MATLAB求六轴机器人运动空间问题
对运用MATLAB求解机器人运动空间讲解与心得,
参考代码https://blog.csdn.net/jldemanman/article/details/80911704,作者:JojenZz
clear;
clc;
%建立机器人模型
% theta d a alpha offset
ML1=Link([0 0 0 0 0 ],'modified');
ML2=Link([0 0 0.180 -pi/2 0 ],'modified');
ML3=Link([0 0 0.600 0 0 ],'modified');
ML4=Link([0 0.630 0.130 -pi/2 0 ],'modified');
ML5=Link([0 0 0 pi/2 0 ],'modified');
ML6=Link([0 0 0 -pi/2 0 ],'modified');
modrobot=SerialLink([ML1 ML2 ML3 ML4 ML5 ML6],'name','modified');
modrobot.plot([0,0,0,0,0,0]);
hold on;
N=30000; %随机次数
theta1=-165/180*pi+(165/180*pi+165/180*pi)*rand(N,1); %关节1限制
theta2=-90/180*pi+(155/180*pi+90/180*pi)*rand(N,1); %关节2限制
theta3=-200/180*pi+(70/180*pi+200/180*pi)*rand(N,1); %关节3限制
theta4=-170/180*pi+(170/180*pi+170/180*pi)*rand(N,1); %关节4限制
theta5=-135/180*pi+(135/180*pi+135/180*pi)*rand(N,1); %关节5限制
theta6=-360/180*pi+(360/180*pi+360/180*pi)*rand(N,1); %关节6限制
for n=1:1:30000
modmyt06=mymodfkine(theta1(n),theta2(n),theta3(n),theta4(n),theta5(n),theta6(n));
plot3(modmyt06(1,4),modmyt06(2,4),modmyt06(3,4),'b.','MarkerSize',0.5);
end
将代码copy到MATLAB中,直接运行这个程序,会遇到几个问题。
第一问题,函数未定义
第一个问题是mymodfkine未定义,因为这个函数是作者自己编写的,如果我们找不到这个函数的代码时候,这时候运行时不成功的当我们费力去找作者关于这个函数的代码时候,去运行还是遇到各种错误。

这时候我们可以用这个函数代替作者自己编写的函数mymodfkine函数。
主义,前面需要定义r,一会儿奉上所有源代码。
modmyt06=r.fkine([theta1(n),theta2(n),theta3(n),theta4(n),theta5(n),theta6(n)]);
第二问题,
当这个问题解决后,还有遇到第二个问题,

运行程序的时候,会出现索引超出矩阵维度,这时候我们发现,modmyt06不是一个4x4的矩阵,而是一个1x1SE的数值,而se为一个4x4的矩阵,我们无法提取出来他的末端位置坐标,这时我们需要用到一个transl函数,将运用transl(modmyt06)函数,将se中的位置坐标提取出来。
for n=1:1:N
modmyt06=r.fkine([theta1(n),theta2(n),theta3(n),theta4(n),theta5(n),theta6(n)]);
T=transl(modmyt06);
plot3(T(1,1),T(1,2),T(1,3),'b.','MarkerSize',2);
end
**
这样我们就可以运行成功啦,附上所有源代码,也可以到我的下载资源里边去下载,直接运行。下载链接:https://download.csdn.net/download/weixin_45839124/12169342
。**
clc
clear all;
L1=Link([0 0 0 0 0 ],'modified');
L2=Link([0 0 0.180 -pi/2 0 ],'modified');
L3=Link([0 0 0.600 0 0 ],'modified');
L4=Link([0 0.630 0.130 -pi/2 0 ],'modified');
L5=Link([0 0 0 pi/2 0 ],'modified');
L6=Link([0 0 0 -pi/2 0 ],'modified');
r=SerialLink([L1,L2,L3,L4,L5,L6],'name','jiqiren'); %建立机器人模型
r.display();
theta=[0 35/180*pi 46/180*pi 0 0 0]; %机器人初始各关节的角度
r.plot(theta);
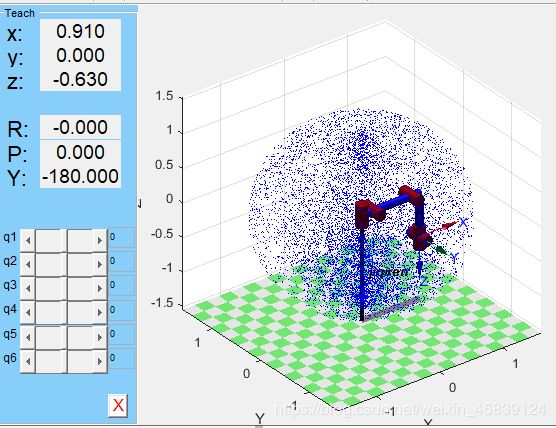
teach(r); %机器人示教
hold on;
N=10000; %随机次数
theta1=-165/180*pi+(165/180*pi+165/180*pi)*rand(N,1); %关节1限制
theta2=-90/180*pi+(155/180*pi+90/180*pi)*rand(N,1); %关节2限制
theta3=-200/180*pi+(70/180*pi+200/180*pi)*rand(N,1); %关节3限制
theta4=-170/180*pi+(170/180*pi+170/180*pi)*rand(N,1); %关节4限制
theta5=-135/180*pi+(135/180*pi+135/180*pi)*rand(N,1); %关节5限制
theta6=-360/180*pi+(360/180*pi+360/180*pi)*rand(N,1); %关节6限制
for n=1:1:N
modmyt06=r.fkine([theta1(n),theta2(n),theta3(n),theta4(n),theta5(n),theta6(n)]);
T=transl(modmyt06);
plot3(T(1,1),T(1,2),T(1,3),'b.','MarkerSize',2);
end
运行结果: