pytorch实战-基于ResNet神经网络
1. 数据集来源
这里利用的是cifar10数据集,具体数据集操作请参考我的另一篇博文基于LeNet网络结构实战:链接入口
2. 残差网络
作者发现,随着网络层数的增加,网络发生了退化(degradation)的现象:随着网络层数的增多,训练集loss逐渐下降,然后趋于饱和,当你再增加网络深度的话,训练集loss反而会增大。注意这并不是过拟合,因为在过拟合中训练loss是一直减小的。
当网络退化时,浅层网络能够达到比深层网络更好的训练效果,这时如果我们把低层的特征传到高层,那么效果应该至少不比浅层的网络效果差。
举例:如果一个VGG-100网络在第98层使用的是和VGG-16第14层一模一样的特征,那么VGG-100的效果应该会和VGG-16的效果相同。所以,我们可以在VGG-100的98层和14层之间添加一条直接映射(Identity Mapping)来达到此效果。
基于这种使用直接映射来连接网络不同层直接的思想,残差网络应运而生。
2.1 残差块
残差块结构图 如图1

2.2 残差块代码实现
# 残差块模型
class ResBlk(nn.Module):
def __init__(self,ch_in,ch_out,stride=1):
super(ResBlk,self).__init__()
self.conv1=nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=2,padding=1)
self.bn1=nn.BatchNorm2d(ch_out)
# 1.为了满足在汇聚点进行+操作,ch_out与输入图片的channel保持一样,才能进行+
self.conv2=nn.Conv2d(ch_out,ch_out,kernel_size=3,stride=1,padding=1)
self.bn2=nn.BatchNorm2d(ch_out)
self.extra=nn.Sequential()
# 2.不仅需要满足channel相同维度,还需要图片的h、w相同
if ch_in!=ch_out:
self.extra=nn.Sequential(
# 这里主要是通过stride来使图像维度变化
nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=stride,padding=1),
nn.BatchNorm2d(ch_out)
)
对应的forward 实现代码:
# 残差块实现
def forward(self,x):
out=F.relu(self.bn1(self.conv1(x)))
out=self.bn2(self.conv2(out))
# 与shortcut相汇输出
# 为了使经过shortcut的x:[b,ch_in,h,w]与进行两次卷积操作进行相加操作...
#...经过shortcut的维度需要进行extra操作来更改
out=out+self.extra(x)
print('out:',out.shape)
print('x:',x.shape)
out=F.relu(out)
return out
3. 完整代码实现
3.1 网络结构ResNet18
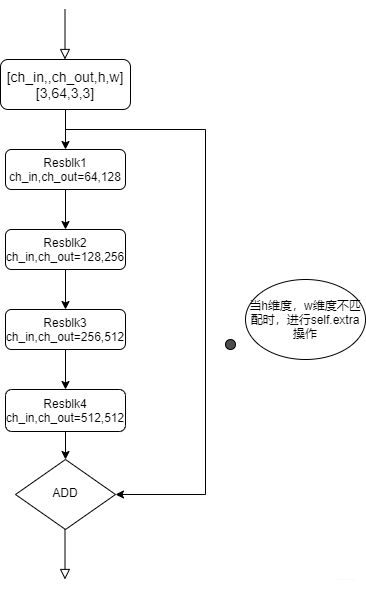
3.2 完整代码解释
(1)Resnet.py
# 定义残差网络结构
import torch
from torch import nn
from torch.nn import functional as F
# 残差块模型
class ResBlk(nn.Module):
def __init__(self,ch_in,ch_out,stride=1):
super(ResBlk,self).__init__()
self.conv1=nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=2,padding=1)
self.bn1=nn.BatchNorm2d(ch_out)
# 1.为了满足在汇聚点进行+操作,ch_out与输入图片的channel保持一样,才能进行+
self.conv2=nn.Conv2d(ch_out,ch_out,kernel_size=3,stride=1,padding=1)
self.bn2=nn.BatchNorm2d(ch_out)
self.extra=nn.Sequential()
# 2.不仅需要满足channel相同维度,还需要图片的h、w相同
if ch_in!=ch_out:
self.extra=nn.Sequential(
# 这里主要是通过stride来使图像维度变化
nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=stride,padding=1),
nn.BatchNorm2d(ch_out)
)
# 残差块实现
def forward(self,x):
out=F.relu(self.bn1(self.conv1(x)))
out=self.bn2(self.conv2(out))
# 与shortcut相汇输出
# 为了使经过shortcut的x:[b,ch_in,h,w]与进行两次卷积操作进行相加操作,经过shortcut的维度需要进行extra操作来更改
out=out+self.extra(x)
print('out:',out.shape)
print('x:',x.shape)
out=F.relu(out)
return out
class ResNet18(nn.Module):
def __init__(self):
super(ResNet18, self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, stride=3, padding=0),
