pointer to a GPIO_InitTypeDef structure that
* contains the configuration information for the specified GPIO peripheral.
* @retval None
*/
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_MODE(GPIO_InitStruct->GPIO_Mode));
assert_param(IS_GPIO_PIN(GPIO_InitStruct->GPIO_Pin));
/*---------------------------- GPIO Mode Configuration -----------------------*/
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
/* Check the parameters */
assert_param(IS_GPIO_SPEED(GPIO_InitStruct->GPIO_Speed));
/* Output mode */
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*---------------------------- GPIO CRL Configuration ------------------------*/
/* Configure the eight low port pins */
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
tmpreg = GPIOx->CRL;
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = ((uint32_t)0x01) << pinpos;
/* Get the port pins position */
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
if (currentpin == pos)
{
pos = pinpos << 2;
/* Clear the corresponding low control register bits */
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
/* Write the mode configuration in the corresponding bits */
tmpreg |= (currentmode << pos);
/* Reset the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
/* Set the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
GPIOx->CRL = tmpreg;
}
/*---------------------------- GPIO CRH Configuration ------------------------*/
/* Configure the eight high port pins */
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
tmpreg = GPIOx->CRH;
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = (((uint32_t)0x01) << (pinpos + 0x08));
/* Get the port pins position */
currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos);
if (currentpin == pos)
{
pos = pinpos << 2;
/* Clear the corresponding high control register bits */
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
/* Write the mode configuration in the corresponding bits */
tmpreg |= (currentmode << pos);
/* Reset the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
/* Set the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
GPIOx->CRH = tmpreg;
}
}GPIO_Init函数两个入参为GPIO_TypeDef和GPIO_InitTypeDef两个结构体指针
GPIO_TypeDef参数:
stm32f10x.h中找到GPIO_TypeDef结构体声明
/**
* @brief General Purpose I/O
* 定义了GPIO的7个寄存器
*/
typedef struct
{
__IO uint32_t CRL; // 端口配置低寄存器
__IO uint32_t CRH; // 端口配置高寄存器
__IO uint32_t IDR; // 端口输入寄存器
__IO uint32_t ODR; // 端口输出寄存器
__IO uint32_t BSRR; // 端口位设置/清除寄存器
__IO uint32_t BRR; // 端口位清除寄存器
__IO uint32_t LCKR; // 端口配置锁存寄存器
} GPIO_TypeDef;GPIO_TypeDef有效性判断:
/** @defgroup GPIO_Exported_Types
* GPIOA->GPIOG
*/
#define IS_GPIO_ALL_PERIPH(PERIPH) (((PERIPH) == GPIOA) || \
((PERIPH) == GPIOB) || \
((PERIPH) == GPIOC) || \
((PERIPH) == GPIOD) || \
((PERIPH) == GPIOE) || \
((PERIPH) == GPIOF) || \
((PERIPH) == GPIOG))GPIO_InitTypeDef参数:
stm32f10x_gpio.h中找到GPIO_InitTypeDef结构体声明
/**
* @brief GPIO Init structure definition
* GPIO_InitTypeDef结构体-设置IO口,速度,工作模式
*/
typedef struct
{
uint16_t GPIO_Pin; /*!< Specifies the GPIO pins to be configured.
This parameter can be any value of @ref GPIO_pins_define */
GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the speed for the selected pins.
This parameter can be a value of @ref GPIOSpeed_TypeDef */
GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected pins.
