数值计算方法--线性方程组的数值解法(3) 追赶法(Thomas),选择主元(Pivoting),求逆(Inversion)
追赶法
追赶法适用于三对角矩阵,形如 ( X X 0 0 0 X X X 0 0 0 X X X 0 0 0 X X X 0 0 0 X X ) \begin{pmatrix}X&X&0&0&0\\X &X& X& 0& 0\\0&X&X&X&0\\0&0&X&X&X\\0&0&0&X&X\end{pmatrix} ⎝⎜⎜⎜⎜⎛XX000XXX000XXX000XXX000XX⎠⎟⎟⎟⎟⎞对于100×100矩阵,使用的空间约为原先的33:1。对这种矩阵做杜丽特分解(或克洛特分解)。假设中间第K行存储着ck,dk,ek三个元素,类似 ( . . . . . . . . . . . . . . . . . . . . . c k − 1 d k − 1 e k − 1 0 . . . . . . 0 c k d k e k . . . . . . . . . ) \begin{pmatrix}...&...&...&...&...&...\\...&c_{k-1}&d_{k-1}&e_{k-1}&0&...\\...&0&c_k&d_k&e_k&...\\...&&&&&...\end{pmatrix} ⎝⎜⎜⎛...............ck−10...dk−1ck...ek−1dk...0ek............⎠⎟⎟⎞执行操作 r o w k ← r o w k − ( c k − 1 / d k − 1 ) × r o w ( k − 1 ) row ~k \leftarrow row~k-(c_{k-1}/d_{k-1})\times row(k-1) row k←row k−(ck−1/dk−1)×row(k−1)执行杜丽特分解时,发现该行的e并未受到影响。把算子λ=ck-1/dk-1存储在以前ck-1的位置。所以得到如下程序片段(暂不能运行)。
for k = 2:n
lambda = c(k-1)/d(k-1);
d(k) = d(k) - lambda*e(k-1);
c(k-1) = lambda;
end
以此类推,可以想象得到L矩阵对角线元素对应的下一行从左上到右下分别是c1,c2…cn-1。用这个单位下三角矩阵解出中间向量y。由于每次只需减掉一项,代码较前述LU分解简单。
y(1) = b(1)
for k = 2:n
y(k) = b(k) - c(k-1)*y(k-1);
end
顺理成章,使用回代法根据y、U解出x。U中的en没有改变,而dn由于消去过程与原矩阵不同。
x(n) = y(n)/d(n);
for k = n-1:-1:1
x(k) = (y(k) - e(k)*x(k+1))/d(k);
end
matlab函数实现如下(可运行):
function [c,d,e] = ThomasDec(c,d,e)
% calculating LU decomposition of tridiagonal matrix A = [c\d\e].
n = length(d);
for k = 2:n
lambda = c(k-1)/d(k-1);
d(k) = d(k) - lambda*e(k-1);
c(k-1) = lambda;
end
function x = ThomasSol(c,d,e,b)
% Solves A*x = b where A = [c\d\e] is the LU
n = length(d);
for k = 2:n % Forward substitution
b(k) = b(k) - c(k-1)*b(k-1);
end
b(n) = b(n)/d(n); % Back substitution
for k = n-1:-1:1
b(k) = (b(k) -e(k)*b(k+1))/d(k);
end
x = b;
例如,解书(《数值计算方法》,马东升等著,机械工业出版社)P85例题:
在命令行中输入
c = [-1 -2 -3];
d = [2 3 4 5];
e = [-1 -2 -2];
b=[3 1 0 -5];
[c,d,e]=ThomasDec(c,d,e);
x = ThomasSol(c,d,e,b)
得到结果一致。

同理,此类形状的对称矩阵都可以用追赶法得出数值解。这里有一个[f\e\d\e\f]型的系数矩阵构成的线性方程 ( 6 − 4 1 0 0 . . . − 4 6 − 4 1 0 . . . 1 − 4 6 − 4 1 . . . . . . . . . . . . . . . . . . . . . . . 0 1 − 4 6 − 4 . . . 0 0 1 − 4 7 ) ( x 1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 x 10 ) = ( 3 0 0 0 0 0 0 0 0 4 ) \begin{pmatrix}6&-4&1&0&0&...\\-4&6&-4&1&0&...\\1&-4&6&-4&1&...\\&&...\\&&....\\&&....\\&&...\\&&...\\...&0&1&-4&6&-4\\...&0&0&1&-4&7\end{pmatrix}\begin{pmatrix}x_1\\x_2\\x_3\\x_4\\x_5\\x_6\\x_7\\x_8\\x_9\\x_{10}\end{pmatrix}=\begin{pmatrix}3\\0\\0\\0\\0\\0\\0\\0\\0\\4\end{pmatrix} ⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛6−41......−46−4001−46.................1001−4−410016−4.........−47⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛x1x2x3x4x5x6x7x8x9x10⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞=⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛3000000004⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞
复杂处在杜丽特分解的每一步需要同时对两行进行操作,但总体原理是一样的。代码如下:
function [d,e,f] = ThomasDec5(d,e,f)
% LU decomposition of pentadiagonal matrix A = [f\e\d\e\f].
