Data Structure_堆_二叉树_并查集
堆
堆这种数据结构的应用很广泛,比较常用的就是优先队列。普通的队列就是先进先出,后进后出。优先队列就不太一样,出队顺序和入队顺序没有关系,只和这个队列的优先级相关,比如去医院看病,你来的早不一定是先看你,因为病情严重的病人可能需要优先接受治疗,这就和时间顺序没有必然联系。优先队列最频繁的应用就是操作系统,操作系统的执行是划分成一个一个的时间片的,每一次在时间片里面的执行的任务是选择优先级最高的队列,如果一开始这个优先级是固定的可能就很好选,但是在操作系统里面这个优先级是动态变化的,随着执行变化的,所以每一次如果要变化,就可以使用优先队列来维护,每一次进或者出都动态着在优先队列里面变化。在游戏中也有使用到,比如攻击对象,也是一个优先队列。所以优先队列比较适合处理一些动态变化的问题,当然对于静态的问题也可以求解,比如求解1000个数字的前100位出来,最简单的方法就是排序了,,但是这样多此一举,直接构造一个优先队列,然后出的时候出一百次最大的元素即可。这个时候算法的复杂度就是,如果使用优先队列可以降到的级别。
| 入队 | 出队 | |
|---|---|---|
| 普通数组 | ||
| 顺序数组 | ||
| 堆 |
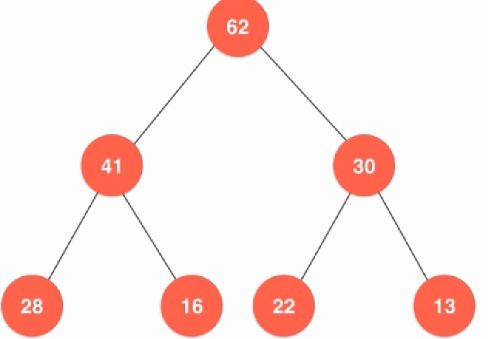
现在就要用堆来实现一个优先队列堆一般都是树形结构:


template
class MaxHeap {
private:
item *data;
int count = 0;
public:
MaxHeap(int capacity){
data = new item[capacity + 1];
count = 0;
}
~MaxHeap(){
delete[] data;
}
int size(){
return count;
}
bool isEmpty(){
return count == 0;
}
};
对于插入一个元素其实也很简单,直接放到最后然后再一步一步的浮上来。新加入的那个元素和他的父亲对比,如果是大于它父亲那么就交换,只到是不大于或者是到了1。因为如果是小于父亲节点那就本身是正确的,如果不终止,再往下比那就是比较其他的元素了,但是其他元素本来就是正确的,所以不需要比较直接结束好了。
void shiftUp(int index) {
while (index > 1 && data[index / 2] < data[index]) {
swap(data[index / 2], data[index]);
index /= 2;
}
}
void insert(item number) {
assert(count + 1 <= capacity);
data[count + 1] = number;
count++;
shiftUp(count);
}
这样就完成了插入。对于弹出最大的元素就有点边界问题要讨论了。这是一个完全二叉树,所以只有左节点没有右节点,所以首先先要判断是不是有做孩子,也就是越界的问题了,如果没有就继续判断有没有右孩子,有的话就左右孩子比较咯,哪个大就拿哪个出来,在把最大的拿出来和原节点比较即可。这里就需要一个额外的变量了。
void shiftDown(int index) {
while (2 * index <= count) {
int change = 2 * index;
if (change + 1 < count && data[change + 1] > data[change]) {
change++;
}
if (data[change] <= data[index]) {
break;
}
swap(data[change], data[index]);
index = change;
}
}
item pop() {
assert(count > 0);
item target = data[1];
swap(data[1], data[count]);
count--;
shiftDown(1);
return target;
}
这样就完成了弹出,弹出的就是最大的数字。事实上这样是可以直接做排序操作的。
现在使用的堆数据结构,是通过不断的交换元素来达到符合堆这个数据结构的目的,但是如果堆里面的元素不是数字,而是字符串或者是很长很长的其他复杂的数据结构,那么交换起来效率就很低,而且这样的话索引起来也有难度。为了解决这些问题,于是就引入了索引堆来解决:

每一个元素加上一个索引值
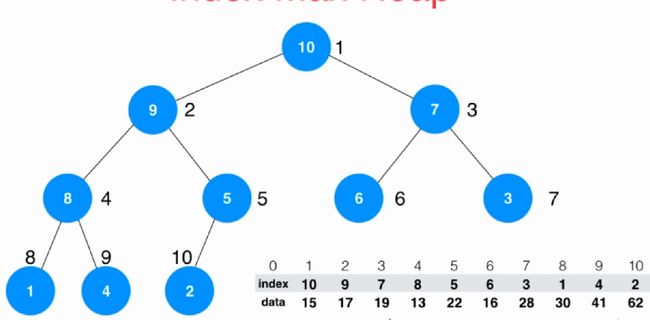
首先是对于索引堆的创建,我们不仅仅是要一个存储数据的数组,还要一个存储索引的数组,因为最后改变的是使用索引,索引对应下的数组是不变的。:
template
class IndexHeap {
private:
item *indexes;
item *data;
int count;
int capacity;
shiftDown和shiftUp操作其实就是变一下,把交换的对象换成索引即可:
void shiftUp(int k) {
while (k > 1 && data[indexes[k / 2]] < data[indexes[k]]) {
swap(indexes[k / 2], indexes[k]);
k /= 2;
}
}
void shitDown(int k) {
while (2 * k <= count) {
int change = 2 * k;
if (change + 1 <= count && data[indexes[change]] < data[indexes[change + 1]]) {
change++;
}
if (data[indexes[change]] <= data[indexes[k]]) {
break;
}
swap(indexes[change], indexes[k]);
k = change;
}
}
弹出和插入都是一样的:
void insert(int i, item itemNumber) {
assert(count + 1 <= capacity);
assert(i + 1 >= 1 && i + 1 < capacity);
i++;
data[i] = itemNumber;
indexes[++count] = i;
shiftUp(count);
}
item extractMax(){
item num = data[indexes[1]];
swap(indexes[1], indexes[count]);
count -- ;
shitDown(1);
return num;
}
主要的变化就是对于改变对应索引下的一个元素。改变了之后,我们要知道这个元素的索引是在这个堆的第几个位置才可以进行shift操作,之后还要进行shifDown和shiftUp操作,因为不知道它是可以上浮还是下沉。
void change(int i, item itemNumber){
i += 1;
data[i] = itemNumber;
for (int j = 1; j <= count; ++j) {
if (indexes[j] == i){
shiftUp(j);
shitDown(j);
return;
}
}
}
但是这个种改变方法最差的情况下是,最后还可以使用一种反向查找的方法进行改进,可以将复杂度提升到。使用一个reverse数组存储当前索引所在的位置,只有在修改了元素之后就可以直接用的复杂度从reverse中取出来了。所以有reverse[index[i]] = i,reverse[index]就可以找到当前的元素的位置了。修改代码很简单,reverse和index是绑定在一起的,所以只要index变的地方reverse也要变的。
template
class IndexMinHeap{
private:
Item *data;
int *indexes;
int *reverse;
int count;
int capacity;
void shiftUp( int k ){
while( k > 1 && data[indexes[k/2]] > data[indexes[k]] ){
swap( indexes[k/2] , indexes[k] );
reverse[indexes[k/2]] = k/2;
reverse[indexes[k]] = k;
k /= 2;
}
}
void shiftDown( int k ){
while( 2*k <= count ){
int j = 2*k;
if( j + 1 <= count && data[indexes[j]] > data[indexes[j+1]] )
j += 1;
if( data[indexes[k]] <= data[indexes[j]] )
break;
swap( indexes[k] , indexes[j] );
reverse[indexes[k]] = k;
reverse[indexes[j]] = j;
k = j;
}
}
public:
IndexMinHeap(int capacity){
data = new Item[capacity+1];
indexes = new int[capacity+1];
reverse = new int[capacity+1];
for( int i = 0 ; i <= capacity ; i ++ )
reverse[i] = 0;
count = 0;
this->capacity = capacity;
}
~IndexMinHeap(){
delete[] data;
delete[] indexes;
delete[] reverse;
}
int size(){
return count;
}
bool isEmpty(){
return count == 0;
}
void insert(int index, Item item){
assert( count + 1 <= capacity );
assert( index + 1 >= 1 && index + 1 <= capacity );
index += 1;
data[index] = item;
indexes[count+1] = index;
reverse[index] = count+1;
count++;
shiftUp(count);
}
Item extractMin(){
assert( count > 0 );
Item ret = data[indexes[1]];
swap( indexes[1] , indexes[count] );
reverse[indexes[count]] = 0;
reverse[indexes[1]] = 1;
count--;
shiftDown(1);
return ret;
}
int extractMinIndex(){
assert( count > 0 );
int ret = indexes[1] - 1;
swap( indexes[1] , indexes[count] );
reverse[indexes[count]] = 0;
reverse[indexes[1]] = 1;
count--;
shiftDown(1);
return ret;
}
Item getMin(){
assert( count > 0 );
return data[indexes[1]];
}
int getMinIndex(){
assert( count > 0 );
return indexes[1]-1;
}
bool contain( int index ){
return reverse[index+1] != 0;
}
Item getItem( int index ){
assert( contain(index) );
return data[index+1];
}
void change( int index , Item newItem ){
assert( contain(index) );
index += 1;
data[index] = newItem;
shiftUp( reverse[index] );
shiftDown( reverse[index] );
}
};
堆可以解决的一些问题,首先,就是使用堆来实现优先队列,实现一些选择优先级最高的任务执行。可以作为一些低级工具来实现一些高级数据结构。
Tree
二叉树
二叉树比较常用的地方就是查找了,其实就是类似于二分查找法,把数据分成两份,使用这样的复杂度来进行查找搜索,但是这样就要求这个数组是有序的。比较常用的实现就是查找表的实现。如果使用顺序数组进行查找,使用的复杂度是,相对应的插入元素也是要,因为它要遍历所有的元素找到相对应的位置然后插入。但是二分搜索树就更好一些,插入删除查找都是的复杂度。所以,二分搜索树不仅可以查找数据,还可以高效的插入删除等等,效率很高,适合动态维护数据。而且这种方便的数据结构也可以很好的回答数据关系之间的问题。
二分搜索树首先是一颗二叉树:

template
class BST{
private:
struct Node{
Key key;
Value value;
Node *left;
Node *right;
Node(Key key, Value value){
this->key = key;
this->value = value;
this->left = this->right = NULL;
}
};
Node *root;
int count;
public:
BST(){
root = NULL;
count = 0;
}
~BST(){
//TODO
}
int size(){
return count;
}
bool isEmpty(){
return count == 0;
}
};
对于插入其实也很简单。首先和当前根节点比较,如果小于就往左边递归,大于就往右边递归,当当前节点是NULL的时候就到达了递归终点,这个时候已经到头了,new一个新的节点返回当前节点即可。
void insert(Key key, Value value){
root = insert(root, key, value);
}
private:
Node *insert(Node *node, Key key, Value value){
if (node == NULL){
count ++;
return new Node(key, value);
}
if (node->key == key){
node->value = value;
} else if(key < node->key){
node->left = insert(node->left, key, value);
} else{
node->right = insert(node->right, key, value);
}
return node;
}
二叉树的包含,查找其实都很类似,都是小于往左边找,大于往右边找,只是返回值不一样,操作很常规,比较复杂的是删除操作,要旋转之类的。
Value *search(Node *node, Key key){
if (NULL == node){
return NULL;
} else if(node->key == key){
return &(node->value);
} else if(key < node->key){
return search(node->left, key);
} else{
return search(node->right, key);
}
}
bool contain(Node *node, Key key){
if (NULL == node){
return false;
}
if (node->key == key){
return true;
} else if(key < node->key){
return contain(node->left, key);
} else{
return contain(node->right, key);
}
}
};
以上方法都是放在了私有方法里面的,要调用只需要在public里面加上调用即可:
Value *search(Key key){
return search(root, key);
}
bool contain(Key key){
return contain(root, key);
}
对于search的返回值,其实见仁见智,返回node,固定的一个值都可以。但是如果返回的是一个node,那么调用的时候就需要用户知道程序的结构,比如这道直观node节点是啥才能拿出来,这样封装性就不好了;如果返回的是一个值,那么如果为空的时候就回不来了,所以把它的指针作为返回值。
二叉树的遍历方式有三种,前序遍历,中序遍历和后续遍历。前序遍历先访问当前节点,再访问左右节点;中序遍历先访问左节点,再访问自身,最后右节点;后序遍历先访问左右子树最后才访问自身节点。


