- Microsoft 紧急修补 SharePoint 远程代码执行漏洞,应对持续网络攻击
微软紧急修复SharePoint高危漏洞并提供安全建议周日,微软发布了一个关键补丁,用于修复SharePoint中正在被恶意利用的安全漏洞,同时公布了另一个已通过"增强防护措施"修复的漏洞细节。这家科技巨头确认,目前已发现攻击者正针对本地部署的SharePointServer用户发起攻击,利用的是7月安全更新中未完全修复的漏洞。漏洞详情当前被利用的漏洞编号为CVE-2025-53770(CVSS评
- 微信小程序开发中常用的组件介绍
DTcode7
微信小程序相关微信小程序小程序移动端前端源码
微信小程序开发中常用的组件介绍基础概念组件是什么?为什么要使用组件?常用组件详解视图容器组件view示例一:基础使用示例二:绑定点击事件文本显示组件text示例三:显示动态文本图像显示组件image示例四:显示网络图片表单组件forminput示例五:简单表单导航组件navigator示例六:页面跳转列表组件scroll-view示例七:垂直滚动列表实际开发中的技巧结合实际经验的案例分析案例一:商
- 天津那个医院能做亲子鉴定(附2024年价格汇总)
中量亲鉴生物
在天津这座古老而现代交织的城市里,亲情的纽带往往承载着无数家庭的温暖与期待。当血缘的疑问悄然浮现,天津亲子鉴定便成为了解开谜团、守护亲情的一把钥匙。它不仅仅是一项科学技术的应用,更是对家庭关系的一次深刻探索与确认。在这个充满信任与理解的过程中,每一份样本的提取,每一次数据的比对,都凝聚着对真相的渴望和对家庭的尊重。天津亲子鉴定,以科学的名义,为爱导航,让亲情在真相的光芒下更加坚固。一、血样采集1.
- [论文]基于强化学习的控制输入非线性水下机器人自适应神经网络控制
王莽v2
机器人神经网络神经网络算法控制器
[论文]基于强化学习的控制输入非线性水下机器人自适应神经网络控制摘要本文研究了在水平面内运动的全驱动自主水下机器人的轨迹跟踪问题。在我们的控制设计中考虑了外部干扰、控制输入非线性和模型不确定性。基于离散时间域的动力学模型,两个神经网络(包括一个临界神经网络和一个作用神经网络)被集成到我们的自适应控制设计中。引入临界神经网络来评价设计的控制器在当前时间步长内的长期性能,并利用作用神经网络来补偿未知动
- 2021-09-19心态的变化
笑笑狗尾草
昨天那通失望的心情,就是老甘偏让我回去开例会,结果说的却是一个患者的投诉事件,我失望透顶,为什么不当面找人对质,就说是医生的不对,罢了,这种地方,也说不清,不过对于单位的归属感,立马尽失。所以从现在开始,我要让自己成为机器人,不要带有任何感情,对人对事,都要如此。还有时刻就保持那种心态,如果生命只有九十天的时候,你会做什么,有什么态度对人对事,就那种心态,我觉得它会让我坚强而自主,这种心态蛮好的,
- YOLOv5改进策略|YOLOv5 ⾃主检查和跟踪相关的任务|基于视觉的⽆⼈⽔⾯舰艇⾃主导航 极端海洋条件
斌擎人工智能官方账号
YOLO人工智能YOLOv5目标检测计算机视觉深度学习自主导航
目录介绍解决方案目标检测的视觉结论视觉感知是无人水面舰艇(USV)自主导航的重要组成部分,特别是与自主检查和跟踪相关的任务。这些任务涉及基于视觉的导航技术来识别导航目标。海洋环境中极端天气条件下的能⻅度降低使得基于视觉的方法难以正常工作。为了克服这些问题,本文提出了一种基于视觉的自主导航框架,用于在极端海洋条件下跟踪目标物体。所提出的框架由一个集成感知管道组成,该管道使用生成对抗网络(GAN)来消
- Windows10-ltsc-2019 使用 PowerShell 安装安装TranslucentTB教程(不通过微软商店安装)
lkm0522
microsoftTranslucentTB透明任务栏
