图论 —— 最短路 —— Dijkstra 算法
【概述】
Dijkstra 算法是单源最短路径算法,即计算起点只有一个的情况到其他点的最短路径,其无法处理存在负边权的情况。
其时间复杂度是:O(E+VlogV)
【算法分析】
将点分为两类,一类是已确定最短路径的点,称为:白点,一类是未确定最短路径的点,称为:蓝点。
求一个点的最短路径,就是把这个点由蓝点变为白点,从起点到蓝点的最短路径上的中转点在这个时刻只能是白点。
Dijkstra 算法的思想,就是一开始将起点到终点的距离标记为 0,而后进行 n 次循环,每次找出一个到起点距离 dis[u] 最短的点 u ,将它从蓝点变为白点,随后枚举所有白点 Vi,如果以此白点为中转到达蓝点 Vi 的路径 dis[u]+w[u][vi] 更短的话,这将它作为 Vi 的更短路径(此时还不能确定是不是Vi的最短路径)。
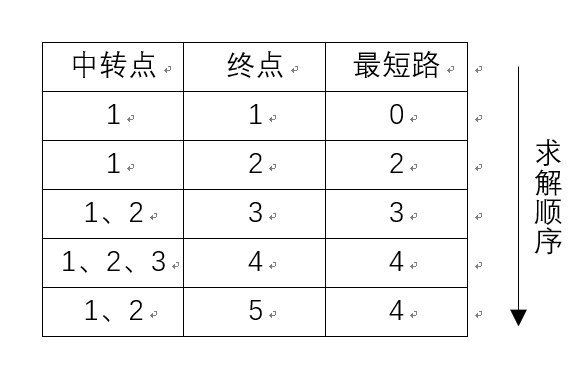
以此类推,每找到一个白点,就尝试用它修改其他所有蓝点,中转点先于终点变成白点,故每一个终点一定能被它的最后一个中转点所修改,从而求得最短路径。
以下图为例
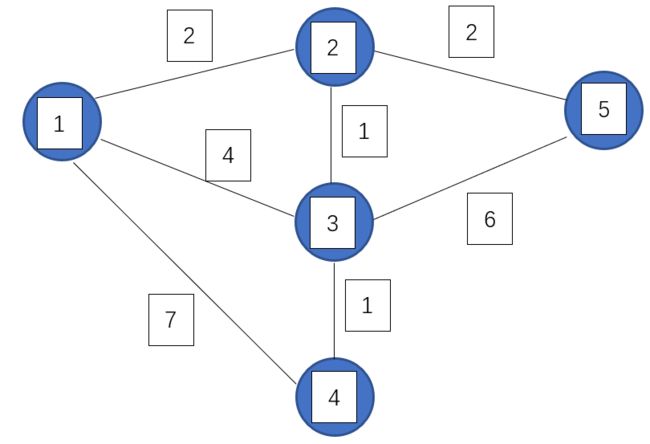
算法开始时,作为起点的 dis[1]=0,其他的点 dis[i]=0x3f3f3f3f
第一轮循环找到 dis[1] 最小,将 1 变为白点,对所有蓝点进行修改,使得:dis[2]=2,dis[3]=4,dis[4]=7

此时,dis[2]、dis[3]、dis[4] 被它的最后一个中转点 1 修改了最短路径。
第二轮循环找到 dis[2] 最小,将 2 变成白点,对所有蓝点进行修改,使得:dis[3]=3、dis[5]=4
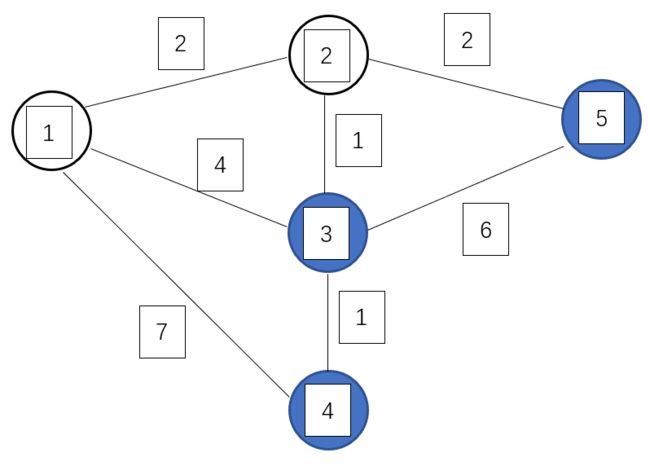
此时,dis[3]、dis[5] 被它的最后一个中转点 2 修改了最短路径。
第三轮循环找到 dis[3] 最小,将 3 变成白点,对所有蓝点进行修改,使得:dis[4]=4。
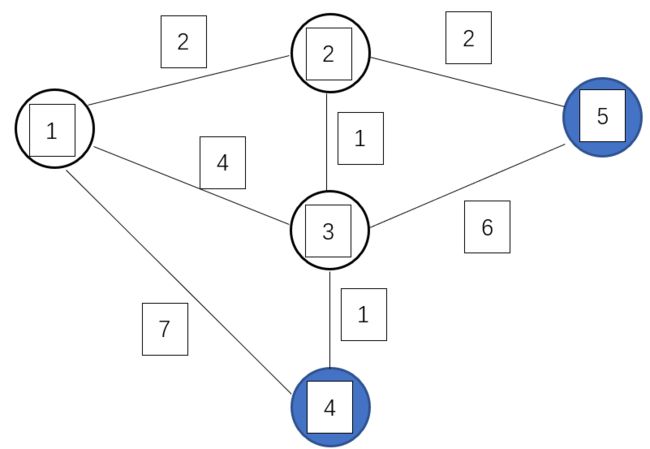
此时,dis[4] 被它的最后一个中转点 3 修改了最短路径,但发现以 3 为中转不能修改 5,说明 3 不是 5 的最后一个中转点。
接下来两轮循环将 4、5 也变成白点。
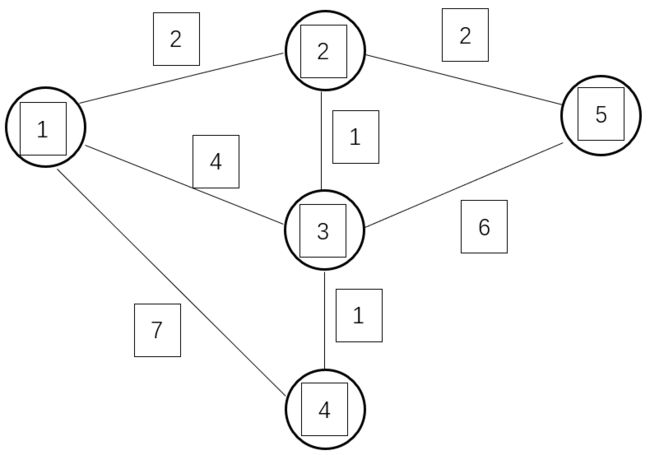
N轮循环结束,所有点的最短路径均可求出。
【算法描述】
设起点为 s,dis[v] 表示从 s 到 v 的最短路径,pre[v] 为 v 的前驱结点,vis[v] 用于记录 v 是否被访问过。
1.初始化:
dis[v]=0x3f3f3f3f(v≠s),vis[v]=false,即:从始点到各点的值初始化为一极大值,所有点均标记为未访问
dis[s]=0,pre[s]=0,即:始点到始点的距离为 0,且其没有前驱结点
2.算法主体:
for(int i=1;i<=n;i++) {
int min=INF;
int u=0;
for(int v=1;v<=n;v++) { //在没有被访问过的点中找一个顶点u,使得dis[u]是最小的
if( vis[v]==false && dis[v]3.算法结束:
dis[v] 即为 s 到 v 最短距离,pre[v] 即为 v 的前驱结点,用来输出路径。
【模版】
1.简化版
简化版不可处理重边图
int n;//图节点数目,从1到n编号
int dis[N];//单源最短距离
int G[N][N];//G[i][j]表示i到j的有向边长