nn.BatchNorm2d(64)
)
# followed 4 blocks
# [b, 64, h, w] => [b, 128, h ,w]
self.blk1 = ResBlk(64, 128, stride=2)
# [b, 128, h, w] => [b, 256, h, w]
self.blk2 = ResBlk(128, 256, stride=2)
# # [b, 256, h, w] => [b, 512, h, w]
self.blk3 = ResBlk(256, 512, stride=2)
# # [b, 512, h, w] => [b, 1024, h, w]
self.blk4 = ResBlk(512, 512, stride=2)
self.outlayer = nn.Linear(512*1*1, 10)
def forward(self, x):
"""
:param x:
:return:
"""
x = F.relu(self.conv1(x))
# [b, 64, h, w] => [b, 1024, h, w]
x = self.blk1(x)
x = self.blk2(x)
x = self.blk3(x)
x = self.blk4(x)
# print('after conv:', x.shape) #[b, 512, 2, 2]
# [b, 512, h, w] => [b, 512, 1, 1]
x = F.adaptive_avg_pool2d(x, [1, 1])
# print('after pool:', x.shape)
x = x.view(x.size(0), -1)
x = self.outlayer(x)
return x
def main():
# 小测试
blk=ResBlk(64,128,stride=2)
tmp=torch.randn(2,64,32,32)
out=blk(tmp)
print('block:',out.shape)
if __name__=='__main__':
main()
(2)main.py
import torch
from torch import nn, optim
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
from Resnet import ResNet18
# 导入数据集
def main():
batchsz=128
cifar_train=datasets.CIFAR10('cifar',True,transform=transforms.Compose([
transforms.Resize((32,32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485,0.456,0.406],
std=[0.229,0.224,0.225])
]),download=True)
cifar_train=DataLoader(cifar_train,batch_size=batchsz,shuffle=True)
cifar_test=datasets.CIFAR10('cifar',False,transform=transforms.Compose([
transforms.Resize((32,32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485,0.456,0.406],
std=[0.229,0.224,0.225])
]),download=True)
cifar_test=DataLoader(cifar_test,batch_size=batchsz,shuffle=True)
device=torch.device('cuda')
model=ResNet18().to(device)
# 计算多分类的交叉熵
criteon=nn.CrossEntropyLoss().to(device)
optimizer=optim.Adam(model.parameters(),lr=1e-3)
for epoch in range(10):
for batchidx,(x,label) in enumerate(cifar_train):
x,label=x.to(device),label.to(device)
logits=model(x)
loss=criteon(logits,label)
# backpop
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(epoch,'loss:',loss.item())
with torch.no_grad():
# test
total_correct = 0
total_num = 0
for x, label in cifar_test:
# [b, 3, 32, 32]
# [b]
x, label = x.to(device), label.to(device)
# [b, 10]
logits = model(x)
# [b]
pred = logits.argmax(dim=1)
# [b] vs [b] => scalar tensor
correct = torch.eq(pred, label).float().sum().item()
total_correct += correct
total_num += x.size(0)
# print(correct)
acc = total_correct / total_num
print(epoch, 'test acc:', acc)
if __name__=='__main__':
main()