This parameter can be a value of @ref GPIOMode_TypeDef */
}GPIO_InitTypeDef;GPIO_InitStruct->GPIO_Speed有效性校验
/**
* @brief Output Maximum frequency selection
*/
typedef enum
{
GPIO_Speed_10MHz = 1,
GPIO_Speed_2MHz,
GPIO_Speed_50MHz
}GPIOSpeed_TypeDef;
#define IS_GPIO_SPEED(SPEED) (((SPEED) == GPIO_Speed_10MHz) || ((SPEED) == GPIO_Speed_2MHz) || \
((SPEED) == GPIO_Speed_50MHz))GPIO_InitStruct->GPIO_Mode有效性校验
/**
* @brief Configuration Mode enumeration
* 八种输入/输出模式
*/
typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入
GPIO_Mode_IPD = 0x28, // 下拉输入
GPIO_Mode_IPU = 0x48, // 上拉输入
GPIO_Mode_Out_OD = 0x14, // 开漏输出
GPIO_Mode_Out_PP = 0x10, // 推挽输出
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出
}GPIOMode_TypeDef;
#define IS_GPIO_MODE(MODE) (((MODE) == GPIO_Mode_AIN) || \
((MODE) == GPIO_Mode_IN_FLOATING) || \
((MODE) == GPIO_Mode_IPD) || \
((MODE) == GPIO_Mode_IPU) || \
((MODE) == GPIO_Mode_Out_PP) || \
((MODE) == GPIO_Mode_AF_OD) || \
((MODE) == GPIO_Mode_AF_PP))GPIO_InitStruct->GPIO_Pin有效性校验
/** @defgroup GPIO_pins_define
* GPIO_Pin_0->GPIO_Pin_15
*/
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< Pin 0 selected */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< Pin 1 selected */
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< Pin 2 selected */
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< Pin 3 selected */
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< Pin 4 selected */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< Pin 5 selected */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< Pin 6 selected */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< Pin 7 selected */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< Pin 8 selected */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< Pin 9 selected */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< Pin 10 selected */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< Pin 11 selected */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< Pin 12 selected */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< Pin 13 selected */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< Pin 14 selected */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< Pin 15 selected */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< All pins selected */
#define IS_GPIO_PIN(PIN) ((((PIN) & (uint16_t)0x00) == 0x00)
&& ((PIN) != (uint16_t)0x00))以初始化PE5为例:
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; // LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); // 根据设定参数初始化GPIOB.52,设置输出电平函数
stm32f10x_gpio.h头文件中找到GPIO_SetBits,GPIO_ResetBits函数声明
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);stm32f10x_gpio.c中找到GPIO_SetBits,GPIO_ResetBits函数的实现
/**
* @brief Sets the selected data port bits.
* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.
* @param GPIO_Pin: specifies the port bits to be written.
* This parameter can be any combination of GPIO_Pin_x where x can be (0..15).
* @retval None
* 作用:设置某个IO口输出为高电平(1)。实际操作BSRR寄存器
*/
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BSRR = GPIO_Pin; // 操作的是BSRR寄存器低16位
}
/**
* @brief Clears the selected data port bits.
* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.
* @param GPIO_Pin: specifies the port bits to be written.
* This parameter can be any combination of GPIO_Pin_x where x can be (0..15).
* @retval None
* 作用:设置某个IO口输出为低电平(0)。实际操作的BRR寄存器。
*/
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BRR = GPIO_Pin; // 操作的是BRR寄存器低16位
}设置IO口输出电平,还有不常用到的两个函数:
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);3,读取输出电平函数
uint8_t GPIO_ReadOutputDataBit (GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
//作用:读取某个GPIO的输出电平。实际操作的是GPIO_ODR寄存器。
//例如:
GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_5);//读取GPIOA.5的输出电平
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
//作用:读取某组GPIO的输出电平。实际操作的是GPIO_ODR寄存器。
//例如:
GPIO_ReadOutputData(GPIOA);//读取GPIOA组中所有io口输出电平4,读取输入电平函数
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
//作用:读取某个GPIO的输入电平。实际操作的是GPIOx_IDR寄存器。
//例如:
GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_5);//读取GPIOA.5的输入电平
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
//作用:读取某组GPIO的输入电平。实际操作的是GPIOx_IDR寄存器。
//例如:
GPIO_ReadInputData(GPIOA);//读取GPIOA组中所有io口输入电平五,LED跑马灯-库函数实现代码
新建LED头文件:HAERWARE->LED->led.h 定义LED初始化函数
#ifndef __LED_H
#define __LED_H
void LED_Init(void);
#endif新建:HAERWARE->LED->led.c 实现LED初始化函数
#include "led.h"
#include "stm32f10x.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//使能GPIOE时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);
//配置PB5
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_5);
//配置PE5
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
}USER->main.c 主函数编写LED跑马灯代码
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
int main(void)
{
delay_init(); // 初始化延时函数
LED_Init(); // 初始化LED
while(1){
GPIO_SetBits(GPIOB, GPIO_Pin_5);
GPIO_SetBits(GPIOE, GPIO_Pin_5);
delay_ms(500);
GPIO_ResetBits(GPIOB, GPIO_Pin_5);
GPIO_ResetBits(GPIOE, GPIO_Pin_5);
delay_ms(500);
}
}