Windows10-ltsc-2019使用PowerShell安装安装TranslucentTB教程(不通过微软商店安装)下载v2020.4(最后一个兼容1809的版本):TranslucentTB安装包(下载不了上面有安装包)安装依赖项(如未安装):#下载并安装x86版本的VCLibsInvoke-WebRequest-Uri"https://aka.ms/Microsoft.VCLibs.x8
- AI新纪元:2025年深度学习技术突破与行业应用全景
像素笔记
杂谈人工智能深度学习ai自动驾驶工业数字化转型未来趋势技术创新
2025年,人工智能技术迎来爆发式增长,大模型、生成式AI和多模态技术持续突破,人形机器人量产元年正式开启,自动驾驶商业化进程加速,工业数字化转型全面铺开。这些进展不仅重塑了技术边界,更在多个行业创造了实际价值,推动AI从实验室走向产业化。本文将深入剖析2025年深度学习与AI领域的核心技术突破、行业应用案例及未来发展趋势,为技术从业者提供全面视角。一、深度学习核心技术突破:大模型、生成式AI与多
- 龙虎榜——20250721
上证指数放量收阳线,依然强势沿着5天均线向上。受雅下重大工程的消息刺激,传统基建相关产业链有异动,带动情绪上涨,个股下跌明显偏少。深证指数较前几天放量,走势依然沿着5天线持续缓慢上涨,这就是慢牛的走势。2025年7月21日龙虎榜行业方向分析1.医药(创新药+器械主导)•代表标的:•永安药业、昂利康、一品红、维康药业2.高端制造(机器人+新材料)•代表标的:•达意隆(智能包装设备)、长盛轴承(精密轴
- Windows批量修改文件属性方法
lkm0522
windows
标题使用icacls命令(推荐批量操作)打开管理员权限的命令提示符(CMD)执行以下命令:cmdicacls"文件夹路径"/grant用户名:(OI)(CI)F/T/C参数说明:(OI):对象继承-适用于文件夹(CI):容器继承-适用于子文件夹F:完全控制权限/T:递归处理所有子文件夹和文件/C:即使遇到错误也继续执行示例icacls"D:\EFI\Microsoft\Boot"/grantAdm
- PyTorch的基础概念和复杂模型的基本使用
香蕉可乐荷包蛋
AI大模型项目中的使用pytorch人工智能python
文章目录一、PyTorch基础概念二、复杂模型的学习使用一、PyTorch基础概念张量(Tensor)操作:张量是PyTorch中的基本数据结构,类似于NumPy的数组,但支持GPU加速常见操作包括创建张量、张量运算、索引、切片等importtorch#创建张量x=torch.randn(3,4)y=torch.zeros(3,4)#张量运算z=x+y自动求导(Autograd):PyTorch的
- XSS介绍及利用
0x00dream
常见漏洞webjavascript
XSS——跨站脚本攻击XSS介绍及利用**XSS的三种类型****构造xss脚本****自动化XSS——BeEF**XSS介绍及利用1、XSS介绍XSS(crosssitescripting)跨站脚本攻击,恶意攻击者往web页面里插入恶意script代码,当用户浏览该页面时,代码就会被执行2、XSS原理在HTML中常用到字符实体,对常用到的字符实体没有进行转译,导致完整的标签出现,在可输入的文本框
- ros2 server 可以设置命令同时获取位置
一个自定义服务SetCommandGetPose.srv:请求字段float32command响应字段geometry_msgs/Posepose服务端收到请求后,把command缓存下来,再把当前位姿填进响应返回。为了便于演示,位置用一个简单计数器模拟;你可以把它替换成TF、里程计或SLAM输出。一、创建功能包bash复制ros2pkgcreate--build-typeament_cmakep
- XSS的介绍
lq_ioi_pl
xss前端
目录XSS的原理反射型XSSDOM型XSS存储型XSS常见的XSSPayloadXSS的原理XSS全称跨站脚本(CrossSiteScripting),为避免与层叠样式表(CascadingStyleSheets,CSS)的缩写混淆,故缩写为XSS。这是一种将任意Javascript代码插入到其他Web用户页面中执行以达到攻击目的的漏洞。攻击者利用浏览器的动态展示数据功能,在HTML页面里嵌入恶意
- 2024年番茄免费小说邀请码如何填写,番茄小说邀请码怎么填写呢(填写流程)
凌风导师
2024年番茄免费小说的邀请码填写步骤相对简单,以下是详细的填写流程:番茄免费小说邀请码填写步骤打开应用:首先,确保你已经下载并安装了最新版本的番茄免费小说APP。进入相关页面:打开APP后,根据APP的界面布局,你可能需要点击底部导航栏中的【福利】、【我的】或【任务】等按钮,以找到填写邀请码的入口。不同版本的APP界面可能略有不同,但通常邀请码填写入口都在比较显眼的位置。寻找填写邀请码选项:在进
- Excel处理控件Aspose.Cells教程:使用 Python 在 Excel 中进行数据验
CodeCraft Studio
文档管理控件excelpython开发语言
Excel中的数据验证功能可确保用户在工作表中输入正确的数据类型。无论您是构建动态模板、收集结构化数据还是准备财务报告,添加验证都有助于避免错误并保持一致性。在本文中,我们将探讨如何使用Python在Excel中实现数据验证。让我们深入研究实际的解决方案,以自动执行Excel验证任务-而无需安装MicrosoftExcel。Aspose.Cells最新版下载Excel中的数据验证是什么?Excel
- 深度学习方法生成抓取位姿与6D姿态估计的完整实现
ZPC8210
ROS深度学习人工智能
如何将GraspNet等深度学习模型与6D姿态估计集成到ROS2和MoveIt中,实现高精度的机器人抓取系统。1.系统架构text[RGB-D传感器]→[物体检测与6D姿态估计]→[GraspNet抓取位姿生成]→[MoveIt运动规划]→[执行抓取]2.环境配置2.1安装依赖bash#安装PyTorch(根据CUDA版本选择)pip3installtorchtorchvisiontorchaud
- LeetCode 72. 编辑距离(Edit Distance)| 动态规划详解
72.编辑距离题目描述给你两个单词word1和word2,请计算将word1转换为word2所需的最少操作数。你可以对一个单词进行以下三种操作:插入一个字符删除一个字符替换一个字符✅示例输入:word1="horse",word2="ros"输出:3解释:horse->rorse(替换h为r)rorse->rose(删除r)rose->ros(删除e)解题思路:动态规划(DP)✅状态定义dp[i]
- 前端学习路线推荐
oldfifteen
第一阶段:HTML+CSS:HTML进阶、CSS进阶、div+css布局、HTML+css整站开发、JavaScript基础:Js基础教程、js内置对象常用方法、常见DOM树操作大全、ECMAscript、DOM、BOM、定时器和焦点图。JS基本特效:常见特效、例如:tab、导航、整页滚动、轮播图、JS制作幻灯片、弹出层、手风琴菜单、瀑布流布局、滚动事件、滚差视图。JS高级特征:正则表达式、排序算
- VSCode使用Jupyter完整指南配置机器学习环境
z日火
校招学习日记vscodejupyter机器学习
接下来开始机器学习部分第一步配置环境:VSCode使用Jupyter完整指南1.安装必要的扩展打开VSCode,按Ctrl+Shift+X打开扩展市场,搜索并安装以下扩展:必装扩展:Python(Microsoft官方)-Python语言支持Jupyter(Microsoft官方)-Jupyternotebook支持Pylance(Microsoft官方)-Python智能提示和语法检查推荐扩展:
- python连接数据库的方法,Python 连接数据库的多种方法
AI MIU
python连接数据库的方法
JZGKCHINAPython是一种计算机程序设计语言,它是一种动态的、面向对象的脚本语言。它是一种跨平台的,可以运行在Windows,Mac和Linux/Unix系统上。在日常使用中需要对大量数据进行数据分析,那么就必然用到数据库,我们常用的数据库有SQLServer,MySQL,Oracle,DB2,SQLite,Hive,PostgreSQL,MongoDB还有其他常用的MicrosoftA
- 应试教育——皮毛终究只是皮毛
暖姐姐的心灵鸡汤
(首先声明,这篇写作并没有在指责任何人,并不是针对任何人,而是我个人对于新一代儿童发展的期望。)夜幕降临,北京车水马龙的街道着实让人羡慕,霓虹灯的色彩斑斓让所有人深陷其中,所有人?真的吗?可能并不是——至少“校服党”们并没有“北京夜晚很美”的领悟。为什么?让我们近距离观察——一双双眼木讷地盯着座椅靠背出神,一张张面孔上映着手机反射过来的强光,一根根手指熟练却显机械地敲打着屏幕……机器人?不不不你猜
- AI执刀,外科手术的“无人驾驶”时代还有多远?
攻城狮7号
AI前沿技术要闻AI手术机器人人工智能计算机视觉深度学习
目录前言一、遥控大师时代——达芬奇的辉煌与局限二、智能学徒登场——AI开始独立思考三、遥控大师vs智能学徒四、通往“无人驾驶”手术室的漫漫长路攻城狮7号:个人主页个人专栏:《AI前沿技术要闻》⛺️君子慎独!大家好,欢迎来访我的博客!⛳️此篇文章主要介绍AI手术机器人本期文章收录在《AI前沿技术要闻》,大家有兴趣可以自行查看!⛺️欢迎各位✔️点赞收藏⭐留言!前言2025年7月,美国约翰斯·霍普金斯大
- 2024 睿抗机器人开发者大赛CAIP-编程技能赛-本科组(省赛)RC-u3题解
EarthOnline玩家
机器人java开发语言
题目:暖炉与水豚源题目地址:https://pintia.cn/problem-sets/1813039306479005696/exam/problems/type/7?problemSetProblemId=1813039385617129474问题描述给定一个N×M的矩阵,包含水豚(‘c’表示冷,‘w’表示暖)、暖炉(‘m’)和空格(’.’)。暖炉可以温暖其3×3范围内的水豚。题目保证最多只
- 特斯拉机器人来喽
玉菲炫舞
特斯拉要出机器人了,名字叫optimus,听到这个消息我很是兴奋,但也因此和朋友争执了一番。我喜欢特斯拉,是因为我把埃隆·马斯克当成我的科技偶像。我看到特斯拉的机器人兴奋也是因为这个。大概三到五年之后量产售价不到2万美元,听到这里就很兴奋,这几年要努力赚钱,希望能成为第一批用户。为什么和朋友争执呢?我说以后我要成为他的第一批用户,朋友就说机器人有什么好的?我说当然好啦,他能够驾驶车辆,还能够拿起重
- 2024 睿抗机器人开发者大赛CAIP-编程技能赛-本科组(国赛)
Cheneyacc
算法c++数据结构
RC-u1大家一起查作弊分数15在今年的睿抗比赛上,有同学的提交代码如下: publicasfiasfgwef12(){inttsadflas=3;intmasf11233=2;int[]wasdf1213=newint[10+1];int[]vasf124l=newint[10+I];int[][]ddasf1234p=newint[masf11233...你肯定很奇怪,这看上去代码似乎不像是正
- 2024 睿抗机器人开发者大赛CAIP-编程技能赛-本科组(省赛)
shiyep
算法数据结构
RC-u1热҈热҈热҈分数10作者DAI,Longao单位杭州百腾教育科技有限公司热҈热҈热҈……最近热得打的字都出汗了!幸好某连锁餐厅开启了气温大于等于35度即可获得一杯免费雪碧的活动。但不知为何,在每个星期四的时候,这个活动会暂停一天……现在给定连续的若干天的气温情况以及给定的第一天是星期几,请你算出有多少天你可以喝到免费的雪碧,又有多少天是因为星期四而导致你喝不到雪碧的。输入格式:输入第一行
