3D游戏技术 - 大型3D地图优化渲染技术
技术简介:
如果需要渲染一个大型3D地图,由于数据量,需要渲染的东西非常多,所以尤其一些慢一点的机器就会变得非常卡。
如下面这些会造成帧率(FPS)下降的图:
这样的图:

还有这样的魔兽世界的图:

还有这样的图:

上图我是指她的背景图啦,O(∩_∩)O~
到底暴雪是如何让这些场景流畅地渲染的呢?
那就必须想办法提高渲染速度,也就是帧率(FPS)要提高,才能使得游戏流畅。
像魔兽这样大型的游戏具体是用什么技术的,那不敢确定,但是会用到的相关技术会有:
1 地图分块剔除
2 kd树
3 BSP树
4 LOD技术
等等,最后把场景优化到极致,才能创造出伟大的游戏。每一种技术都需要挺长篇幅介绍的,本文就分析第一种技术:地图分块剔除技术(Sub-Grid Culling)
地图分块剔除技术分析
1 3D投影剔除(Frustum Culling)
把一个大地图分隔成由多个小地图实现,那么本来需要调用一次就画成的地图,现在需要多次调用,但是我们可以利用Frustum Culling(3D投影剔除-我觉得比较满意的翻译名词吧)技术优化渲染。
Frustum Culling的思路是:
每一个小块地图,我们计算相对应的AABB包围体;
如果这个AABB和Frustum不相交,那么就不用画这个小块地图。
Frustum是下面的形状:
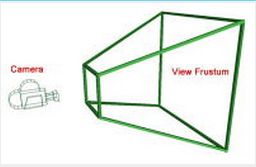
如下图:大三角形代表Frustum,小方格代表小块地图,灰色小方格代表与Frustum相交,需要渲染,但是白色地带就不与Frustum相交,所以都不需要渲染,那么我们可以看出这就省了很多渲染内容,也就速度大大提高了。

也可以不使用分格和AABB方法进行Frustum Culling:
把所有的组成地图的三角形输入显卡,让显卡自动裁剪不在Frustum中的三角形。但是其实这个裁剪发生在Clipping Stage,就差不多是渲染管道的最后的渲染工作了,那么这些不用渲染你的三角形就会通过大部分渲染管道,如:Vertex Shader,那么就浪费了很多计算呢时间。
使用分格和AABB的方法就可以简单的利用一个AABB相交测试就可以丢弃一个不用渲染的小块地图数据了,效率可以更大地提高。
掌握这个分块的数量也很重要。如下图:

这样就是更加精细的分块了。需要渲染的面积更小,但是相对而言节省的也不多,而精细的分块也需要花费更多的计算时间,如:画基本元几何图形的函数调用次数也更多了,还有AABB相交测试也增多;
所谓过犹不及,要掌握好度很重要。到底分多少个小地图块是合适的,就需要实际分析了。
而且这里的Frustum Culling主要是节省了vertex shading的计算时间,如果一个图形是主要花费在pixel shanding上的话,比如大量的particles需要渲染,那么这种Frustum Culling方法就不会有太大的提速效果。
2 小地图数据结构体:
首先需要定义一个结构体来表示小地图块的数据,如下:
struct SubGrid
{
ID3DXMesh* mesh;
AABB box;
// For sorting.
bool operator<(const SubGrid& rhs)const;
const static int NUM_ROWS = 33;
const static int NUM_COLS = 33;
const static int NUM_TRIS = (NUM_ROWS-1)*(NUM_COLS-1)*2;
const static int NUM_VERTS = NUM_ROWS*NUM_COLS;
};主要功能就是这个比较操作符,是根据该小地图块和Camera的距离来比较大小的。把所有的小地图块都按照离Camera的距离由进到远排序,那么就方便由进到远(前到后)的渲染方式渲染。这种方式的渲染可以提高速度,尤其是在渲染管道中pixel shader渲染是瓶颈的时候,当然如果vertex shader是瓶颈,那么就提高不明显。
基本原理就是:
1 更新像素(pixel)的时候,渲染器都进行了depth testing(深度测试),只有在距离镜头进的物体才会被渲染,否则就不渲染。
2 如果排序好的物体,前面渲染的物体都是距离近的,那么后面渲染的物体如果被前面的物体挡住了,那么就根本不需要渲染了。
3 如果不是排序好的话,前面渲染了距离远的物体,那么后面渲染的物体距离镜头更加近,就需要重新更新当前像素,造成重复浪费渲染。
bool Terrain::SubGrid::operator<(const SubGrid& rhs) const
{
D3DXVECTOR3 d1 = box.center() - gCamera->pos();
D3DXVECTOR3 d2 = rhs.box.center() - gCamera->pos();
return D3DXVec3LengthSq(&d1) < D3DXVec3LengthSq(&d2);
}
3 计算出Frustum:
Frustum是从投影矩阵抽出来的。因为Frustum就是由投影矩阵定义的,也可以说两者都在实际上是一致的:
如投影示意图:
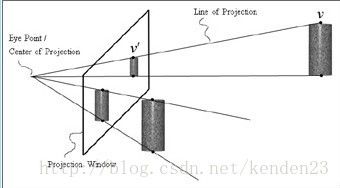
Frustum:
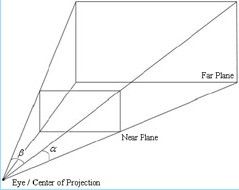
其实是概念上不一样,但是实际上一样的东西。不过应用也不一样。
下面是从投影矩阵抽出Frustum的程序:
void Camera::buildWorldFrustumPlanes()
{
// Note: Extract the frustum planes in world space.
D3DXMATRIX VP = mView * mProj;
D3DXVECTOR4 col0(VP(0,0), VP(1,0), VP(2,0), VP(3,0));
D3DXVECTOR4 col1(VP(0,1), VP(1,1), VP(2,1), VP(3,1));
D3DXVECTOR4 col2(VP(0,2), VP(1,2), VP(2,2), VP(3,2));
D3DXVECTOR4 col3(VP(0,3), VP(1,3), VP(2,3), VP(3,3));
// Planes face inward.
mFrustumPlanes[0] = (D3DXPLANE)(col2); // near
mFrustumPlanes[1] = (D3DXPLANE)(col3 - col2); // far
mFrustumPlanes[2] = (D3DXPLANE)(col3 + col0); // left
mFrustumPlanes[3] = (D3DXPLANE)(col3 - col0); // right
mFrustumPlanes[4] = (D3DXPLANE)(col3 - col1); // top
mFrustumPlanes[5] = (D3DXPLANE)(col3 + col1); // bottom
for(int i = 0; i < 6; i++)
D3DXPlaneNormalize(&mFrustumPlanes[i], &mFrustumPlanes[i]);
}其中的数学原理却是比较复杂的,需要相当的图形学基础。
4 Frustum和AABB包围体的碰撞检测
下面是检测Frustum六个平面与AABB包围体碰撞的代码:
bool Camera::isVisible(const AABB& box)const
{
// Test assumes frustum planes face inward.
D3DXVECTOR3 P;
D3DXVECTOR3 Q;
// N *Q *P
// | / /
// |/ /
// -----/----- Plane -----/----- Plane
// / / |
// / / |
// *P *Q N
//
// PQ forms diagonal most closely aligned with plane normal.
// For each frustum plane, find the box diagonal (there are four main
// diagonals that intersect the box center point) that points in the
// same direction as the normal along each axis (i.e., the diagonal
// that is most aligned with the plane normal). Then test if the box
// is in front of the plane or not.
for(int i = 0; i < 6; ++i)
{
// For each coordinate axis x, y, z...
for(int j = 0; j < 3; ++j)
{
// Make PQ point in the same direction as the plane normal on this axis.
if( mFrustumPlanes[i][j] >= 0.0f )
{
P[j] = box.minPt[j];
Q[j] = box.maxPt[j];
}
else
{
P[j] = box.maxPt[j];
Q[j] = box.minPt[j];
}
}
// If box is in negative half space, it is behind the plane, and thus, completely
// outside the frustum. Note that because PQ points roughly in the direction of the
// plane normal, we can deduce that if Q is outside then P is also outside--thus we
// only need to test Q.
if( D3DXPlaneDotCoord(&mFrustumPlanes[i], &Q) < 0.0f ) // outside
return false;
}
return true;
}因为Frustum有六个平面,所以要循环检测六次,只要任何一次AABB包围体是在平面负面的,那么就返回false,表示没有在Frustum内。
这样检测可以不用考虑这些平面并不是无限延伸的,而是当作一般平面来检测,简化了计算。
因为每个平面四面都有被其他平面包围着,如果AABB与该平面在Frustum外相交,那么AABB就会是在其他四个平面任一个平面的负面,所以会在和其他平面检测的时候,检测出来该AABB不在Frustum内。
可以参考我另外一个关于平面和AABB包围体碰撞检测的博客:http://blog.csdn.net/kenden23/article/details/16916327
5 最后就是渲染:
void Terrain::draw()
{
// Frustum cull sub-grids.
std::list visibleSubGrids;
for(UINT i = 0; i < mSubGrids.size(); ++i)
{
if( gCamera->isVisible(mSubGrids[i].box) )
visibleSubGrids.push_back(mSubGrids[i]);
}
// Sort front-to-back from camera.
visibleSubGrids.sort();
mFX->SetMatrix(mhViewProj, &gCamera->viewProj());
mFX->SetTechnique(mhTech);
UINT numPasses = 0;
mFX->Begin(&numPasses, 0);
mFX->BeginPass(0);
for(std::list::iterator iter = visibleSubGrids.begin(); iter != visibleSubGrids.end(); ++iter)
HR(iter->mesh->DrawSubset(0));
mFX->EndPass();
mFX->End();
} 渲染步骤:
1 先检测是否可见,即是否与Frustum相交,相交的放入一个list容器中。
std::list visibleSubGrids;
for(UINT i = 0; i < mSubGrids.size(); ++i)
{
if( gCamera->isVisible(mSubGrids[i].box) )
visibleSubGrids.push_back(mSubGrids[i]);
}
2 按照离镜头的远近排序:
// Sort front-to-back from camera.
visibleSubGrids.sort();
3 最后就是逐个小地图块渲染
for(std::list::iterator iter = visibleSubGrids.begin(); iter != visibleSubGrids.end(); ++iter)
HR(iter->mesh->DrawSubset(0));
其他代码是Shader渲染设置。
6 实现地图分块剔除技术关键步骤总结:
1 地图分块,定义好保存数据的结构体,包含AABB包围体
2 根据投影矩阵,计算Frustum
3 检测Frustum和小地图块的AABB包围体是否碰撞,保存好碰撞的小地图块
4 根据离镜头远近排序可见的(即碰撞的)小地图块,按循序渲染
下面是应用了本技术的效果图:

