DeepLearing—CV系列(十九)——图像分割之U^2-Net(效果极好)的Pytorch实现
文章目录
- 一、u2net.py
- 二、dataloader.py
- 三、train.py
- 四、test.py
- 五、crop.py
- 六、效果展示
代码目录:
卷积之后特征图计算公式和空洞卷积之后特征图计算公式:
(1)普通卷积之后特征图计算公式:
w=h=(n+2p-k)/s+1
(2)进行空洞卷积后的计算公式:

(3)进行池化后的特征图计算公式:
(n-k)/s+1
一、u2net.py
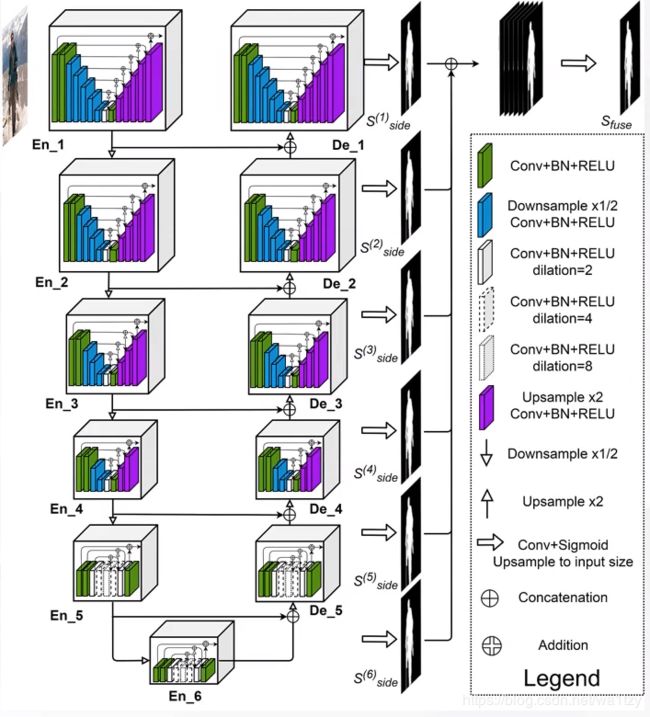
EN_1:2次卷积、5次下采样、1个空洞卷积、5层上采样(每次差值上采样都需要做一次卷积)。
连续池化会造成特征丢失,每做一次池化前都做一次特征图与通道不变的卷积进行特征融合。池化也可以改为步长为2的卷积。
import torch
import torch.nn as nn
from torchvision import models
import torch.nn.functional as F
class REBNCONV(nn.Module):# 卷积块
def __init__(self,in_ch=3,out_ch=3,dirate=1):# 膨胀率
super(REBNCONV,self).__init__()
self.conv_s1 = nn.Conv2d(in_ch,out_ch,3,padding=1*dirate,dilation=1*dirate)
self.bn_s1 = nn.BatchNorm2d(out_ch)
self.relu_s1 = nn.ReLU(inplace=True)
def forward(self,x):
hx = x
xout = self.relu_s1(self.bn_s1(self.conv_s1(hx)))
return xout
## upsample tensor 'src' to have the same spatial size with tensor 'tar'
def _upsample_like(src,tar):
src = F.upsample(src,size=tar.shape[2:],mode='bilinear')
return src
### RSU-7 ###
class RSU7(nn.Module):#UNet07DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU7,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool5 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv7 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv6d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx = self.pool5(hx5)
hx6 = self.rebnconv6(hx)
hx7 = self.rebnconv7(hx6)
hx6d = self.rebnconv6d(torch.cat((hx7,hx6),1))
hx6dup = _upsample_like(hx6d,hx5)
hx5d = self.rebnconv5d(torch.cat((hx6dup,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-6 ###
class RSU6(nn.Module):#UNet06DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU6,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx6 = self.rebnconv6(hx5)
hx5d = self.rebnconv5d(torch.cat((hx6,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-5 ###
class RSU5(nn.Module):#UNet05DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU5,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx5 = self.rebnconv5(hx4)
hx4d = self.rebnconv4d(torch.cat((hx5,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-4 ###
class RSU4(nn.Module):#UNet04DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU4,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx4 = self.rebnconv4(hx3)
hx3d = self.rebnconv3d(torch.cat((hx4,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-4F ###
class RSU4F(nn.Module):#UNet04FRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU4F,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=4)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=8)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=4)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=2)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx2 = self.rebnconv2(hx1)
hx3 = self.rebnconv3(hx2)
hx4 = self.rebnconv4(hx3)
hx3d = self.rebnconv3d(torch.cat((hx4,hx3),1))
hx2d = self.rebnconv2d(torch.cat((hx3d,hx2),1))
hx1d = self.rebnconv1d(torch.cat((hx2d,hx1),1))
return hx1d + hxin
##### U^2-Net ####
class U2NET(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NET,self).__init__()
