rtthread 线程调度的启动 (基于cortex m3系列芯片)
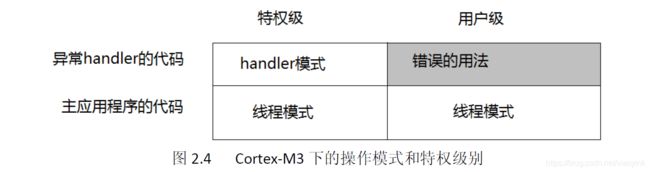
cortex m3具有用户级和特权级两种特权等级 以及 handle模式(处理中断时运行在handle模式)和线程模式 两种模式,其中用户级特权只能运行在线程模式。
如下图(摘自cortex m3权威指南):
经过测试rtthread所有的代码都是运行在特权级下的,只不过开机启动的时候特权级线程模式使用的堆栈指针是MSP,调用rt_system_scheduler_start()函数之后 开始线程调度,这些线程包括用户自定义的线程,以及main()函数线程,以及空闲线程也都是特权级,只不过它们使用的堆栈指针是PSP,为了区分,我下面的博客把这种使用PSP寄存器的特权级线程,称之为用户级线程,但要注意实际上它们是特权级的(这个freertos不一样,freertos里面的这种线程都是运行在用户级的)。另外handle模式也就是中断处理函数都是特权级的无法改变,并且使用的都是MSP。证据如下:

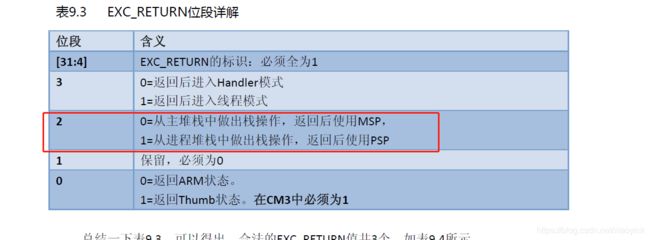
rt_system_scheduler_start()函数在触发PendSV中断之后,会通过BX LR语句,进行返回,返回后的处理器状态决定于LR寄存器中保存的EXC_RETURN的值,可以看到通过PendSV通过ORR指令把bit2 置1,也就是使用PSP,但并没有改变处理器运行的特权级。个人觉得如果想切换到用户级,需要在调用触发PendSV中断之前,手动修改CONTROL寄存器,但rtthread并没有修改。
所以rtthread用户自定义的线程也可以访问所有的特殊寄存器,例如读写PRIMASK寄存器,关闭全局中断等,并且rtthread好像从来没有使用过SVC指令进行系统调用,因为不需要,它本来就是特权级。
cortex-m3的soc启动之后(这里以stm32芯片为例),默认运行在特权级的线程模式,
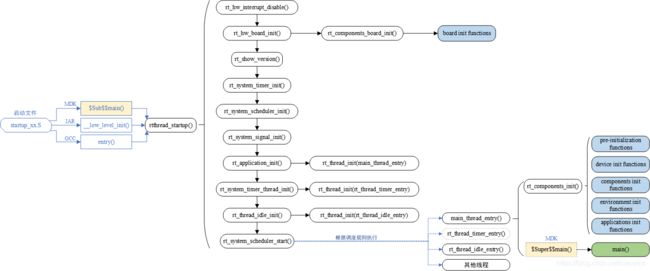
图片来源rtthread官网
在芯片启动后运行完汇编启动文件(主要是初始化MSP堆栈寄存器,以及运行复位中断处理函数,完成初始化),会跳转到$Sub$$main()函数,并按照上图调用rtthread_startup()函数,注意这里全部运行在特权级的线程模式。其中rt_application_init()会初始化用户级线程也就是我们用户自己编写的main()函数,但是初始化之后并没有运行,知道rt_system_scheduler_start()函数调用之后,打开调度器,开始运行用户级线程,特权级线程至此结束,之后的特权级基本运行在handle模式而不是线程模式。
下面我们来分析rt_system_scheduler_start()函数:
void rt_system_scheduler_start(void)
{
register struct rt_thread *to_thread;
rt_ubase_t highest_ready_priority;
/* 其实到这里也就两个用户级线程,一个main函数,一个空闲线程,这里to_thread肯定是前面
* rt_application_init()函数所初始化的main函数线程
*/
to_thread = _get_highest_priority_thread(&highest_ready_priority);
#ifdef RT_USING_SMP
to_thread->oncpu = rt_hw_cpu_id();
#else
rt_current_thread = to_thread;
#endif /*RT_USING_SMP*/
rt_schedule_remove_thread(to_thread);
to_thread->stat = RT_THREAD_RUNNING;
/* switch to new thread */
#ifdef RT_USING_SMP
rt_hw_context_switch_to((rt_ubase_t)&to_thread->sp, to_thread);
#else
/*最终调用了以下函数,这个函数好像只在这里调用了一次,由于首次调用,所以不用指定from线程
*因为运行到这里仍然是特权级的线程模式,并没有用户级线程在运行,所以from线程还不存在,也不用
*为from线程保存现场
*/
rt_hw_context_switch_to((rt_ubase_t)&to_thread->sp);
#endif /*RT_USING_SMP*/
/* never come back */
}rt_hw_context_switch_to()函数是汇编函数如下:
rt_hw_context_switch_to:
LDR R1, =rt_interrupt_to_thread
STR R0, [R1]
/* set from thread to 0 */
LDR R1, =rt_interrupt_from_thread