- 【Linux操作系统】安装VS Code
LN花开富贵
Linuxlinux单片机物联网嵌入式硬件学习
更新系统包列表sudoaptupdate安装依赖项sudoaptinstallsoftware-properties-commonapt-transport-httpswget添加微软GPG密钥和仓库源wget-qhttps://packages.microsoft.com/keys/microsoft.asc-O-|sudoapt-keyadd-sudoadd-apt-repository"de
- 2025年睿抗机器人开发者大赛CAIP-编程技能赛(省赛)-RoboCom 世界机器人开发者大赛-本科组
小竹子14
算法c++数据结构
RC-u1早鸟价代码#include"bits/stdc++.h"usingnamespacestd;intmain(){intn;cin>>n;intm,d,q;while(n--){cin>>m>>d>>q;if(m>7||m==7&&d>11){cout>T;intn,s;intcnt=0;intp,f;intsumm=0;while(T--){cin>>n>>s;intm=n;cnt=0;
- Vue3递归组件详解:构建动态树形结构的终极方案
编程随想▿
Vue3vue.js前端javascript前端框架
目录一、什么是递归组件?二、Vue3递归组件实现步骤1.基础实现2.关键点解析三、动态数据实战:渲染树形菜单四、Vue3递归组件的核心注意事项五、高级技巧:异步递归组件六、常见问题排查结语一、什么是递归组件?递归组件是指在组件内部调用自身的特殊组件。它适用于处理嵌套树形数据结构的场景,例如:文件目录系统多级导航菜单组织架构图嵌套评论列表在Vue3中,递归组件通过name属性标识自身,实现模板自引用
- Spring的注解积累
yijiesuifeng
spring注解
用注解来向Spring容器注册Bean。
需要在applicationContext.xml中注册:
<context:component-scan base-package=”pagkage1[,pagkage2,…,pagkageN]”/>。
如:在base-package指明一个包
<context:component-sc
- 传感器
百合不是茶
android传感器
android传感器的作用主要就是来获取数据,根据得到的数据来触发某种事件
下面就以重力传感器为例;
1,在onCreate中获得传感器服务
private SensorManager sm;// 获得系统的服务
private Sensor sensor;// 创建传感器实例
@Override
protected void
- [光磁与探测]金吕玉衣的意义
comsci
这是一个古代人的秘密:现在告诉大家
信不信由你们:
穿上金律玉衣的人,如果处于灵魂出窍的状态,可以飞到宇宙中去看星星
这就是为什么古代
- 精简的反序打印某个数
沐刃青蛟
打印
以前看到一些让求反序打印某个数的程序。
比如:输入123,输出321。
记得以前是告诉你是几位数的,当时就抓耳挠腮,完全没有思路。
似乎最后是用到%和/方法解决的。
而今突然想到一个简短的方法,就可以实现任意位数的反序打印(但是如果是首位数或者尾位数为0时就没有打印出来了)
代码如下:
long num, num1=0;
- PHP:6种方法获取文件的扩展名
IT独行者
PHP扩展名
PHP:6种方法获取文件的扩展名
1、字符串查找和截取的方法
1
$extension
=
substr
(
strrchr
(
$file
,
'.'