bool vis[N];//表示w[i]是否已经计算完
void dijkstra(int s){
for(int i=1;i<=n;i++){
int x;//x标记当前最短w的点
int min_dis=INF;//记录当前最小距离
for(int y=1;y<=n;y++){
if(!vis[y] && min_dis>=dis[y]){
x=y;
min_dis=dis[x];
}
}
vis[x]=true;
for(int y=1;y<=n;y++)
dis[y]=min(dis[y],dis[x]+G[x][y]);
}
}
int main(){
memset(dis,INF,sizeof(dis));
memset(vis,0,sizeof(vis));
int n,m;
scanf("%d%d",&n,&m);
for(int i=1;i<=m;i++){
int x,y,dis;
scanf("%d%d%d",&x,&y,&dis);
G[x][y] = G[y][x] = dis; //无向图添边一次,有向图添边两次
}
int start;
scanf("%d",&start);
dijkstra(start);
for(int i=1;i<=n;i++)
printf("%d\n",dis[i]);
return 0;
}2.标准版
标准版适用于稀疏图,可处理重边图
int n,m;
struct Edge{//边
int from;//边的起点
int to;//边的终点
int dis;//边的长度
Edge(int f,int t,int d){//构造函数
from=f;
to=t;
dis=d;
}
};
struct HeapNode{//Dijkstra用到的优先队列的结点
int dis;//点到起点距离
int u;//点的序号
HeapNode(int a,int b){
dis=a;
u=b;
}
bool operator < (const HeapNode &rhs) const {
return dis > rhs.dis;
}
};
struct Dijkstra{
int n,m;//点数、边数
vector edges;//边列表
vector G[N];//每个结点出发的边的编号
bool vis[N];//是否走过
int dis[N];//起点s到各点的距离
int p[N];//从起点s到i的最短路中的最后一条边的编号
void init(int n) {//初始化
this->n = n;
for(int i=0;i Q;//优先队列
Q.push(HeapNode(0,s));
while(!Q.empty()) {
HeapNode x=Q.top();
Q.pop();
int u=x.u;
if(vis[u])//若已被访问
continue;
vis[u]=true;//标记为已访问
for(int i=0;i dis[u]+e.dis) {//更新距离
dis[e.to] = dis[u]+e.dis;
p[e.to]=G[u][i];
Q.push(HeapNode(dis[e.to],e.to));
}
}
}
return dis[n];//返回起点s到终点n最短距离
}
}DJ;
int main()
{
while(scanf("%d%d",&n,&m)!=EOF&&(n+m))
{
DJ.init(n);//初始化
for(int i=0;i%d: %d\n",s,++j,DJ.dis[i]);
}
return 0;
}