图同构(graph isomorphism)算法(1)
挖坑。
顺便吐槽,latex换行不能,图片巨大化,缺少自动保存,不小心点了个后退白写半个钟头,这是我熟悉的csdn??
简介
对于同一个图,我们可以用各种不同的形式来描述,这些形式都具有相同数目的边,具有相同数目的顶点,它们有着一一对应的关系,对应的顶点具有相同的连接性。这些图的不同形式,我们称之为图同构。
直观来说,如果图 G1,G2 顶点和边数量相同,且边(具有方向性,即有向图)的连接性相同,这两个图定义为同构。可以认为,G1的点是由G2中的点映射得到。
随着上世纪八九十年代一大批(应用)数学家投入到对图论中这个问题的研究,各种研究成果也层出不穷。重要的是应用能很快投入实际。从图像处理识别到视频动态分析,从生物高分子学到文档语言处理,图论中的这个问题也成为相对热门的研究对象。
图同构问题一般可以分为四个不同的研究种类:精确图完全同构、精确子图同构、不精确图完全同构、不精确子图同构。证明已后面三者是NP-Complete问题,第一类问题还没有定论,一般认为是NP问题。这个blog的系列主要研究精确图同构问题。
以图a和图b为例:
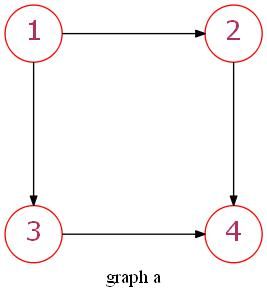
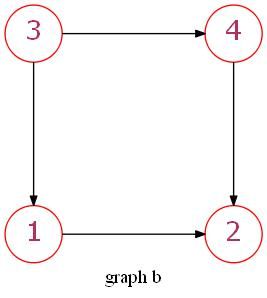
不言而喻,从图b到图a存在着一组映射:
因此两图是同构的。这就是exact matching。
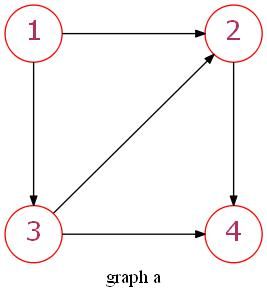
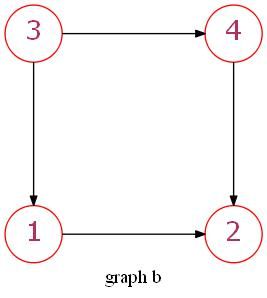
子图同构问题,顾名思义描述的是图b能否与图有向a的某个子图同构。还是以上述两个图为例,在图a中增加一条3到2的有向边。此时图a的子图(subgraph)a’和图b同构(显然)。
算法框架
1971年的ACM杂志上,刊登了一篇被人广泛引用的论文。埃因霍温大学的C Bron,对无向图的Maximal Clique问题做了一点微小的工作,然后地位就不知道高到哪里去了。过了40年,某学者在IEEE上发图同构综述,还把这篇论文尊为鼻祖。也许有人要问了,我们前面看的不是有向图吗,为什么要放一篇八竿子打不着关系的文章上来,发ranka是不是也要凑字数凑引文啊?