n = length(d);
for k = 1:n-2
lambda = e(k)/d(k);
d(k+1) = d(k+1) - lambda*e(k);
e(k+1) = e(k+1) - lambda*f(k);
e(k) = lambda;
lambda = f(k)/d(k);
d(k+2) = d(k+2) - lambda*f(k);
f(k) = lambda;
end
lambda = e(n-1)/d(n-1);
d(n) = d(n) - lambda*e(n-1);
e(n-1) = lambda;
function x = ThomasSol5(d,e,f,b)
% Solves A*x = b where A = [f\e\d\e\f] is the LU
% decomposition of the original pentadiagonal(五对角矩阵) A.
n = length(d);
b(2) = b(2) - e(1)*b(1); % Forward substitution
for k = 3:n
b(k) = b(k) - e(k-1)*b(k-1) - f(k-2)*b(k-2);
end
b(n) = b(n)/d(n); % Back substitution
b(n-1) = b(n-1)/d(n-1) - e(n-1)*b(n);
for k = n-2:-1:1
b(k) = b(k)/d(k) - e(k)*b(k+1) - f(k)*b(k+2);
end
x = b;
在命令行中打下
n = 10;
d = 6*ones(n,1); d(n) = 7;
e = -4*ones(n-1,1);
f = ones(n-2,1);
b = zeros(n,1); b(1) = 3; b(n) = 4;
[d,e,f] = ThomasDec5(d,e,f);
x = ThomasSol5(d,e,f,b)
得

变换主元
按顺序消元可能出现主元素akk(k)=0,尽管系数矩阵非奇异消元也无法进行。例如,形如方程组 1 0 − 5 x 1 + x 2 = 1 10^{-5}x_1+x_2=1 10−5x1+x2=1 x 1 + x 2 = 2 x_1+x_2=2 x1+x2=2如果不改变方程组次序,用四位浮点数的计算机高斯消去法求解,得到 ( 1 0 − 5 1 0 1 − 1 0 5 ) ( x 1 x 2 ) = ( 1 2 − 1 0 5 ) \begin{pmatrix}10^{-5}&1\\0&1-10^{5}\end{pmatrix}\begin{pmatrix}x_1\\x_2\end{pmatrix}=\begin{pmatrix}1\\2-10^5\end{pmatrix} (10−5011−105)(x1x2)=(12−105)由于只能精确4位(a11计算机未处理所以保留原样) ( 1 0 − 5 1 0 − 1 0 5 ) ( x 1 x 2 ) = ( 1 − 1 0 5 ) \begin{pmatrix}10^{-5}&1\\0&-10^5\end{pmatrix}\begin{pmatrix}x_1\\x_2\end{pmatrix}=\begin{pmatrix}1\\-10^5\end{pmatrix} (10−501−105)(x1x2)=(1−105)这样得到x2=1 x1=0,严重失真。而将上下两式颠倒重复以上动作,却能得到正确结果。可以发现,当 ∣ A i i ∣ > ∑ j = 1 , j ≠ i n ∣ A i j ∣ ( i = 1 , 2 , . . . , n ) |A_{ii}|>\sum_{j=1,j\neq i}^{n}|A_{ij}|~~~~~~(i=1,2,...,n) ∣Aii∣>j=1,j=i∑n∣Aij∣ (i=1,2,...,n)即对角占优时,颠倒操作不会再带来更优化的结果。这是列主元(行交换)高斯消去(也可用在LU分解)中使用的原则。
列主元高斯消去法
创立一个表示某行最大元素的数组s s i = m a x j ∣ A i j ∣ , i = 1 , 2 , . . . , n s_i=max_j|A_{ij}|,~~i=1,2,...,n si=maxj∣Aij∣, i=1,2,...,n两行代码算得:
for i in range(n):
s[i] = max(abs(a[i,0:n]))
在高斯消元的每一步(比方第k步),在第k列寻找 r p k = m a x j ≥ k r j k r_{pk}=max_{j\ge k}r_{jk} rpk=maxj≥krjk若不是第k行,则将k行和p行替换。每一步换行要连带标定数组s一起变换。换行代码如下:
function v = GaussSwapRows(v,i,j)
% Swap rows i and j of vector or matrix v.
temp = v(i,:);
v(i,:) = v(j,:);
v(j,:) = temp;
function x = gaussSwapPiv(A,b)
% Solves A*x = b by Gauss elimination with row pivoting.
