Python+opencv学习记录23:分水岭算法
文章目录
- 1.算法简介
- 2.分水岭图像分割
- 2.1.获取灰度图像,二值化图像,进行降噪
- 2.2.形态学操作进一步消除噪点
- 2.3.膨胀操作获得大部分背景区域
- 2.4.距离变换获取确定的前景色
- 2.5.获取种子
- 2.6.分水岭变换
- 完整代码
1.算法简介
分水岭算法(Watershed Algorithm),是根据分水岭的构成来考虑图像的分割。现实中我们可以或者说可以想象有山有湖的景象,那么那一定是水绕山,山围水的情形。
任何灰度图像都可以看作是一个地形表面,其中高强度表示山峰和丘陵,而低强度表示山谷。用不同颜色的水(标签)填充每个孤立的山谷(局部极小值)。当水上升时,根据附近的峰(梯度),不同山谷不同的颜色的水,显然会开始融合。为了避免这种情况,你在水就要融合的地方及时增加屏障(增高水坝),你继续填满水,建造屏障,直到所有的山峰都被淹没。然后,您创建的屏障会给出分割结果。其动画演示过程如下:

2.分水岭图像分割
其步骤为:
1.先将图像进行降噪滤波;
2.将降噪后的图像转换为灰度图像;
3.将灰度图像转换为二值化图像;
4.进行形态学操作,进一步消除图像噪点;
5.使用距离变换获取确定的前景色;
6.获取我们想要的前景区域(寻找种子);
7.获取masker标签;
8.进行分水岭变换。
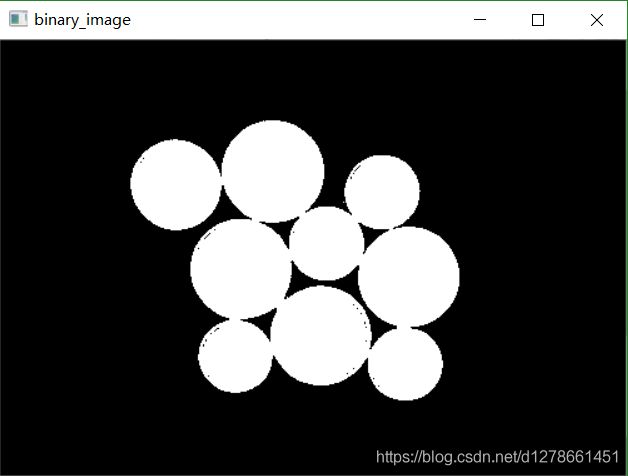
2.1.获取灰度图像,二值化图像,进行降噪
其代码为:
# 去除噪声,使用边缘保留滤波EPF,均值迁移
blur = cv.pyrMeanShiftFiltering(src, 10, 100)
# 灰度图像和二值化图像的转化
gray = cv.cvtColor(blur, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
cv.imshow("binary_image", binary)
原图为:

二值化后:
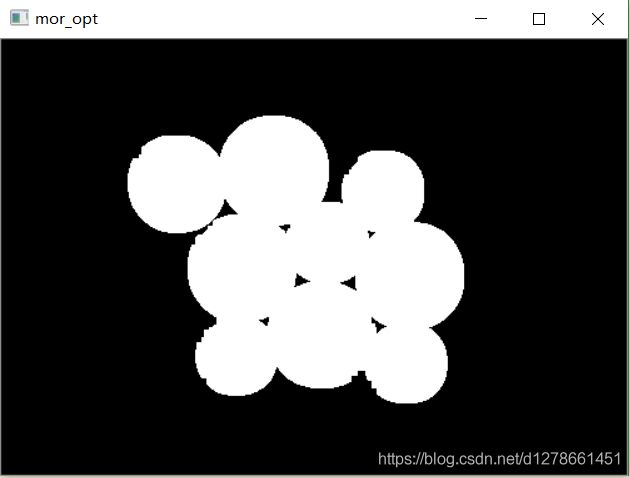
2.2.形态学操作进一步消除噪点
我们通过连续两次开操作来消除图像中的噪点,其代码为:
# 形态学操作,进一步消除图像中的噪点
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3)) # 获取结构元素
mb = cv.morphologyEx(binary, cv.MORPH_OPEN, kernel, iterations=2) # 连续两次进行开操作,消除图像中的噪点
2.3.膨胀操作获得大部分背景区域
sure_bg = cv.dilate(mb, kernel, iterations=3) # 连续3次进行彭胀操作,可以获得大部分都是背景的区域
cv.imshow("mor_opt", sure_bg)
得到的结果为:
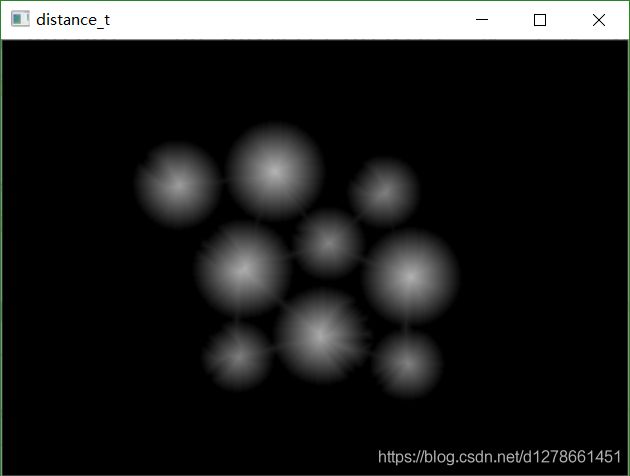
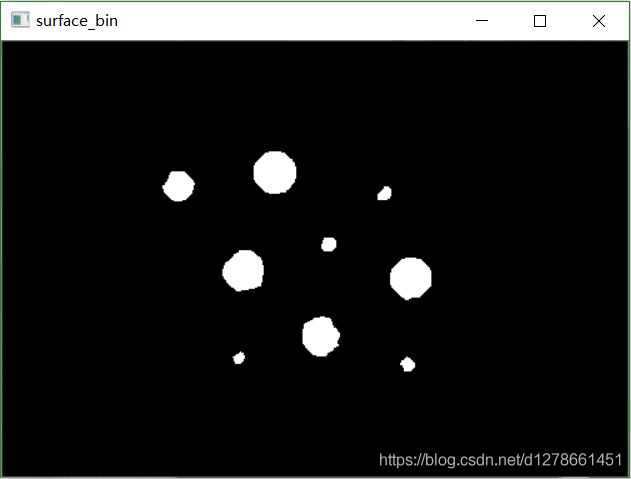
2.4.距离变换获取确定的前景色
距离变换是计算一个图像中非零像素点到最近的零像素点的距离,也就是到零像素点的最短距离。
距离变换的处理图像通常都是二值图像,而二值图像其实就是把图像分为两部分,即背景和物体两部分,物体通常又称为前景目标。通常我们把前景目标的灰度值设为255(白色),背景的灰度值设为0(黑色),所以定义中的非零像素点为前景目标,零像素点为背景。图像中前景目标中的像素点距离背景越远,那么距离就越大,如果我们用这个距离值替换像素值,那么新生成的图像中这个点越亮。下图可以解释距离变换:

# 距离变换
dist = cv.distanceTransform(mb, cv.DIST_L2, 3) # 获取距离数据结果
dist_output = cv.normalize(dist, 0, 1.0, cv.NORM_MINMAX) # 归一化到0-1
cv.imshow("distance_t", dist_output * 50)
ret, surface = cv.threshold(dist, dist.max() * 0.6, 255, cv.THRESH_BINARY) # 获取前景色
cv.imshow("surface_bin", surface)
结果为:
2.5.获取种子
surface_fg = np.uint8(surface) # 保持色彩空间一致才能进行运算,现在是背景空间为整型空间,前景为浮点型空间,所以进行转换
unknown = cv.subtract(sure_bg, surface_fg)
ret, markers = cv.connectedComponents(surface_fg) # 得到连通区域
cv.imshow("unknown", unknown)
得到的结果为:

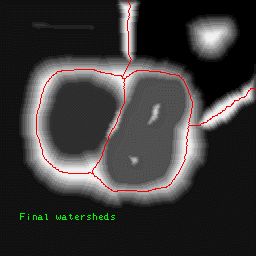
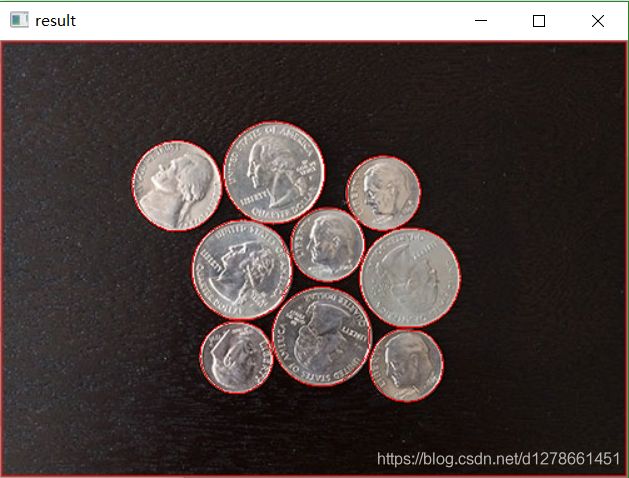
2.6.分水岭变换
# 分水岭变换
markers = markers + 1
markers[unknown == 255] = 0
markers = cv.watershed(src, markers=markers) # 获取栅栏
src[markers == -1] = [0, 0, 255] # 根据栅栏,我们对原图像进行操作,对栅栏区域设置为红色
cv.imshow("result", src)
得到的最终结果为:
完整代码
import cv2 as cv # 导入opencv模块
import numpy as np # 导入数学函数库
def watershed_demo():
print(src.shape)
# 去除噪声,使用边缘保留滤波EPF,均值迁移
blur = cv.pyrMeanShiftFiltering(src, 10, 100)