self.stage1 = RSU7(in_ch,32,64)
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,32,128)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(128,64,256)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(256,128,512)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(512,256,512)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(512,256,512)
# decoder
self.stage5d = RSU4F(1024,256,512)
self.stage4d = RSU4(1024,128,256)
self.stage3d = RSU5(512,64,128)
self.stage2d = RSU6(256,32,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(128,out_ch,3,padding=1)
self.side4 = nn.Conv2d(256,out_ch,3,padding=1)
self.side5 = nn.Conv2d(512,out_ch,3,padding=1)
self.side6 = nn.Conv2d(512,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#-------------------- decoder --------------------
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
#side output
d1 = self.side1(hx1d)
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
return F.sigmoid(d0), F.sigmoid(d1), F.sigmoid(d2), F.sigmoid(d3), F.sigmoid(d4), F.sigmoid(d5), F.sigmoid(d6)
### U^2-Net small ###
class U2NETP(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NETP,self).__init__()
self.stage1 = RSU7(in_ch,16,64)
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,16,64)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(64,16,64)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(64,16,64)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(64,16,64)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(64,16,64)
# decoder
self.stage5d = RSU4F(128,16,64)
self.stage4d = RSU4(128,16,64)
self.stage3d = RSU5(128,16,64)
self.stage2d = RSU6(128,16,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(64,out_ch,3,padding=1)
self.side4 = nn.Conv2d(64,out_ch,3,padding=1)
self.side5 = nn.Conv2d(64,out_ch,3,padding=1)
self.side6 = nn.Conv2d(64,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#decoder
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
#side output
d1 = self.side1(hx1d)
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
return F.sigmoid(d0), F.sigmoid(d1), F.sigmoid(d2), F.sigmoid(d3), F.sigmoid(d4), F.sigmoid(d5), F.sigmoid(d6)
二、dataloader.py
# data loader
from __future__ import print_function, division
import glob
import torch
from skimage import io, transform, color
import numpy as np
import random
import math
import matplotlib.pyplot as plt
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms, utils
from PIL import Image
# ==========================dataset load==========================
class RescaleT(object):
def __init__(self, output_size):
assert isinstance(output_size, (int, tuple))
self.output_size = output_size
def __call__(self, sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
h, w = image.shape[:2]
if isinstance(self.output_size, int):
if h > w:
new_h, new_w = self.output_size * h / w, self.output_size
else:
new_h, new_w = self.output_size, self.output_size * w / h
else:
new_h, new_w = self.output_size
new_h, new_w = int(new_h), int(new_w)
# #resize the image to new_h x new_w and convert image from range [0,255] to [0,1]
# img = transform.resize(image,(new_h,new_w),mode='constant')
# lbl = transform.resize(label,(new_h,new_w),mode='constant', order=0, preserve_range=True)
img = transform.resize(image, (self.output_size, self.output_size), mode='constant')
lbl = transform.resize(label, (self.output_size, self.output_size), mode='constant', order=0,
preserve_range=True)
return {'imidx': imidx, 'image': img, 'label': lbl}
class Rescale(object):
def __init__(self, output_size):
assert isinstance(output_size, (int, tuple))
self.output_size = output_size
def __call__(self, sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
if random.random() >= 0.5:
image = image[::-1]
label = label[::-1]
h, w = image.shape[:2]
if isinstance(self.output_size, int):
if h > w:
new_h, new_w = self.output_size * h / w, self.output_size
else:
new_h, new_w = self.output_size, self.output_size * w / h
else:
new_h, new_w = self.output_size
new_h, new_w = int(new_h), int(new_w)
# #resize the image to new_h x new_w and convert image from range [0,255] to [0,1]
img = transform.resize(image, (new_h, new_w), mode='constant')
lbl = transform.resize(label, (new_h, new_w), mode='constant', order=0, preserve_range=True)
return {'imidx': imidx, 'image': img, 'label': lbl}
class RandomCrop(object):
def __init__(self, output_size):
assert isinstance(output_size, (int, tuple))
if isinstance(output_size, int):
self.output_size = (output_size, output_size)
else:
assert len(output_size) == 2
self.output_size = output_size
def __call__(self, sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
if random.random() >= 0.5:
image = image[::-1]
label = label[::-1]
h, w = image.shape[:2]
new_h, new_w = self.output_size
top = np.random.randint(0, h - new_h)
left = np.random.randint(0, w - new_w)
image = image[top: top + new_h, left: left + new_w]
label = label[top: top + new_h, left: left + new_w]
return {'imidx': imidx, 'image': image, 'label': label}
class ToTensor(object):
"""Convert ndarrays in sample to Tensors."""
def __call__(self, sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
tmpImg = np.zeros((image.shape[0], image.shape[1], 3))
tmpLbl = np.zeros(label.shape)
image = image / np.max(image)
if (np.max(label) < 1e-6):
label = label
else:
label = label / np.max(label)
if image.shape[2] == 1:
tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229
tmpImg[:, :, 1] = (image[:, :, 0] - 0.485) / 0.229
tmpImg[:, :, 2] = (image[:, :, 0] - 0.485) / 0.229
else:
tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229
tmpImg[:, :, 1] = (image[:, :, 1] - 0.456) / 0.224
tmpImg[:, :, 2] = (image[:, :, 2] - 0.406) / 0.225
tmpLbl[:, :, 0] = label[:, :, 0]
# change the r,g,b to b,r,g from [0,255] to [0,1]
# transforms.Normalize(mean = (0.485, 0.456, 0.406), std = (0.229, 0.224, 0.225))
tmpImg = tmpImg.transpose((2, 0, 1))
tmpLbl = label.transpose((2, 0, 1))
return {'imidx': torch.from_numpy(imidx), 'image': torch.from_numpy(tmpImg), 'label': torch.from_numpy(tmpLbl)}
class ToTensorLab(object):
"""Convert ndarrays in sample to Tensors."""