说毫无关系也是不对的。看下这篇Finding All Cliques of an Undirected Graph,70年代的行文风格简单粗暴,上来也没有像今天写论文或是本文这样缠缠绵绵的引用和简介,intro只有一句话:不在任意一个完全子图里面的完全子图(又称为团,Clique),称之为Maximal Clique(最大团)。然后立刻放出求最大团的两个算法,就像啪啪两枪直刺心脏,毫无一句废话。技巧有二:第一叫做backtracing(回溯),第二叫做branch & bound(剪枝)。虽然目标不同,但这就是解决图同构问题的基本框架(之一)了。两个技巧被后世的高中生们学了去,在OI界大杀特杀,这又是后话。
第一个算法也是无比brute,维持一个搜索状态,不断将点加入到有可能的点集中,直到无法继续扩展。(2b continued…)
在搜索的基础上,我们可以写一个简单的处理同构问题的框架。以刚才的例子来说,图同构最后得到的结果是一串序列: 3,4,1,2 ,代表b图对a图的映射关系。因此可以进行如下的搜索过程:
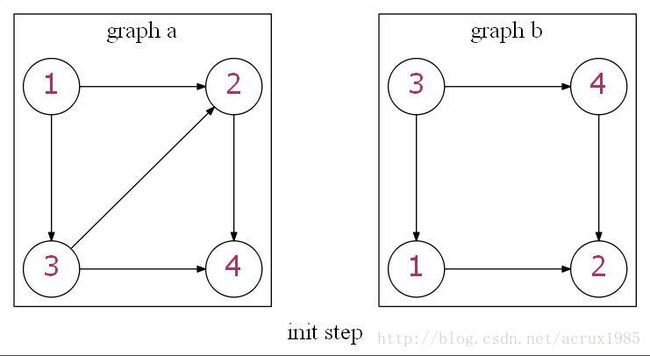
上图为初始状态,搜索节点为空,用 {} 表示,先假定a图的搜索顺序为 {1,2,3,4} ,最后形成的搜索结果应为 {(1,bs1),(2,bs2),(3,bs3),(4,bs4)} ,其中 sn 代表b图点搜索的顺序。
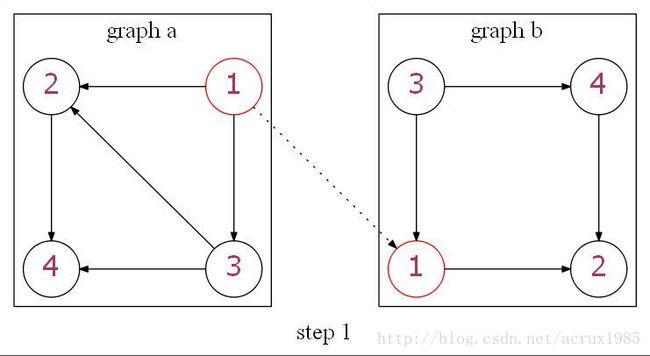
第一步,将b图中的节点1加入搜索,与a图中的节点1对应。映射关系用红色表示。状态为 {(1,1)}
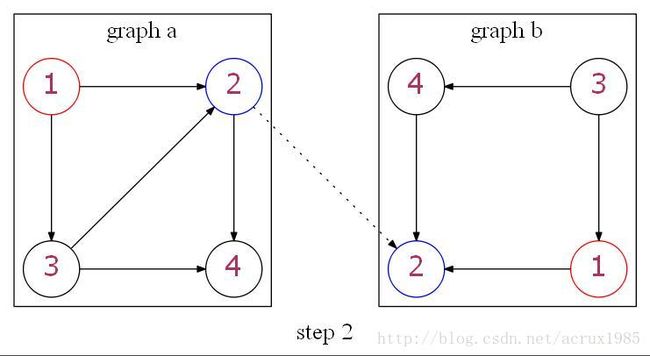
第二步,加入b图中的节点2。因为两个图中1到2都存在一条有向边,所以目前这个状态没有问题。状态为 {(1,1),(2,2)}
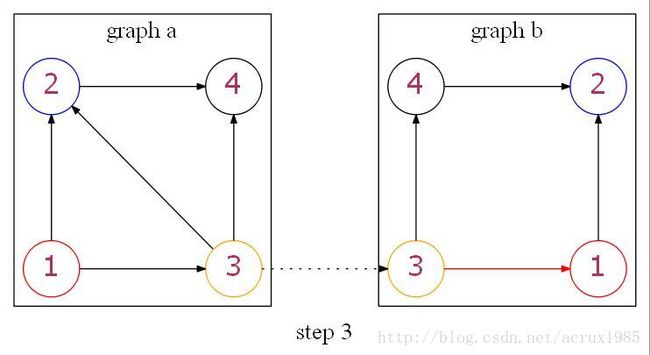
第三步,加入b图中的节点3。检查边的情况,发现图b中红色的边与图a中相对应的边连通性不同,即图a应有一条边从3指向1而实际情况不同。因此搜索回溯,回到第二步中的状态 {(1,1),(2,2)} ,再继续往下加入节点4形成新的状态 {(1,1),(2,2),(3,4)} 。这里检查的准则是,只要当前搜索到的b子图中存在某条边,对应的a子图中就应该存在相对应的边,这样就能够得到b和a中的某个子图同构。
有搜索基础就知道,这其实就一个深度优先搜索(DFS)。以此类推,最后得到完全匹配的状态 {(1,3),(2,4),(3,1),(4,2)}
这是一个比较简单的搜索,但是效率显然低下。问题出在没有利用图a的任何一条性质,而是简单的从1,2…..一直到n搜索a,造成搜索树的大量分叉。那就改改吧!图a本身可以用dfs生成一个图的搜索前序。这样的好处是可以尽快将不可能的情况进行剪枝。直观的来说,a的子图里面边越多,限定的条件也就越多,剪枝的效率越高。所以a的搜索顺序应遵循两个原则:1、出入度多的在前面。2、按照前序。
