二阶系统的时间响应及动态性能(时域分析)
1、二阶系统传递函数的标准形式
典型结构的二阶系统如下图:
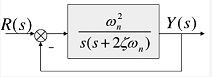
其前向通道传函:
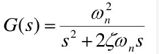
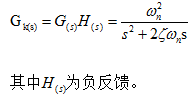
开环传函:
闭环传函:

Φ ( s ) \Phi_{(s)} Φ(s)为典型二阶系统传递函数的标准形式。 ξ \xi ξ 为阻尼系数, ω n \omega _{n} ωn 为无阻尼震荡自然频率。这两个参数称为二阶系统的特征参数。
系统的特征方程:
![]()
特征根 :
![]()
注意当 ξ \xi ξ不同时,特征根有不同的形式,系统的阶跃响应形式也不同,它的阶跃响应有振荡和非振荡两种情况。
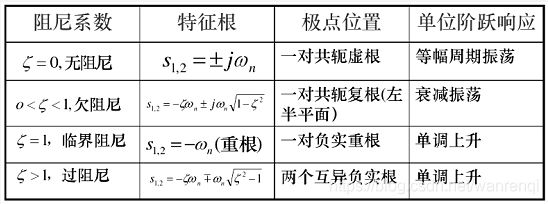
上面提到了极点(特征根)位置,说下系统稳定性的判别方法。当系统的极点位置都在复平面的左半平面时,则该系统稳定。 从上图看出只有当 ξ = 0 \xi=0 ξ=0 时系统是不稳定的。
2、当 0 < ξ < 1 0<\xi<1 0<ξ<1 欠阻尼衰减振荡下的二阶系统性能指标
单位阶跃输入信号下的性能指标 :
超调量:

调节时间ts: t s = 3.5 ζ ω n t_{s}=\frac{3.5}{\zeta \omega _{n}} ts=ζωn3.5
由上可见,如果无阻尼振荡频率 ω n \omega _{n} ωn一定的话,那么二阶系统的动态性能由 ζ \zeta ζ决定。
工程上有个最佳阻尼系数 ζ = 0.707 = 2 2 \zeta=0.707=\frac{\sqrt{2}}{2} ζ=0.707=22。这个参数怎么确定的呢,往下分析。
2.1、不同阻尼比对二阶系统动态性能的影响。
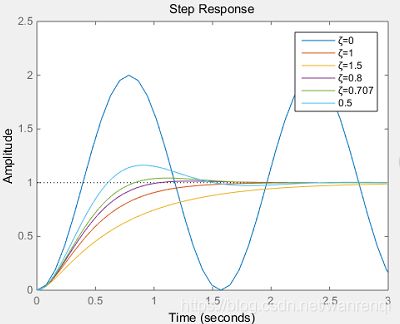
例如:一个典型的二阶系统传函 Φ ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 \Phi _{(s)}=\frac{\omega_{n} ^{2}}{s^{2}+2\zeta\omega _{n} s+\omega_{n} ^{2}} Φ(s)=s2+2ζωns+ωn2ωn2 ,我们令 ω n = 4 \omega_{n}=4 ωn=4,看 ξ \xi ξ为不同值的单位阶跃响应下的动态时间曲线。用MATLAB仿真下:
仿真程序如下:
>> step(tf(4^2,[1,2*0*4,4^2]));
axis([0 3 0 2.5])
hold on
step(tf(4^2,[1,2*1*4,4^2]));
axis([0 3 0 2.5])
hold on
step(tf(4^2,[1,2*1.5*4,4^2]));
axis([0 3 0 2.5])
hold on
step(tf(4^2,[1,2*0.8*4,4^2]));
axis([0 3 0 2.5])
hold on
step(tf(4^2,[1,2*0.707*4,4^2]));
axis([0 3 0 2.5])
hold on
step(tf(4^2,[1,2*0.5*4,4^2]));
axis([0 3 0 2.5])
hold on
可以看出当 ζ = 0.707 \zeta=0.707 ζ=0.707 动态性能比较好,所以在工程上对二阶系统的整定为 ζ = 0.707 \zeta=0.707 ζ=0.707。
如果把典型结构的二阶系统化成尾1型:

那么K为开环放大系数,T表示时间常数。 上图在陈伯时的运动控制系统中被称为典型I型二阶系统。
对应二阶系统的闭环传函标准型为:
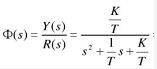
则 1 T = 2 ζ K T \frac{1}{T}=2\zeta \sqrt{\frac{K}{T}} T1=2ζTK ,如果工程整定 ζ = 0.707 \zeta=0.707 ζ=0.707 。则 KT=0.5 。