MOV R0, #0
STR R0, [R1]
/* set interrupt flag to 1 */
LDR R1, =rt_thread_switch_interrupt_flag
MOV R0, #1
STR R0, [R1]
/* set the PendSV exception priority */
LDR R0, =SHPR3
LDR R1, =PENDSV_PRI_LOWEST
LDR.W R2, [R0,#0] /* read */
ORR R1, R1, R2 /* modify */
STR R1, [R0] /* write-back */
LDR R0, =ICSR /* trigger the PendSV exception (causes context switch) */
LDR R1, =PENDSVSET_BIT
STR R1, [R0]
/* restore MSP */
/*重置MSP寄存器为中断向量表中指定的值,因为特权级线程模式执行到这里也就到头了,永远也不会返回
*了,所以可以重置MSP寄存器清空堆栈,供以后中断处理函数使用
*/
LDR r0, =SCB_VTOR
LDR r0, [r0]
LDR r0, [r0]
NOP
MSR msp, r0
/* enable interrupts at processor level */
/* 打开中断之后会立即调到PendSV中断处理函数,用来切换到main函数线程*/
CPSIE F
CPSIE I
/* never reach here! */ /* 根据官方注释可知,永远不会到达这里了 */PendSV_Handler中断函数如下:
PendSV_Handler:
/* disable interrupt to protect context switch */
MRS R2, PRIMASK
CPSID I
/* get rt_thread_switch_interrupt_flag */
LDR R0, =rt_thread_switch_interrupt_flag
LDR R1, [R0]
CBZ R1, pendsv_exit /* pendsv aLReady handled */
/* clear rt_thread_switch_interrupt_flag to 0 */
MOV R1, #0
STR R1, [R0]
LDR R0, =rt_interrupt_from_thread
LDR R1, [R0]
CBZ R1, switch_to_thread /* skip register save at the first time */
MRS R1, PSP /* get from thread stack pointer */
STMFD R1!, {R4 - R11} /* push R4 - R11 register */
LDR R0, [R0]
STR R1, [R0] /* update from thread stack pointer */
switch_to_thread:
LDR R1, =rt_interrupt_to_thread
LDR R1, [R1]
LDR R1, [R1] /* load thread stack pointer */
LDMFD R1!, {R4 - R11} /* pop R4 - R11 register */
MSR PSP, R1 /* update stack pointer */
pendsv_exit:
/* restore interrupt */
MSR PRIMASK, R2
ORR LR, LR, #0x04 /* 这句话保证PendSV中断返回之后,自动运行在用户级线程模式,其实是特权级线程模式 */
BX LR可以看到执行完rt_hw_context_switch_to()函数,特权级线程模式到此结束,PendSV中断会返回用户级线程模式,开始main函数 用户级线程,在main()为用户自定义函数,用户可以在main()中初始化和启动其他用户级线程,之后系统会借助实时时钟的中断、以及rt_thread_sleep()、rt_mq_recv()等函数实现用户级线程切换,其实都是通过调用rt_schedule()实现线程切换的,rt_schedule()函数的实质也是通过出发PendSV中断,来实现线程切换的,也就是之后无论是在用户级线程模式(用户级线程主动调用rt_thread_sleep()、rt_mq_recv()等函数请求切换线程),还是特权级handle模式(实时时钟中断中请求切换线程),都通过触发PendSV中断来实现线程切换,也就是处理器好像再也没有回到特权级线程模式了,都是在特权级handle模式。
这里贴出来rt_schedule()的代码:
void rt_schedule(void)
{
rt_base_t level;
struct rt_thread *to_thread;
struct rt_thread *from_thread;
/* disable interrupt */