以下,用生成的数据做了一组简略的测试。图a有15个节点,30条边,图b有15个节点,39条边,测试在图b中找到图a的同构子图。以下图没有双向边,没有点指向本身的圈。对于每个图,数据格式第一行为n m,代表图的节点数量和边数量。下面m行u v 代表从u到v存在有向边。
15 30
1 3
1 4
1 5
1 14
2 12
3 9
3 10
3 11
4 2
4 3
4 10
4 11
5 2
5 10
6 7
6 10
7 11
8 4
8 14
9 4
9 11
9 15
10 2
10 7
12 1
12 11
13 1
13 8
14 9
14 1115 39
11 5
11 10
11 3
11 13
4 8
5 1
5 9
5 6
10 4
10 5
10 9
10 6
3 4
3 9
7 14
7 9
14 6
15 10
15 13
1 10
1 6
1 2
9 4
9 14
8 11
8 6
12 11
12 15
13 1
13 6
4 1
9 6
2 3
4 12
11 4
7 12
5 7
8 2
4 15
最后用VS2012测试得到结果如下:
算法1遍历1477个状态,算法2遍历171个状态。符合预期。
而在下面这个例子中,两个算法的效率差异是惊人的:
20 50
1 14
2 18
3 10
4 3
4 9
4 11
4 18
5 2
5 12
5 15
6 7
6 8
6 13
7 8
7 15
8 1
9 1
9 12
9 15
11 1
11 2
11 5
11 8
11 14
11 15
11 20
12 6
12 19
13 2
13 16
13 18
14 7
14 12
15 18
16 1
16 3
16 12
16 14
16 19
17 2
17 9
17 10
18 3
18 5
18 6
18 8
18 9
19 8
20 9
20 1020 64
11 15
18 4
16 13
17 16
17 2
17 6
17 4
10 18
10 1
10 7
12 3
12 5
12 20
3 5
3 7
5 11
2 11
2 1
2 7
6 11
6 18
6 10
6 5
6 15
6 7
6 8
1 12
1 19
20 18
20 14
20 4
15 3
15 1
7 4
14 11
14 16
14 1
14 15
14 19
9 18
9 2
9 13
4 16
4 10
4 12
4 5
4 2
19 5
8 2
8 13
5 13
17 14
14 6
14 7
6 13
2 15
3 8
16 15
12 8
20 2
13 3
20 6
7 1
1 20
针对50条边的图a,算法1搜索了2834001个状态,而改良后的搜索只遍历了953个状态!在稀疏图面前,这个剪枝还是相当强的。(待续)