STM32定时器 正交编码
编码器分类:
按工作原理:光电式、磁电式和触点电刷式
按码盘的刻孔方式:增量式和绝对式两类
由于博主接触面还不是很广,一共就用过两个种类的编码器,都是属于光电的
差分编码器:一般由8根线连接 信号线分别为 A+ A- B+ B- Z+ Z- 以及VCC和GND
这里有一种不需要Z信号的,6线差分A+ A- B+ B- VCC 和GND
正交编码器:一般是5根线连接,信号线分别为A B Z VCC和GND
编码器线数: 就是旋转一圈你的A(B)会输出多少个脉冲 ,这里的A B就是上面的输出脉冲信号线,它们转一圈发出的脉冲数一样的,不过存在90°相位差 通常都是360线的 线数越高代表编码器能够反应的位置精度越高

相位差为90° 通过判断哪个信号在前 哪个信号在后 来决定TIM->COUNT是++ 还是 –
360线 AB一圈各为360个,Z信号为一圈一个
编码器信号:
A 脉冲输出
B 脉冲输出
Z 零点信号 当编码器旋转到零点时,Z信号会发出一个脉冲表示现在是零位置 这个零点位置是固定,厂商指定的
VCC 电源通常分为24V的和5V的
GND 地线
这里需要注意:
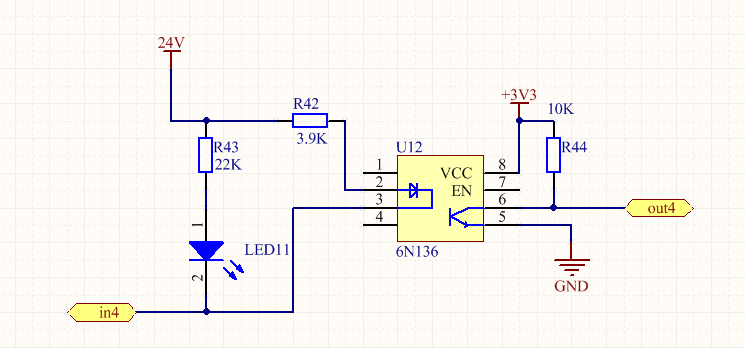
1.这里的正交编码器是如果是24V的工作电压还需要用光耦隔离,24V转为3V3在接到STM32的定时器两个通道上
2.脉冲输出是OC门输出,需要上拉电阻
3.Z信号接到STM32的外部中断口上,很容易受到干扰 ,通常需要接一个电容到GND
这里给出一个24V转3.3V的隔离电路,用到的是6N136光耦
硬件连接(这里使用的STM32F103ZET6的TIM4的CH1和CH2):
PB6–A
PB7–B
PA1–Z

代码详解:
TIM4初始化代码如下:
#include "stm32f10x.h"
#include "encode.h"
#include "misc.h"
#include "nvic.h"
#include "sys.h"
#include "delay.h"
void TIM4_Mode_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
//PB6 ch1 A,PB7 ch2
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能GPIOA时钟
GPIO_StructInit(&GPIO_InitStructure);//将GPIO_InitStruct中的参数按缺省值输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//PA6 PA7浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_Config(2);
TIM_DeInit(TIM4);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = 359*4; //设定计数器重装值 TIMx_ARR = 359*4
TIM_TimeBaseStructure.TIM_Prescaler = 0; //TIM3时钟预分频值
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1 ;//设置时钟分割 T_dts = T_ck_int
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge);//使用编码器模式3,上升下降都计数
TIM_ICStructInit(&TIM_ICInitStructure);//将结构体中的内容缺省输入
TIM_ICInitStructure.TIM_ICFilter = 6; //选择输入比较滤波器
TIM_ICInit(TIM4, &TIM_ICInitStructure);//将TIM_ICInitStructure中的指定参数初始化TIM3
// TIM_ARRPreloadConfig(TIM4, ENABLE);//使能预装载
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM3的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);//运行更新中断
//Reset counter
TIM4->CNT = 0;//
TIM_Cmd(TIM4, ENABLE); //启动TIM4定时器
}
/*
void TIM3_Mode_Config(void)
{
///TIM3 clock source enable
RCC->APB1ENR|=1<<1; //TIM3时钟使能
// Enable 1GPIOA, clock
RCC->APB2ENR|=1<<2; //使能PORTA时钟
// Configure PA.06,07 as encoder input
GPIOA->CRL&=0XF0FFFFFF;//PA6
GPIOA->CRL|=0X04000000;//浮空输入
GPIOA->CRL&=0X0FFFFFFF;//PA7
GPIOA->CRL|=0X40000000;//浮空输入
// Enable the TIM3 Update Interrupt
//这两个东东要同时设置才可以使用中断
TIM3->DIER|=1<<0; //允许更新中断
TIM3->DIER|=1<<6; //允许触发中断
TIM3_NVIC_Config();
//Timer configuration in Encoder mode
TIM3->PSC = 0x0;//预分频器
TIM3->ARR = 15-1;//设定计数器自动重装值
TIM3->CR1 &=~(3<<8);// 选择时钟分频:不分频
TIM3->CR1 &=~(3<<5);// 选择计数模式:边沿对齐模式
TIM3->CCMR1 |= 1<<0; //CC1S='01' IC1FP1映射到TI1
TIM3->CCMR1 |= 1<<8; //CC2S='01' IC2FP2映射到TI2
TIM3->CCER &= ~(1<<1); //CC1P='0' IC1FP1不反相,IC1FP1=TI1
TIM3->CCER &= ~(1<<5); //CC2P='0' IC2FP2不反相,IC2FP2=TI2
TIM3->CCMR1 |= 3<<4; // IC1F='1000' 输入捕获1滤波器
TIM3->SMCR |= 3<<0; //SMS='011' 所有的输入均在上升沿和下降沿有效
TIM3->CNT = 0;
TIM3->CR1 |= 0x01; //CEN=1,使能定时器
}*/
void TIM4_Init(void)
{
TIM4_Mode_Config();
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
这里的NVIC_Config(2)是我个人写的一种多种中断配置的方法单独放在nvic.c中需要了解的可以自己看看工程
这里通常要问的是两点
1.TIM_TimeBaseStructure.TIM_Period = 359*4
2.TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge);//使用编码器模式3,上升下降都计数
很多人不理解为要360线的编码器为什么这里的重装值乘以4 读出来的为什么又要/4,其实这两个要结合起来解释
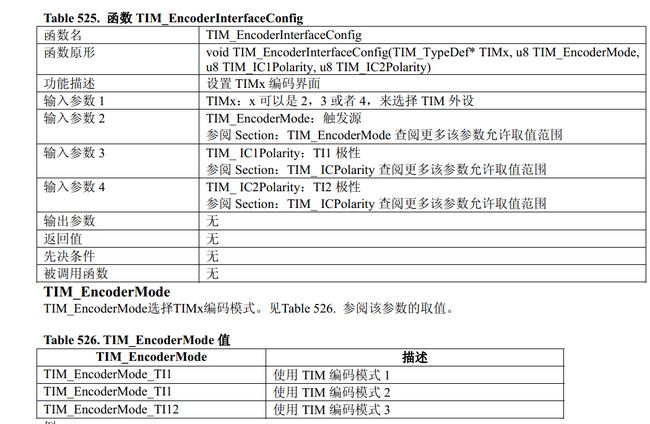
首先看看这个函数TIM_EncoderInterfaceConfig,它有4个参数
1.选择哪个定时器 即TIM4
2.编码器模式有三种 见下图
3.TIM_IC1的极性
4.TIM_IC2的极性
这里设置的是编码器模式3,且TI1和TI2都是双边沿触发–即上下边沿都计数
还有一个大家不是很懂的图,我来分析一下