def __init__(self, flag=0):
self.flag = flag
def __call__(self, sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
tmpLbl = np.zeros(label.shape)
if (np.max(label) < 1e-6):
label = label
else:
label = label / np.max(label)
# change the color space
if self.flag == 2: # with rgb and Lab colors
tmpImg = np.zeros((image.shape[0], image.shape[1], 6))
tmpImgt = np.zeros((image.shape[0], image.shape[1], 3))
if image.shape[2] == 1:
tmpImgt[:, :, 0] = image[:, :, 0]
tmpImgt[:, :, 1] = image[:, :, 0]
tmpImgt[:, :, 2] = image[:, :, 0]
else:
tmpImgt = image
tmpImgtl = color.rgb2lab(tmpImgt)
# nomalize image to range [0,1]
tmpImg[:, :, 0] = (tmpImgt[:, :, 0] - np.min(tmpImgt[:, :, 0])) / (
np.max(tmpImgt[:, :, 0]) - np.min(tmpImgt[:, :, 0]))
tmpImg[:, :, 1] = (tmpImgt[:, :, 1] - np.min(tmpImgt[:, :, 1])) / (
np.max(tmpImgt[:, :, 1]) - np.min(tmpImgt[:, :, 1]))
tmpImg[:, :, 2] = (tmpImgt[:, :, 2] - np.min(tmpImgt[:, :, 2])) / (
np.max(tmpImgt[:, :, 2]) - np.min(tmpImgt[:, :, 2]))
tmpImg[:, :, 3] = (tmpImgtl[:, :, 0] - np.min(tmpImgtl[:, :, 0])) / (
np.max(tmpImgtl[:, :, 0]) - np.min(tmpImgtl[:, :, 0]))
tmpImg[:, :, 4] = (tmpImgtl[:, :, 1] - np.min(tmpImgtl[:, :, 1])) / (
np.max(tmpImgtl[:, :, 1]) - np.min(tmpImgtl[:, :, 1]))
tmpImg[:, :, 5] = (tmpImgtl[:, :, 2] - np.min(tmpImgtl[:, :, 2])) / (
np.max(tmpImgtl[:, :, 2]) - np.min(tmpImgtl[:, :, 2]))
# tmpImg = tmpImg/(np.max(tmpImg)-np.min(tmpImg))
tmpImg[:, :, 0] = (tmpImg[:, :, 0] - np.mean(tmpImg[:, :, 0])) / np.std(tmpImg[:, :, 0])
tmpImg[:, :, 1] = (tmpImg[:, :, 1] - np.mean(tmpImg[:, :, 1])) / np.std(tmpImg[:, :, 1])
tmpImg[:, :, 2] = (tmpImg[:, :, 2] - np.mean(tmpImg[:, :, 2])) / np.std(tmpImg[:, :, 2])
tmpImg[:, :, 3] = (tmpImg[:, :, 3] - np.mean(tmpImg[:, :, 3])) / np.std(tmpImg[:, :, 3])
tmpImg[:, :, 4] = (tmpImg[:, :, 4] - np.mean(tmpImg[:, :, 4])) / np.std(tmpImg[:, :, 4])
tmpImg[:, :, 5] = (tmpImg[:, :, 5] - np.mean(tmpImg[:, :, 5])) / np.std(tmpImg[:, :, 5])
elif self.flag == 1: # with Lab color
tmpImg = np.zeros((image.shape[0], image.shape[1], 3))
if image.shape[2] == 1:
tmpImg[:, :, 0] = image[:, :, 0]
tmpImg[:, :, 1] = image[:, :, 0]
tmpImg[:, :, 2] = image[:, :, 0]
else:
tmpImg = image
tmpImg = color.rgb2lab(tmpImg)
# tmpImg = tmpImg/(np.max(tmpImg)-np.min(tmpImg))
tmpImg[:, :, 0] = (tmpImg[:, :, 0] - np.min(tmpImg[:, :, 0])) / (
np.max(tmpImg[:, :, 0]) - np.min(tmpImg[:, :, 0]))
tmpImg[:, :, 1] = (tmpImg[:, :, 1] - np.min(tmpImg[:, :, 1])) / (
np.max(tmpImg[:, :, 1]) - np.min(tmpImg[:, :, 1]))
tmpImg[:, :, 2] = (tmpImg[:, :, 2] - np.min(tmpImg[:, :, 2])) / (
np.max(tmpImg[:, :, 2]) - np.min(tmpImg[:, :, 2]))
tmpImg[:, :, 0] = (tmpImg[:, :, 0] - np.mean(tmpImg[:, :, 0])) / np.std(tmpImg[:, :, 0])
tmpImg[:, :, 1] = (tmpImg[:, :, 1] - np.mean(tmpImg[:, :, 1])) / np.std(tmpImg[:, :, 1])
tmpImg[:, :, 2] = (tmpImg[:, :, 2] - np.mean(tmpImg[:, :, 2])) / np.std(tmpImg[:, :, 2])
else: # with rgb color
tmpImg = np.zeros((image.shape[0], image.shape[1], 3))
image = image / np.max(image)
if image.shape[2] == 1:
tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229
tmpImg[:, :, 1] = (image[:, :, 0] - 0.485) / 0.229
tmpImg[:, :, 2] = (image[:, :, 0] - 0.485) / 0.229
else:
tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229
