matlab---s函数讲解之二连杆动力学仿真
matlab虽然后simulink,但是再复杂系统的仿真的时候简单的simulink中模块不能满足要求,因此需要自己建立s函数,作为仿真中的一个模块
在控制系统中分为控制器和被控对象。
matlab---s函数讲解之二连杆动力学仿真
- 零、原理
- 一、控制器
- 1、功能选择函数(flag)
- 2、初始化函数
- 3、输出函数
- 二、被控对象
- 1、功能选择函数(flag)
- 2、初始化函数
- 3、连续状态变量更新函数
- 4、输出函数
- 三、控制框图
- 四、代码
零、原理
1、定点控制时,期望为常数,所以可以利用导数为0的特性构造误差动力学,然后构造李雅普诺夫函数,证明稳定性。

一、控制器
1、功能选择函数(flag)
function [sys,x0,str,ts] = spacemodel(t,x,u,flag)
switch flag
case 0
[sys,x0,str,ts] = mdlInitializeSizes;
case 3
sys = mdlOutputs(t,x,u);
case {2,4,9}
sys = [];
otherwise
error(['Unhandlede flag = ',num2str(flag)]);
end
end
在s函数中,这是必须的一个函数,s函数中的标志为flag有10个,据说目前支持的有0、1、2、3、4、9等几个数值。matlab中S函数的概念及使用
1)flag=0。进行系统的初始化过程,调用mdlInitializeSizes函数,对参数进行初始化设置,比如离散状态个数、连续状态个数、模块输入和输出的路数、模块的采样周期个数、状态变量初始数值等。2)flag=1。进行连续状态变量的更新,调用mdlDerivatives函数。3)flag=2。进行离散状态变量的更新,调用mdlUpdate函数。4)flag=3。求取系统的输出信号,调用mdlOutputs函数。5)flag=4。调用mdlGetTimeOfNextVarHit函数,计算下一仿真时刻,由sys返回。6)flag=9。终止仿真过程,调用mdlTerminate函数。
同时,需要注意对于离散状态更新,每个仿真步内必然调用该子函数,不论是否有意义。Matlab S-function 使用总结
2、初始化函数
function [sys,x0,str,ts] = mdlInitializeSizes
sizes = simsizes;
sizes.NumOutputs = 2;
sizes.NumInputs = 6;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
end
可以看到在控制器中一般没有状态变量,而状态变量一般都在被控对象中。这也就导致了没有连续状态变量的定义,也就没有了连续状态更新的函数定义(状态方程)。(ps:虽然离散状态更新每个仿真中都会调用,flag=2.)
所以x0不需要定义值,只需要定义空就可以。
ts的值表示每个连续的采样时间步都运行。
sizes.DirFeedthrough = 1:只要输出函数中有u就需要=1。
3、输出函数
function sys = mdlOutputs(t,x,u)
R1 = u(1);dr1 = 0;
R2 = u(2);dr2 = 0;
x(1) = u(3);
x(2) = u(4);
x(3) = u(5);
x(4) = u(6);
e1 = R1 - x(1);
e2 = R2 - x(3);
e = [e1;e2];
de1 = dr1 - x(2);
de2 = dr2 - x(4);
de = [de1;de2];
Kp = [30 0;0 30];
Kd = [30 0;0 30];
tol = Kp*e+Kd*de;
sys(1) = tol(1);
sys(2) = tol(2);
end
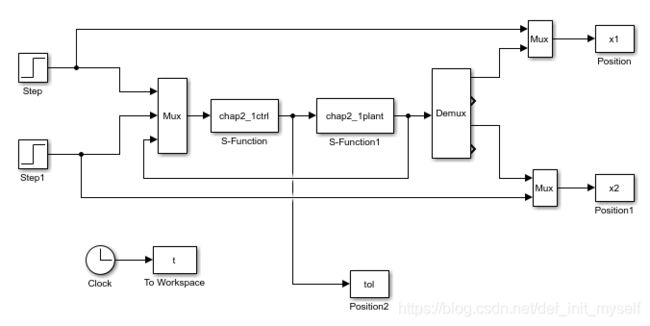
控制流程图如下:
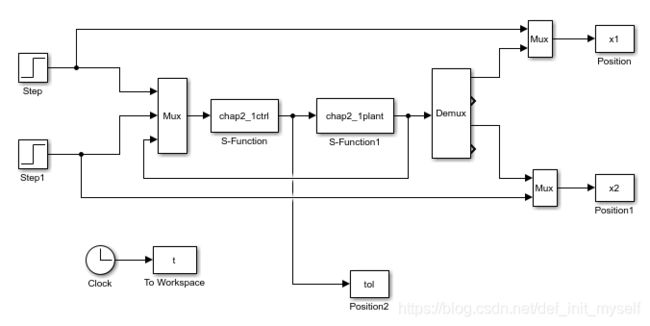
控制器的输入信号之前加了一个Mux,作用是可以将输入向量拼接成一个向量。根据图上的顺序,u1,u2就是输入信号(关节值),u3,u4,u5,u6是那个反馈信号向量中包含的值,也就是被控对象的输出信号。
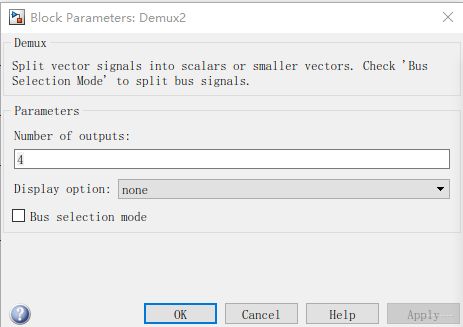
这里关注demux的输出,正如上面所说,被控对象输出4个元素,双击在块设置中如下设置
但是输出连接到mux的只有x1和x3.