# 灰度图像和二值化图像的转化
gray = cv.cvtColor(blur, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
cv.imshow("binary_image", binary)
# 形态学操作,进一步消除图像中的噪点
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3)) # 获取结构元素
mb = cv.morphologyEx(binary, cv.MORPH_OPEN, kernel, iterations=2) # 连续两次进行开操作,消除图像中的噪点
sure_bg = cv.dilate(mb, kernel, iterations=3) # 连续3次进行彭胀操作,可以获得大部分都是背景的区域
cv.imshow("mor_opt", sure_bg)
# 距离变换
dist = cv.distanceTransform(mb, cv.DIST_L2, 3) # 获取距离数据结果
dist_output = cv.normalize(dist, 0, 1.0, cv.NORM_MINMAX) # 归一化到0-1
cv.imshow("distance_t", dist_output * 50)
ret, surface = cv.threshold(dist, dist.max() * 0.6, 255, cv.THRESH_BINARY) # 获取前景色
cv.imshow("surface_bin", surface)
surface_fg = np.uint8(surface) # 保持色彩空间一致才能进行运算,现在是背景空间为整型空间,前景为浮点型空间,所以进行转换
unknown = cv.subtract(sure_bg, surface_fg)
ret, markers = cv.connectedComponents(surface_fg) # 得到连通区域
cv.imshow("unknown", unknown)
print(ret)
# 分水岭变换
markers = markers + 1
markers[unknown == 255] = 0
markers = cv.watershed(src, markers=markers) # 获取栅栏
src[markers == -1] = [0, 0, 255] # 根据栅栏,我们对原图像进行操作,对栅栏区域设置为红色
cv.imshow("result", src)
print("------------hello python!------------")
src = cv.imread("D:/opencv3/image/coins.jpg")
cv.namedWindow("input_image", cv.WINDOW_AUTOSIZE)
cv.imshow("input_image", src)
watershed_demo()
cv.waitKey(0)
cv.destroyAllWindows() # 释放所有窗口