), 1);
2、字符串查找和截取的方法二
1
$extension
=
substr
- 面试111
文强chu
面试
1事务隔离级别有那些 ,事务特性是什么(问到一次)
2 spring aop 如何管理事务的,如何实现的。动态代理如何实现,jdk怎么实现动态代理的,ioc是怎么实现的,spring是单例还是多例,有那些初始化bean的方式,各有什么区别(经常问)
3 struts默认提供了那些拦截器 (一次)
4 过滤器和拦截器的区别 (频率也挺高)
5 final,finally final
- XML的四种解析方式
小桔子
domjdomdom4jsax
在平时工作中,难免会遇到把 XML 作为数据存储格式。面对目前种类繁多的解决方案,哪个最适合我们呢?在这篇文章中,我对这四种主流方案做一个不完全评测,仅仅针对遍历 XML 这块来测试,因为遍历 XML 是工作中使用最多的(至少我认为)。 预 备 测试环境: AMD 毒龙1.4G OC 1.5G、256M DDR333、Windows2000 Server
- wordpress中常见的操作
aichenglong
中文注册wordpress移除菜单
1 wordpress中使用中文名注册解决办法
1)使用插件
2)修改wp源代码
进入到wp-include/formatting.php文件中找到
function sanitize_user( $username, $strict = false
- 小飞飞学管理-1
alafqq
管理
项目管理的下午题,其实就在提出问题(挑刺),分析问题,解决问题。
今天我随意看下10年上半年的第一题。主要就是项目经理的提拨和培养。
结合我自己经历写下心得
对于公司选拔和培养项目经理的制度有什么毛病呢?
1,公司考察,选拔项目经理,只关注技术能力,而很少或没有关注管理方面的经验,能力。
2,公司对项目经理缺乏必要的项目管理知识和技能方面的培训。
3,公司对项目经理的工作缺乏进行指
- IO输入输出部分探讨
百合不是茶
IO
//文件处理 在处理文件输入输出时要引入java.IO这个包;
/*
1,运用File类对文件目录和属性进行操作
2,理解流,理解输入输出流的概念
3,使用字节/符流对文件进行读/写操作
4,了解标准的I/O
5,了解对象序列化
*/
//1,运用File类对文件目录和属性进行操作
//在工程中线创建一个text.txt
- getElementById的用法
bijian1013
element
getElementById是通过Id来设置/返回HTML标签的属性及调用其事件与方法。用这个方法基本上可以控制页面所有标签,条件很简单,就是给每个标签分配一个ID号。
返回具有指定ID属性值的第一个对象的一个引用。
语法:
&n
- 励志经典语录
bijian1013
励志人生
经典语录1:
哈佛有一个著名的理论:人的差别在于业余时间,而一个人的命运决定于晚上8点到10点之间。每晚抽出2个小时的时间用来阅读、进修、思考或参加有意的演讲、讨论,你会发现,你的人生正在发生改变,坚持数年之后,成功会向你招手。不要每天抱着QQ/MSN/游戏/电影/肥皂剧……奋斗到12点都舍不得休息,看就看一些励志的影视或者文章,不要当作消遣;学会思考人生,学会感悟人生
- [MongoDB学习笔记三]MongoDB分片
bit1129
mongodb
MongoDB的副本集(Replica Set)一方面解决了数据的备份和数据的可靠性问题,另一方面也提升了数据的读写性能。MongoDB分片(Sharding)则解决了数据的扩容问题,MongoDB作为云计算时代的分布式数据库,大容量数据存储,高效并发的数据存取,自动容错等是MongoDB的关键指标。
本篇介绍MongoDB的切片(Sharding)
1.何时需要分片
&nbs
- 【Spark八十三】BlockManager在Spark中的使用场景
bit1129
manager
1. Broadcast变量的存储,在HttpBroadcast类中可以知道
2. RDD通过CacheManager存储RDD中的数据,CacheManager也是通过BlockManager进行存储的
3. ShuffleMapTask得到的结果数据,是通过FileShuffleBlockManager进行管理的,而FileShuffleBlockManager最终也是使用BlockMan
- yum方式部署zabbix
ronin47
yum方式部署zabbix
安装网络yum库#rpm -ivh http://repo.zabbix.com/zabbix/2.4/rhel/6/x86_64/zabbix-release-2.4-1.el6.noarch.rpm 通过yum装mysql和zabbix调用的插件还有agent代理#yum install zabbix-server-mysql zabbix-web-mysql mysql-
- Hibernate4和MySQL5.5自动创建表失败问题解决方法
byalias
J2EEHibernate4
今天初学Hibernate4,了解了使用Hibernate的过程。大体分为4个步骤:
①创建hibernate.cfg.xml文件
②创建持久化对象
③创建*.hbm.xml映射文件
④编写hibernate相应代码
在第四步中,进行了单元测试,测试预期结果是hibernate自动帮助在数据库中创建数据表,结果JUnit单元测试没有问题,在控制台打印了创建数据表的SQL语句,但在数据库中
- Netty源码学习-FrameDecoder
bylijinnan
javanetty
Netty 3.x的user guide里FrameDecoder的例子,有几个疑问:
1.文档说:FrameDecoder calls decode method with an internally maintained cumulative buffer whenever new data is received.
为什么每次有新数据到达时,都会调用decode方法?
2.Dec
- SQL行列转换方法
chicony
行列转换
create table tb(终端名称 varchar(10) , CEI分值 varchar(10) , 终端数量 int)
insert into tb values('三星' , '0-5' , 74)
insert into tb values('三星' , '10-15' , 83)
insert into tb values('苹果' , '0-5' , 93)
- 中文编码测试
ctrain
编码
循环打印转换编码
String[] codes = {
"iso-8859-1",
"utf-8",
"gbk",
"unicode"
};
for (int i = 0; i < codes.length; i++) {
for (int j
- hive 客户端查询报堆内存溢出解决方法
daizj
hive堆内存溢出
hive> select * from t_test where ds=20150323 limit 2;
OK
Exception in thread "main" java.lang.OutOfMemoryError: Java heap space
问题原因: hive堆内存默认为256M
这个问题的解决方法为:
修改/us
- 人有多大懒,才有多大闲 (评论『卓有成效的程序员』)
dcj3sjt126com
程序员
卓有成效的程序员给我的震撼很大,程序员作为特殊的群体,有的人可以这么懒, 懒到事情都交给机器去做 ,而有的人又可以那么勤奋,每天都孜孜不倦得做着重复单调的工作。
在看这本书之前,我属于勤奋的人,而看完这本书以后,我要努力变成懒惰的人。
不要在去庞大的开始菜单里面一项一项搜索自己的应用程序,也不要在自己的桌面上放置眼花缭乱的快捷图标
- Eclipse简单有用的配置
dcj3sjt126com
eclipse
1、显示行号 Window -- Prefences -- General -- Editors -- Text Editors -- show line numbers
2、代码提示字符 Window ->Perferences,并依次展开 Java -> Editor -> Content Assist,最下面一栏 auto-Activation
- 在tomcat上面安装solr4.8.0全过程
eksliang
Solrsolr4.0后的版本安装solr4.8.0安装
转载请出自出处:
http://eksliang.iteye.com/blog/2096478
首先solr是一个基于java的web的应用,所以安装solr之前必须先安装JDK和tomcat,我这里就先省略安装tomcat和jdk了
第一步:当然是下载去官网上下载最新的solr版本,下载地址
- Android APP通用型拒绝服务、漏洞分析报告
gg163
漏洞androidAPP分析
点评:记得曾经有段时间很多SRC平台被刷了大量APP本地拒绝服务漏洞,移动安全团队爱内测(ineice.com)发现了一个安卓客户端的通用型拒绝服务漏洞,来看看他们的详细分析吧。
0xr0ot和Xbalien交流所有可能导致应用拒绝服务的异常类型时,发现了一处通用的本地拒绝服务漏洞。该通用型本地拒绝服务可以造成大面积的app拒绝服务。
针对序列化对象而出现的拒绝服务主要