tmpImg[:, :, 1] = (image[:, :, 1] - 0.456) / 0.224
tmpImg[:, :, 2] = (image[:, :, 2] - 0.406) / 0.225
tmpLbl[:, :, 0] = label[:, :, 0]
# change the r,g,b to b,r,g from [0,255] to [0,1]
# transforms.Normalize(mean = (0.485, 0.456, 0.406), std = (0.229, 0.224, 0.225))
tmpImg = tmpImg.transpose((2, 0, 1))
tmpLbl = label.transpose((2, 0, 1))
return {'imidx': torch.from_numpy(imidx), 'image': torch.from_numpy(tmpImg), 'label': torch.from_numpy(tmpLbl)}
class SalObjDataset(Dataset):
def __init__(self, img_name_list, lbl_name_list, transform=None):
# self.root_dir = root_dir
# self.image_name_list = glob.glob(image_dir+'*.png')
# self.label_name_list = glob.glob(label_dir+'*.png')
self.image_name_list = img_name_list
self.label_name_list = lbl_name_list
self.transform = transform
def __len__(self):
return len(self.image_name_list)
def __getitem__(self, idx):
# image = Image.open(self.image_name_list[idx])#io.imread(self.image_name_list[idx])
# label = Image.open(self.label_name_list[idx])#io.imread(self.label_name_list[idx])
image = io.imread(self.image_name_list[idx])
imname = self.image_name_list[idx]
imidx = np.array([idx])
if (0 == len(self.label_name_list)):
label_3 = np.zeros(image.shape)
else:
label_3 = io.imread(self.label_name_list[idx])
label = np.zeros(label_3.shape[0:2])
if (3 == len(label_3.shape)):
label = label_3[:, :, 0]
elif (2 == len(label_3.shape)):
label = label_3
if (3 == len(image.shape) and 2 == len(label.shape)):
label = label[:, :, np.newaxis]
elif (2 == len(image.shape) and 2 == len(label.shape)):
image = image[:, :, np.newaxis]
label = label[:, :, np.newaxis]
sample = {'imidx': imidx, 'image': image, 'label': label}
if self.transform:
sample = self.transform(sample)
return sample
三、train.py
import torch
import torchvision
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms, utils
import torch.optim as optim
import torchvision.transforms as standard_transforms
import numpy as np
import glob
from dataloader import Rescale,RescaleT,RandomCrop,ToTensor,ToTensorLab,SalObjDataset
from u2net import U2NET
from u2net import U2NETP
# ------- 1. define loss function --------
bce_loss = nn.BCELoss(size_average=True)
def muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v):
loss0 = bce_loss(d0,labels_v)
loss1 = bce_loss(d1,labels_v)
loss2 = bce_loss(d2,labels_v)
loss3 = bce_loss(d3,labels_v)
loss4 = bce_loss(d4,labels_v)
loss5 = bce_loss(d5,labels_v)
loss6 = bce_loss(d6,labels_v)
loss = loss0 + loss1 + loss2 + loss3 + loss4 + loss5 + loss6
print("l0: %3f, l1: %3f, l2: %3f, l3: %3f, l4: %3f, l5: %3f, l6: %3f\n"%(loss0.item(),loss1.item(),loss2.item(),loss3.item(),loss4.item(),loss5.item(),loss6.item()))
return loss0, loss
def main():
# ------- 2. set the directory of training dataset --------
model_name = 'u2net' #'u2netp'
data_dir = 'C:\datasets'
tra_image_dir = '\DUTS\DUTS-TR\DUTS-TR-Image\\'
tra_label_dir = '\DUTS\DUTS-TR\DUTS-TR-Mask\\'
image_ext = '.jpg'
label_ext = '.png'
model_dir = './saved_models/' + model_name +'/'
epoch_num = 100000
batch_size_train = 4
batch_size_val = 1
train_num = 0
val_num = 0
tra_img_name_list = glob.glob(data_dir + tra_image_dir + '*')
print(tra_img_name_list)
tra_lbl_name_list = []
for img_path in tra_img_name_list:
img_name = img_path.split("\\")[-1]
aaa = img_name.split(".")