u3-u6在后面分析中可以知道,分别是q1,q2以及他们的导数。
然后根据R和q构造e;根据dr和dq构建de,这里因为dr=0,所以设为常数。
二、被控对象
1、功能选择函数(flag)
function [sys,x0,str,ts]=s_function(t,x,u,flag)
switch flag,
%Initialization
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
%Outputs
case 3,
sys=mdlOutputs(t,x,u);
%Unhandled flags
case {2, 4, 9 }
sys = [];
%Unexpected flags
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
因为后面设置了连续状态变量,所以这里需要有状态更新函数设置。
2、初始化函数
function [sys,x0,str,ts]=mdlInitializeSizes
global p g
sizes = simsizes;
sizes.NumContStates = 4;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 4;
sizes.NumInputs =2;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 0;
sys=simsizes(sizes);
x0=[0 0 0 0];
str=[];
ts=[];
p=[2.9 0.76 0.87 3.04 0.87];
g=9.8;
这里定义的全局变量p在后面的状态更新函数中有用到。
这里因为定义连续状态变量,所以x0不能定义空数组,输入是控制器输出的tol,输出是4个状态变量,虽然最后只连接存储两个。
3、连续状态变量更新函数
function sys=mdlDerivatives(t,x,u)
global p g
D0=[p(1)+p(2)+2*p(3)*cos(x(3)) p(2)+p(3)*cos(x(3));
p(2)+p(3)*cos(x(3)) p(2)];
C0=[-p(3)*x(4)*sin(x(3)) -p(3)*(x(2)+x(4))*sin(x(3));
p(3)*x(2)*sin(x(3)) 0];
tol=u(1:2);
dq=[x(2);x(4)];
S=inv(D0)*(tol-C0*dq);
sys(1)=x(2);
sys(2)=S(1);
sys(3)=x(4);
sys(4)=S(2);
这里是整个系统中最重要的部分—动力学方程。也就是在这个函数中更新状态变量。这里用到的状态变量有关节角度,以及关节角度的导数。
这里的输出是状态变量的导数,因为这个函数的名称就“求导”。
所以就要先手动求解q的二阶导数。然后和q的一阶导数共同组成“求导的结果。”
目测是当给出导数以后,状态变量的值就会自动更新。
4、输出函数
function sys=mdlOutputs(t,x,u)
sys(1)=x(1);
sys(2)=x(2);
sys(3)=x(3);
sys(4)=x(4);
输出状态变量
三、控制框图
四、代码
1、m
function [sys,x0,str,ts] = spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 3,
sys=mdlOutputs(t,x,u);
case {2,4,9}
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumOutputs = 2;
sizes.NumInputs = 6;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
function sys=mdlOutputs(t,x,u)
R1=u(1);dr1=0;
R2=u(2);dr2=0;
x(1)=u(3);
x(2)=u(4);
x(3)=u(5);
x(4)=u(6);
e1=R1-x(1);
e2=R2-x(3);
e=[e1;e2];
de1=dr1-x(2);
de2=dr2-x(4);
de=[de1;de2];
Kp=[50 0;0 50];
Kd=[50 0;0 50];
tol=Kp*e+Kd*de;
sys(1)=tol(1);
sys(2)=tol(2);
2、m
%S-function for continuous state equation
function [sys,x0,str,ts]=s_function(t,x,u,flag)
switch flag,
%Initialization
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
%Outputs
case 3,
sys=mdlOutputs(t,x,u);
%Unhandled flags
case {2, 4, 9 }
sys = [];
%Unexpected flags
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
%mdlInitializeSizes
function [sys,x0,str,ts]=mdlInitializeSizes
global p g
sizes = simsizes;
sizes.NumContStates = 4;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 4;
sizes.NumInputs =2;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 0;
sys=simsizes(sizes);
x0=[0 0 0 0];
str=[];
ts=[];
p=[2.9 0.76 0.87 3.04 0.87];
g=9.8;
function sys=mdlDerivatives(t,x,u)
global p g
D0=[p(1)+p(2)+2*p(3)*cos(x(3)) p(2)+p(3)*cos(x(3));
p(2)+p(3)*cos(x(3)) p(2)];
C0=[-p(3)*x(4)*sin(x(3)) -p(3)*(x(2)+x(4))*sin(x(3));
p(3)*x(2)*sin(x(3)) 0];
tol=u(1:2);
dq=[x(2);x(4)];
S=inv(D0)*(tol-C0*dq);
sys(1)=x(2);
sys(2)=S(1);
sys(3)=x(4);
sys(4)=S(2);
function sys=mdlOutputs(t,x,u)
sys(1)=x(1);
sys(2)=x(2);
sys(3)=x(3);
sys(4)=x(4);