如果是前序遍历,那么输出的位置就是第一个园点的位置。中序遍历也是一样:

void preOrder(Node *node){
if (node != NULL){
cout << node->value;
preOrder(node->left);
preOrder(node->right);
}
}
void inOrder(Node *node){
if (node != NULL){
inOrder(node->left);
cout << node->value;
inOrder(node->right);
}
}
void postOrder(Node * node){
if (node != NULL){
postOrder(node->left);
postOrder(node->right);
cout << node->value;
}
}
没有什么难度的。注意到后序遍历是左右才到中间,所以我们可以使用这种方法来对对整棵树进行释放。
void destory(Node *node){
if (node != NULL){
destory(node->left);
destory(node->right);
delete node;
count --;
}
}
之前我们遍历二叉树都是往深处遍历,都是遍历完一颗子树再遍历其他子树,所以又叫深度遍历。对于遍历方式还有另外一种,就是广度优先遍历,对应到二叉树里面就是层序遍历。先遍历完树的一层再遍历下一层。这种遍历方式没有往深处遍历到底,而是更关注广度的遍历。要实现这种遍历就需要使用到队列,事实上很多广度优先遍历都是用队列来实现,图的广度也是这样实现。
void levelOrder(){
queue q;
q.push(root);
while (!q.empty()){
Node *p = q.front();
q.pop();
cout << p->value;
if (p->left){
q.push(p->left);
}
if (p->right){
q.push(p->right);
}
}
}
这样很容易就实现了。二叉树的删除操作应该是属于二叉树操作里面比较难的部分,难的不是因为·删除本身,而是在于删除之后要怎么保持树的性质,所以是需要旋转。首先从一个最简单的问题开始,求二叉树最大值和最小值。

Key minimum() {
assert(count != 0);
Node *node = minimum(root);
return node->key;
}
Key maximum(){
assert(count != 0);
Node *node = maximum(root);
return node->key;
}
最大值和最小值都是一样。删除最小值,删除最小值有两种情况,如果这个最小值刚刚好没有任何节点,删除就很简单,如果是有的话那就需要一些操作了。


Node *removeMax(Node *node){
if (node->right == NULL){
Node *left = node->left;
delete node;
count --;
return left;
}
node->right = removeMax(node->right);
return node;
}
Node *removeMin(Node *node){
if (node->left == NULL){
Node *right = node->right;
delete node;
count --;
return right;
}
node->left = removeMin(node->left);
return node;
}
其实差不多的。最大值只会有左孩子,最小值只有右孩子。回到删除节点,对于只有右孩子,因为右孩子本来就大于当前节点,只有左孩子也是一样的。最难的就是左右孩子都有的情况,这样就尴尬了:

Node *remove(Node *node, Key key){
if ( node == NULL){
return NULL;
} else if (key < node->key){
node->left = remove(node->left, key);
} else if (key > node->key){
node->right = remove(node->right, key);
} else{
if (node->left == NULL){
Node *right = node->right;
delete node;
count --;
return right;
} else if (node->right == NULL){
Node *left = node->left;
delete node;
count --;
return left;
} else{
Node *delNode = node;
Node *successor = new Node(minimum(node->right));
count ++;
successor->right = removeMin(node->right);
successor->left = node->left;
delete delNode;
count --;
return successor;
}
}
}
首先判断一下是不是只有左子树和右子树,如果只是有一边,那么可以直接把那一边拉上去,如果是两边都有,那就需要找到右边的最小值,代替要删除的节点。这里有一个陷阱,使用successor得到最小的节点之后,后面又删除了,这样就会得到一个空指针,我们只是要得到它并不是要删除,这个时候我们应该要复制一份过来,不能直接就拉过来。
以上的操作都是把二叉树当成一个查找表来实现的,但是二叉树还有一个很好的性质,二叉树是有很好的顺序性,所以二叉树不仅仅可以用来实现查找,还可以找最小值最大值,前驱后继等等。但是二叉树并不是一成不变的,各种元素的插入顺序的不同是可以导致二叉树的结构不一样,如果数据是基本有序的,插入基本就是一个链表的形状了,退化成了一个顺序链表。改进方法后面会提到红黑树AVL树这些更加高级的数据结构。
并查集
这个数据结构并不算高级的数据结构,但是在后面的图会用到来判断是否形成环,如果两个节点的根是相同的,那么就可以判断这两个节点是同一组的了,也就是已经连在了一起。之前的堆,二叉树都是树形的结构,而这个并查集也算是一种树形结构,但是和上述的两种不太一样。并查集可以解决的问题有很多,首先就是连接问题:
首先要知道一个并查集要支持什么操作,并查集主要支持两个操作,,连接和查找操作。
用元素的下标是不是相同来表示这两个元素是不是连接的:

class unionFind {
private:
int *id;
int count;
public:
unionFind(int n) {
count = n;
id = new int(n);
for (int i = 0; i < n; ++i) {
id[i] = i;
}
}
~unionFind() {
delete[] id;
}
一开始大家都是各自为政,没有组团,所以都是不一样的,直接按照序列号即可。查找就是很简单了,就是直接返回id[]即可。
int find(int p) {
assert(p >= 0 && p <= count);
return id[p];
}
判断是不是连在一起的,直接找到当前属于的下标再比较即可,
void unionElements(int p, int q){
int pID = find(p);
int qID = find(q);
if (pID == qID){
return;
}
for (int i = 0; i < count; ++i) {
if (id[i] == pID){
id[i] = qID;
}
}
}
连接其实就是把两个堆连在一起,扫描下面的坐标相同的元素赋值即可,赋值那边赋值都可以。这种并查集查找很快,也叫quickUnion。
UF_version1::unionFind uF = UF_version1::unionFind(10);
uF.unionElements(1, 2);
uF.unionElements(5, 4);
uF.unionElements(3, 1);
cout << uF.isConnected(4, 5) << endl;
上面这一种实现方法虽然实现查找的时候很快,但是实现并操作的时候很慢,需要进行遍历。并查集的另一种实现方式,而这种实现方式是后面实现并查集的一种常规实现方式。将每一个元素看成是一个节点,如果两个元素是一起的,那么这两个元素是一个指向另一个的。

int find(int p){
assert(p >= 0 && p <= count);
while (parent[p] != p){
p = parent[p];
}
return p;
}
bool isConnected(int p, int q){
return find(p) == find(q);
}
void unionElements(int p, int q){
int pRoot = find(p);
int qRoot = find(q);
if (pRoot == qRoot){
return;
}
parent[pRoot] = qRoot;
}
不断向上找到自己的根,自己等于自己的就是当前的根了,如果不是就向下寻找,直到找到为止。这个时候的合并效率就不低了。注意到代码中的构造函数中有一个ecplicit,因为在c++中单个参数的构造函数是存在有隐式的转换的,加上这个关键字就可以禁止了,只能显示的构造,比如String = "Hello";就是一种隐式构造。
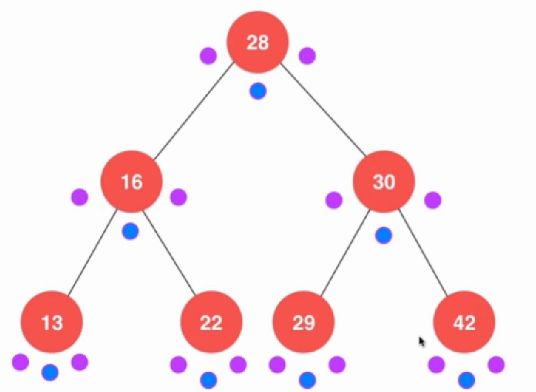
对于这种并查集,还是有优化空间的:

比如这两个堆要和在一起,如果是9合到另外一个,


private:
int *parent;
int *sz;
int count;
增加一个sz的数组存储当前这个集合的数量,用于后面插入的比较,哪个大就插哪个。只要改变一下unionElements就好了,其他的不用变。
void unionElements(int p, int q) {
int pRoot = find(p);
int qRoot = find(q);
if (pRoot == qRoot) {
return;
}
if (sz[pRoot] < sz[pRoot]){
parent[pRoot] = qRoot;
sz[qRoot] += sz[pRoot];
} else{
parent[qRoot] = pRoot;
sz[pRoot] += sz[qRoot];
}
}
其实基于数量的优化还不是最优的,如果一个堆过于分散那么合并起来的效率不是很高的,所以还有一种改进方法,就是对比两者的层数插入即可。并查集的线路压缩,以上的插入很多时候有些随机的成分,如果对这个线路的结构进行调整会快很多。这种方法就叫路径压缩。

int find(int p) {
assert(p >= 0 && p <= count);
while (parent[p] != p) {
parent[p] = parent[parent[p]];
p = parent[p];
}
return p;
}
没了,路径压缩就这样。当前节点指向他的根就好了,而find就是找到它的根。递归求解即可。在经过了路径压缩的优化之后查找的复杂度几乎就是复杂度了。
最后附上github地址:https://github.com/GreenArrow2017/DataStructure/tree/master/DataStucture