bbb = aaa[0:-1]
#去除后缀的图片名
imidx = bbb[0]
# print(imidx)
for i in range(1,len(bbb)):
imidx = imidx + "." + bbb[i]
print(imidx,"**********")
tra_lbl_name_list.append(data_dir + tra_label_dir + imidx + label_ext)
print("---")
print("train images: ", len(tra_img_name_list))
print("train labels: ", len(tra_lbl_name_list))
print("---")
train_num = len(tra_img_name_list)
salobj_dataset = SalObjDataset(
img_name_list=tra_img_name_list,
lbl_name_list=tra_lbl_name_list,
transform=transforms.Compose([
RescaleT(320),
RandomCrop(288),
ToTensorLab(flag=0)]))
salobj_dataloader = DataLoader(salobj_dataset, batch_size=batch_size_train, shuffle=True, num_workers=1)
# ------- 3. define model --------
# define the net
if(model_name=='u2net'):
net = U2NET(3, 1)
elif(model_name=='u2netp'):
net = U2NETP(3,1)
if torch.cuda.is_available():
net.cuda()
# ------- 4. define optimizer --------
print("---define optimizer...")
optimizer = optim.Adam(net.parameters(), lr=0.001, betas=(0.9, 0.999), eps=1e-08, weight_decay=0)
net.pool34.parameters()
# ------- 5. training process --------
print("---start training...")
ite_num = 0
running_loss = 0.0
running_tar_loss = 0.0
ite_num4val = 0
save_frq = 2000 # save the model every 2000 iterations
for epoch in range(0, epoch_num):
net.train()
for i, data in enumerate(salobj_dataloader):
ite_num = ite_num + 1
ite_num4val = ite_num4val + 1
inputs, labels = data['image'], data['label']
inputs = inputs.type(torch.FloatTensor)
labels = labels.type(torch.FloatTensor)
# wrap them in Variable
if torch.cuda.is_available():
# A = nn.Parameter(inputs,requires_grad=True)
inputs_v, labels_v = Variable(inputs.cuda(), requires_grad=False), Variable(labels.cuda(),
requires_grad=False)
else:
inputs_v, labels_v = Variable(inputs, requires_grad=False), Variable(labels, requires_grad=False)
# y zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
d0, d1, d2, d3, d4, d5, d6 = net(inputs_v)
loss2, loss = muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v)
loss.backward()
optimizer.step()
# # print statistics
running_loss += loss.item()
running_tar_loss += loss2.item()
# delete temporary outputs and loss
del d0, d1, d2, d3, d4, d5, d6, loss2, loss
print("[epoch: %3d/%3d, batch: %5d/%5d, ite: %d] train loss: %3f, tar: %3f " % (
epoch + 1, epoch_num, (i + 1) * batch_size_train, train_num, ite_num, running_loss / ite_num4val, running_tar_loss / ite_num4val))
if ite_num % save_frq == 0:
# torch.save(net.state_dict(), model_dir + model_name+"_bce_itr_%d_train_%3f_tar_%3f.pth" % (ite_num, running_loss / ite_num4val, running_tar_loss / ite_num4val))
running_loss = 0.0
running_tar_loss = 0.0
net.train() # resume train
ite_num4val = 0
if __name__ == "__main__":
main()
四、test.py
import os
from skimage import io, transform
import torch
import torchvision
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms#, utils
# import torch.optim as optim
import numpy as np
from PIL import Image
import glob
from dataloader import RescaleT,ToTensor,ToTensorLab,SalObjDataset
from u2net import U2NET # full size version 173.6 MB
from u2net import U2NETP # small version u2net 4.7 MB
# normalize the predicted SOD probability map
def normPRED(d):
ma = torch.max(d)
mi = torch.min(d)
dn = (d-mi)/(ma-mi)
return dn
def save_output(image_name,pred,d_dir):
predict = pred
predict = predict.squeeze()
predict_np = predict.cpu().data.numpy()
im = Image.fromarray(predict_np*255).convert('RGB')
img_name = image_name.split("\\")[-1]
# print(image_name)
# print(img_name)
image = io.imread(image_name)
imo = im.resize((image.shape[1],image.shape[0]),resample=Image.BILINEAR)
pb_np = np.array(imo)
aaa = img_name.split(".")