1.有效边沿 其实就是对应上面设置的编码器的三种模式
2.相对信号的电平,这里没有理解手册意思,我把它理解为于它的高低电平意味着将PB6和PB7接口对换,PB7接A PB6接B 这样一来就意味着原来的正转变成反转 计数上升变为下降


TIx 就相当于输入信号的 TIM4->CH1 TIM4->CH2
TIxF 滤波后信号
TIxFPx经过带极性选择的边缘检测器过后的产生的信号
3.至于TI1FP1和TI2FP2信号在上身沿计数还是下降沿计数受两点影响 极性(是否反向) 边缘检测(上升沿还是下降沿)
我们这里设置的是不反向 在双边沿计数,即在A上升下降 B的上身下降都计数
而计数为什么是x4倍 ,下图结合上面的配置详细说明了
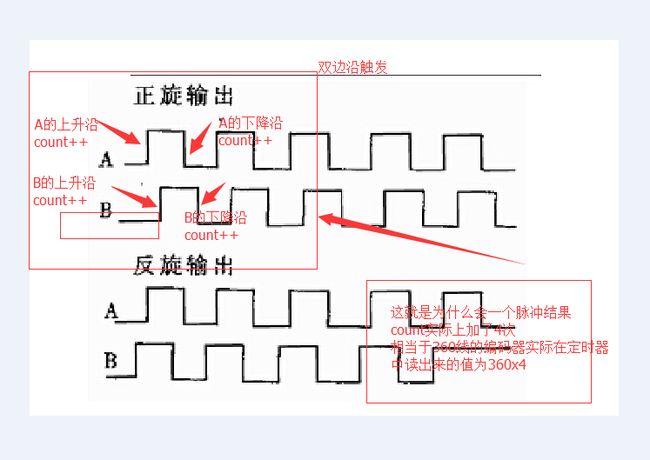
由此完成了编码器的配置
至于读取编码器角度的时间,要根据实际需要来设置
编码器线数为 w线/圈
转速为 V 圈/min
读取间隔时间 t(线间隔时间)
t <= 60/WV 单位为秒
还有Z信号归零,在遇到Z信号的时候,将定时器的CNT=0,这样就能保证位置与CNT实际对应上了
中断代码如下
//外部中断1,编码器Z相归零 优先级--① 0 0
void EXTI1_IRQHandler(void)
{
TIM4->CNT = 0;//每次遇到相对零(Z信号)就将计数归0
TIM_Cmd(TIM4, ENABLE);
EXTI_ClearITPendingBit(EXTI_Line1);
}
//编码器接口模式 优先级--2 1 1
void TIM4_IRQHandler(void)
{
if(TIM4->SR&0x0001)//溢出中断
{
;
}
TIM4->SR&=~(1<<0);//清除中断标志位
}