- HoverTree项目已经实现分层
hvt
编程.netWebC#ASP.ENT
HoverTree项目已经初步实现分层,源代码已经上传到 http://hovertree.codeplex.com请到SOURCE CODE查看。在本地用SQL Server 2008 数据库测试成功。数据库和表请参考:http://keleyi.com/a/bjae/ue6stb42.htmHoverTree是一个ASP.NET 开源项目,希望对你学习ASP.NET或者C#语言有帮助,如果你对
- Google Maps API v3: Remove Markers 移除标记
天梯梦
google maps api
Simply do the following:
I. Declare a global variable:
var markersArray = [];
II. Define a function:
function clearOverlays() {
for (var i = 0; i < markersArray.length; i++ )
- jQuery选择器总结
lq38366
jquery选择器
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
- 基础数据结构和算法六:Quick sort
sunwinner
AlgorithmQuicksort
Quick sort is probably used more widely than any other. It is popular because it is not difficult to implement, works well for a variety of different kinds of input data, and is substantially faster t
- 如何让Flash不遮挡HTML div元素的技巧_HTML/Xhtml_网页制作
刘星宇
htmlWeb
今天在写一个flash广告代码的时候,因为flash自带的链接,容易被当成弹出广告,所以做了一个div层放到flash上面,这样链接都是a触发的不会被拦截,但发现flash一直处于div层上面,原来flash需要加个参数才可以。
让flash置于DIV层之下的方法,让flash不挡住飘浮层或下拉菜单,让Flash不档住浮动对象或层的关键参数:wmode=opaque。
方法如下:
- Mybatis实用Mapper SQL汇总示例
wdmcygah
sqlmysqlmybatis实用
Mybatis作为一个非常好用的持久层框架,相关资料真的是少得可怜,所幸的是官方文档还算详细。本博文主要列举一些个人感觉比较常用的场景及相应的Mapper SQL写法,希望能够对大家有所帮助。
不少持久层框架对动态SQL的支持不足,在SQL需要动态拼接时非常苦恼,而Mybatis很好地解决了这个问题,算是框架的一大亮点。对于常见的场景,例如:批量插入/更新/删除,模糊查询,多条件查询,联表查询,

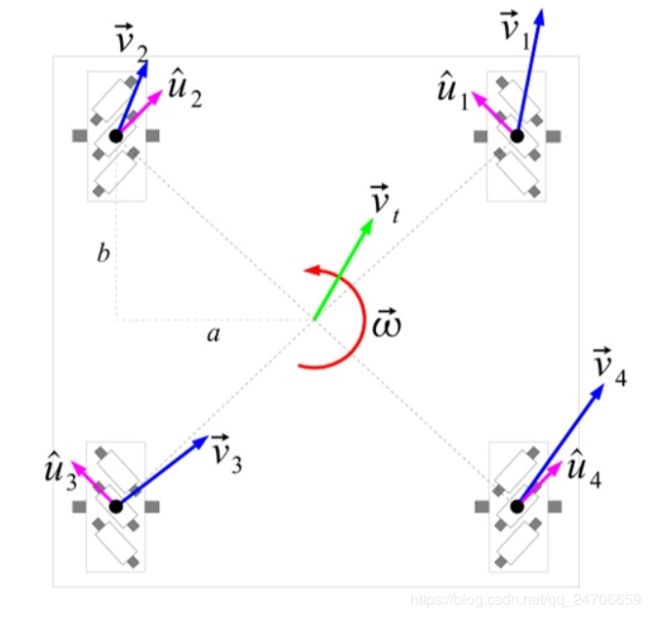
 ,
, 时间内轮子编码器增加的读数,ppr是编码器的线数,r是轮子半径。式中的分子 实际上是在算
时间内轮子编码器增加的读数,ppr是编码器的线数,r是轮子半径。式中的分子 实际上是在算