level = rt_hw_interrupt_disable();
/* check the scheduler is enabled or not */
if (rt_scheduler_lock_nest == 0)
{
rt_ubase_t highest_ready_priority;
if (rt_thread_ready_priority_group != 0)
{
/* need_insert_from_thread: need to insert from_thread to ready queue */
int need_insert_from_thread = 0;
to_thread = _get_highest_priority_thread(&highest_ready_priority);
if ((rt_current_thread->stat & RT_THREAD_STAT_MASK) == RT_THREAD_RUNNING)
{
if (rt_current_thread->current_priority < highest_ready_priority)
{
to_thread = rt_current_thread;
}
else
{
need_insert_from_thread = 1;
}
}
if (to_thread != rt_current_thread)
{
/* if the destination thread is not the same as current thread */
rt_current_priority = (rt_uint8_t)highest_ready_priority;
from_thread = rt_current_thread;
rt_current_thread = to_thread;
RT_OBJECT_HOOK_CALL(rt_scheduler_hook, (from_thread, to_thread));
if (need_insert_from_thread)
{
rt_schedule_insert_thread(from_thread);
}
rt_schedule_remove_thread(to_thread);
to_thread->stat = RT_THREAD_RUNNING | (to_thread->stat & ~RT_THREAD_STAT_MASK);
/* switch to new thread */
RT_DEBUG_LOG(RT_DEBUG_SCHEDULER,
("[%d]switch to priority#%d "
"thread:%.*s(sp:0x%08x), "
"from thread:%.*s(sp: 0x%08x)\n",
rt_interrupt_nest, highest_ready_priority,
RT_NAME_MAX, to_thread->name, to_thread->sp,
RT_NAME_MAX, from_thread->name, from_thread->sp));
#ifdef RT_USING_OVERFLOW_CHECK
_rt_scheduler_stack_check(to_thread);
#endif
if (rt_interrupt_nest == 0)
{
extern void rt_thread_handle_sig(rt_bool_t clean_state);
rt_hw_context_switch((rt_ubase_t)&from_thread->sp,
(rt_ubase_t)&to_thread->sp);
/* enable interrupt */
rt_hw_interrupt_enable(level);
#ifdef RT_USING_SIGNALS
/* check signal status */
rt_thread_handle_sig(RT_TRUE);
#endif
goto __exit;
}
else
{
RT_DEBUG_LOG(RT_DEBUG_SCHEDULER, ("switch in interrupt\n"));
rt_hw_context_switch_interrupt((rt_ubase_t)&from_thread->sp,
(rt_ubase_t)&to_thread->sp);
}
}
else
{
rt_schedule_remove_thread(rt_current_thread);
rt_current_thread->stat = RT_THREAD_RUNNING | (rt_current_thread->stat & ~RT_THREAD_STAT_MASK);
}
}
}
/* enable interrupt */
rt_hw_interrupt_enable(level);
__exit:
return;
}详细的线程切换分析可以参见我的另一篇博客:https://blog.csdn.net/xiaoyink/article/details/102695471