bbb = aaa[0:-1]
# print(aaa)
# print(bbb)
imidx = bbb[0]
for i in range(1,len(bbb)):
imidx = imidx + "." + bbb[i]
imo.save(d_dir+imidx+'.png')
def main():
# --------- 1. get image path and name ---------
model_name='u2net'#u2netp
image_dir = './test_data/test_images/'
prediction_dir = './test_data/' + model_name + '_results/'
model_dir = './saved_models/'+ model_name + '/' + model_name + '.pth'
img_name_list = glob.glob(image_dir + '*')
print(img_name_list)
# --------- 2. dataloader ---------
#1. dataloader
test_salobj_dataset = SalObjDataset(img_name_list = img_name_list,
lbl_name_list = [],
transform=transforms.Compose([RescaleT(320),
ToTensorLab(flag=0)])
)
test_salobj_dataloader = DataLoader(test_salobj_dataset,
batch_size=1,
shuffle=False,
num_workers=1)
# --------- 3. model define ---------
if(model_name=='u2net'):
print("...load U2NET---173.6 MB")
net = U2NET(3,1)
elif(model_name=='u2netp'):
print("...load U2NEP---4.7 MB")
net = U2NETP(3,1)
net.load_state_dict(torch.load(model_dir))
if torch.cuda.is_available():
net.cuda()
net.eval()
# --------- 4. inference for each image ---------
for i_test, data_test in enumerate(test_salobj_dataloader):
print("inferencing:",img_name_list[i_test].split("/")[-1])
inputs_test = data_test['image']
inputs_test = inputs_test.type(torch.FloatTensor)
if torch.cuda.is_available():
inputs_test = Variable(inputs_test.cuda())
else:
inputs_test = Variable(inputs_test)
d1,d2,d3,d4,d5,d6,d7= net(inputs_test)
# normalization
pred = d1[:,0,:,:]
pred = normPRED(pred)
# save results to test_results folder
save_output(img_name_list[i_test],pred,prediction_dir)
del d1,d2,d3,d4,d5,d6,d7
if __name__ == "__main__":
main()
五、crop.py
# -*- coding: utf-8 -*-
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
def crop(img_file, mask_file):
# name, *_ = img_file.split(".")
img_array = np.array(Image.open(img_file))
mask = np.array(Image.open(mask_file))
#通过将原图和mask图片归一化值相乘,把背景转成黑色
#从mask中随便找一个通道,cat到RGB后面,最后转成RGBA
# res = np.concatenate((img_array * (mask/255), mask[:, :, [0]]), -1)
# print(res.shape)
res = np.concatenate((img_array, mask[:, :, [0]]), -1)
img = Image.fromarray(res.astype('uint8'), mode='RGBA')
# img.show()
return img
if __name__ == "__main__":
import os
model = "u2net"
# model = "u2netp"
img_root = "test_data/test_images"
mask_root = "test_data/{}_results".format(model)
crop_root = "test_data/{}_crops".format(model)
os.makedirs(crop_root, mode=0o775, exist_ok=True)
for img_file in os.listdir(img_root):
print("crop image {}".format(img_file))
name, *_ = img_file.split(".")
res = crop(
os.path.join(img_root, img_file),
os.path.join(mask_root, name + ".png")
)
res.save(os.path.join(crop_root, name + "_crop.png"))
# exit()
六、效果展示
原图:
效果图:

合并后的效果图:

效果堪比PS!