LD-MRS400001相关基础信息
该设备激光安全等级为1级,是对人眼安全的。
LD-MRS400001为3D雷达传感器系列,包含4个测量平面,工作范围角度扩展为110°,测量范围0.5m-300m,工作电压范围为9V-27V。可通过网线与电脑连接,利用配套软件实现实施扫描图像显示及扫描数据导出。配套操作软件SOPAS在西克官网可进行下载。
首先说明该雷达相关原理。
3.4.3 多重回声功能

上图是对多重回声现象产生的原理解释,激光束在不同距离、不同反射率物体处产生不同时长、不同强度回波。
LD-MRS最多可以收集评估每个激光脉冲3个回波。回波被光电二极管接收器接收后,即将接收的强度转换成电压。上图分别为雨滴、玻璃及物体产生的回波电压。各个回波都是由单发射脉冲反射产生的。阈值电压将系统将系统噪声与物体回波进行区分。

如图为LD-MRS400001扫描面示意图。四个扫描平面之间垂直孔径角为0.8°。SOPAS中以相同颜色显示实时扫描图像。
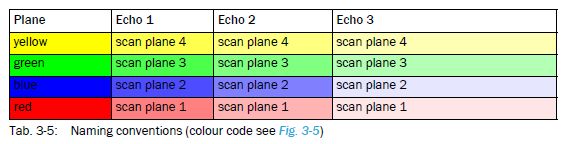
可视化平面中,颜色饱和度的减弱示意回声的减弱。试验中发现,后两层回声数量与第一层相比明显减少。
各扫描面的扫描角度不完全相同,中心扫描范围为85°。

下图为扫描角度和范围之间的关系示意图。
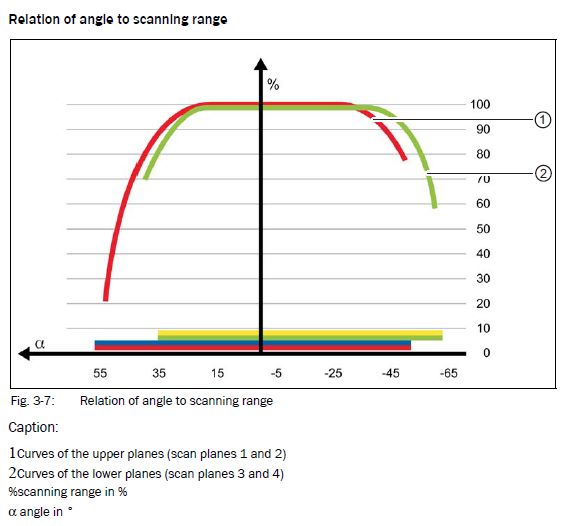
图中纵坐标轴所示扫描范围%,个人理解为扫描距离的百分比,不确定是否正确。
LD-MRS具有以太网接口,用于测量模式的配置和数据传输。
出厂默认情况下,以太网接口配置如下:IP地址:192.168.0.1 子网掩码:255.255.255.0 TCP端口:12002
LD-MRS接收并分析扫描回波脉冲。每个回波脉冲主要包含属性:点的位置、回波脉冲宽度、扫描平面和回波数
扫描数据获取
利用配套SOPAS软件可将扫描数据进行导出
SOPAS软件中通过设备登陆能够更改相关扫描参数设置。
授权用户 登录密码:Client
SPOAS数据记录仪中,可通过注册事件ScanDataMonitor请求扫描数据。
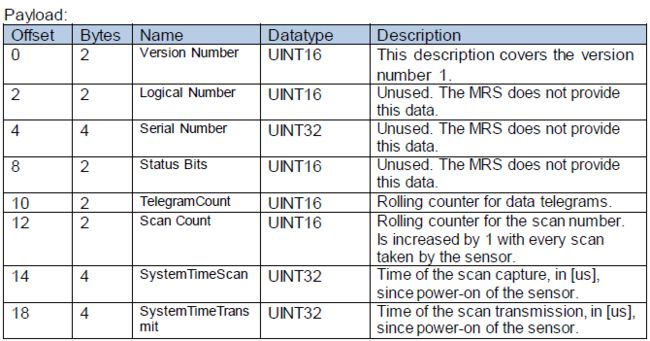
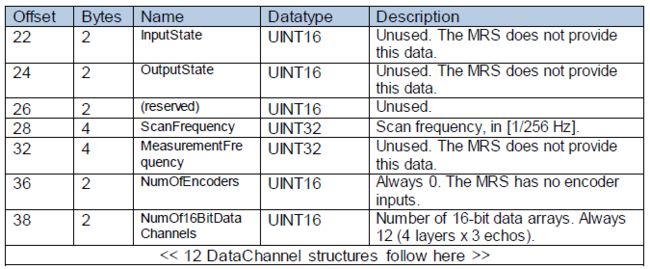
包含数据内容如下:
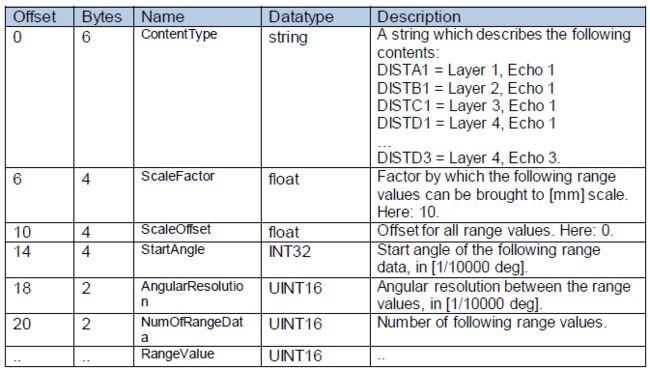
扫描数据可导出为csv类型文件。
导出数据文件中,包含上图中各数据参数数据及扫描回波数据。
通过公式计算可将计算物体在坐标系中的具体位置。
距离计算公式(单位:米):dist = ( RangeValue * scaleFactor ) / 1000.0
角度计算公式:hAngle = ( ( startAngle + d * angularResolution ) / 10000.0 ) d代表该数据点顺序值