if size(b,2) > 1; b = b'; end
n = length(b); s = zeros(n,1);
%----------设置标定数组----------
for i = 1:n
s(i) = max(abs(A(i,1:n)));
end
%---------按 需 换 行----------
for k = 1:n-1
[Amax,p] = max(abs(A(k:n,k))./s(k:n));
p = p + k - 1;
if Amax < eps
error('Matrix is singular');
end
if p ~= k
b = GaussSwapRows(b,k,p);
s = GaussSwapRows(s,k,p);
A = GaussSwapRows(A,k,p);
end
%--------------消 去 过 程---------------
for i = k+1:n
if A(i,k) ~= 0
lambda = A(i,k)/A(k,k);
A(i,k+1:n) = A(i,k+1:n) - lambda*A(k,k+1:n);
b(i) = b(i) - lambda*b(k);
end
end
end
%------------回 代 过 程----------
for k = n:-1:1
b(k) = (b(k) - A(k,k+1:n)*b(k+1:n))/A(k,k);
end
x = b;
同理,解书上一道例题
在命令行中输入
A = [0.5 1.1 3.1;
2.0 4.5 0.36;
5.0 0.96 6.5];
>> b=[6 0.02 0.96];
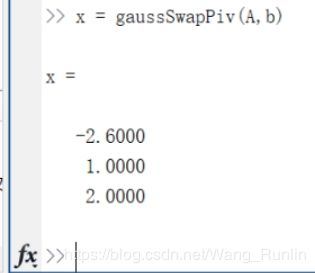
>> x = gaussSwapPiv(A,b)
结果与答案一致。
列主元LU分解
如前所述,高斯消元法可以将每一步变换当作一个初等矩阵左乘,将这些初等矩阵乘在一起得到单位下三角矩阵L,即杜丽特分解。类似地,也可以在LU分解中使用列主元方法。增加的要求是每次换行时都要有记录,以便调整常数向量的顺序。在程序中创建排列数组perm(permutation),初始值[1,2,…,n]T。每当换行,perm里数的顺序相应改变。这个数组后续传入求解函数中,将常数向量调整到同一顺序,再顺代和回代求出解。
function [A,perm] = LUdecPiv(A)
% LU decomposition of matrix A; returns A = [L\U] and ’perm’.
n = size(A,1); s = zeros(n,1);
perm = (1:n)';
%----------设 置 标 定 数 组----------
for i = 1:n; s(i) = max(abs(A(i,1:n))); end
%---------按 需 换 行----------
for k = 1:n-1
[Amax,p] = max(abs(A(k:n,k))./s(k:n));
p = p + k - 1;
if Amax < eps
error('Matrix is singular')
end
if p ~= k
s = gaussSwapRows(s,k,p);
A = gaussSwapRows(A,k,p);
perm = gaussSwapRows(perm,k,p);
end
%--------------消 去 过 程---------------
for i = k+1:n
if A(i,k) ~= 0
lambda = A(i,k)/A(k,k);
A(i,k+1:n) = A(i,k+1:n) - lambda*A(k,k+1:n);
A(i,k) = lambda;
end
end
end

命令行中输入
A = [2 -1 1;
4 2 1
2 1 2];b=[5;4;5];
[A,perm]=LUdecPiv(A);
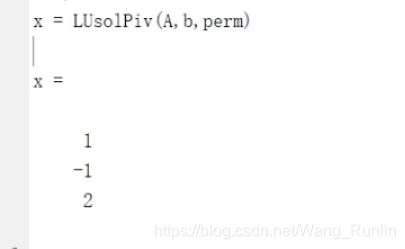
x = LUsolPiv(A,b,perm)
结果与答案一致。
求逆矩阵
使用以上众算法,可以用比伴随矩阵法更高效地求逆阵,也即对每个列向量跟随着做初等行变换。程序中直接嵌套上述已完善的LUsolPiv、LUdecPiv来实现。
function Ainv = matInv(A)
% Inverts martix A with LU decomposition.
n = size(A,1);
Ainv = eye(n); % Store RHS(right hand side) vectors in Ainv.
[A,perm] = LUdecPiv(A); % 分解 A.
% 逐一解右边的向量将结果存储在Ainv中
% replacing the corresponding RHS vector.
for i = 1:n
Ainv(:,i) = LUsolPiv(A,Ainv(:,i),perm);
end
在命令行中输入
A = [0.6 -0.4 1.0
-0.3 0.2 0.5
0.6 -1.0 0.5];
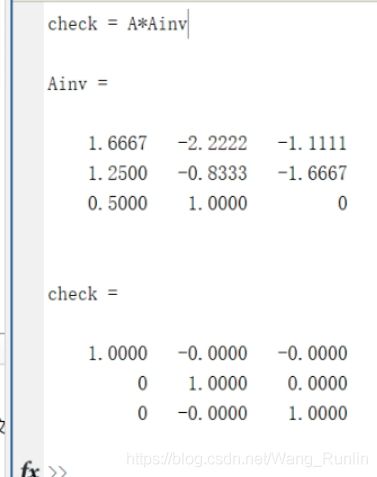
Ainv = matInv(A)
check = A*Ainv
结果表明求解正确。