图像修复:Object Removal by Exemplar-Based Inpainting 学习笔记
Overview
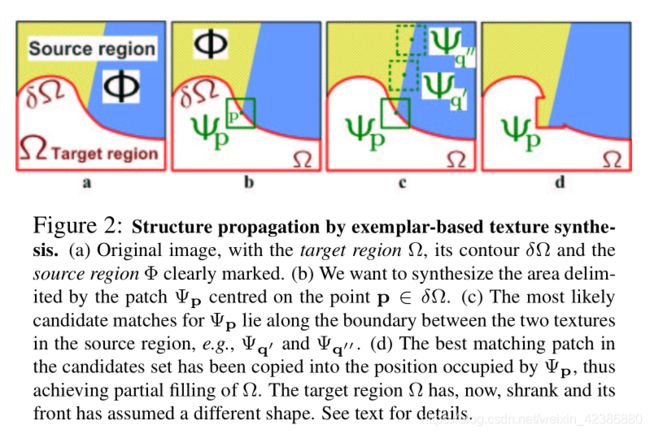
这是一篇比较经典的exemplar-based的inpainting算法,算法思路比较简单,是一种贪心算法,主要分为以下几步:
1、在需要填充区域的轮廓上计算权重,选择权重最大的轮廓点作为待填充点
2、在该点周围领域取一个一定大小的patch块,在图像其他区域内找该patch快的最近邻patch
3、将最近邻patch块对应到需要填充区域的部分复制到等待填充的区域,再重复上述步骤,直至所有点都填充完毕。
从上述算法流程来看,算法比较简单,是一个基于填充区域轮廓优先级的算法,算法是一个贪心算法。存在的一个明显弊端就是无法保证最终整体填充效果。
Impletion Detail
1. filling order
paper中着重讲述了填充顺序的关键性,也是本片paper的主要创新点,轮廓点上的优先级由两部分组成,其中C(p)是confidence term, D§是data term.
P ( p ) = C ( p ) D ( p ) P(p) = C(p)D(p) P(p)=C(p)D(p)
1、confidence term: 表明该点的可靠度
2、data term: 根据patch周围数据进行计算的项
1.1 confidence term
condidence 项可视为围绕在点 p p p周围点的可信度,目的是优先填充那些周围有更多已知点的patch快。
其计算公式如下, Ψ p \Psi_p Ψp表示以 p p p点为中心的patch快,其中 ∣ Ψ p ∣ |\Psi_p| ∣Ψp∣ 是整个patch的面积,
C ( p ) = ∑ q ∈ Ψ p C ( q ) ∣ Ψ p ∣ C(p) = \frac{\sum_{q \in \Psi_p}C(q)}{|\Psi_p|} C(p)=∣Ψp∣∑q∈ΨpC(q)
1.2 data term
数据项的目的是优先填充有较强纹路结构的点,其计算方式如下
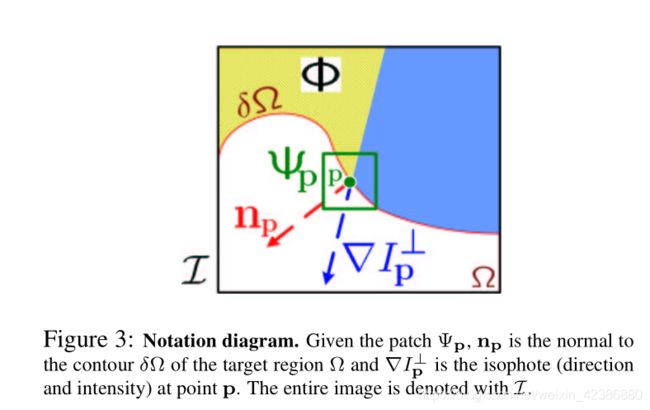
D ( p ) = ∣ ▽ I p ⊥ ⋅ n p ∣ α D(p) = \frac{|\triangledown I^{\bot}_p \cdot n_p|}{\alpha} D(p)=α∣▽Ip⊥⋅np∣
其意义如下图,在点 p p p处获得待填充轮廓的法线方向 n p n_p np, ▽ I p ⊥ \triangledown I^{\bot}_p ▽Ip⊥ 则表示其梯度方向旋转90度,从而可以找到具有比较强结构特征的点。从该项可以看出那些梯度方向和轮廓垂直,且梯度比较大的点,拥有更高的优先级。
propagate texture and structure information
在找到优先级最高的点后,以 p p p为中心的patch块 Ψ p \Psi_p Ψp, 在已知图像区域中寻找一个相似的最高的patch块 Ψ q ^ \Psi_{\hat{q}} Ψq^。
Updating confidence values
使用 Ψ q ^ \Psi_{\hat{q}} Ψq^ 填充 Ψ p ^ \Psi_{\hat{p}} Ψp^后,confidence的值也需要进行更新,对于新填充的点,统一使用点 p ^ \hat{p} p^处的confidence值进行填充。
C ( q ) = C ( p ^ ) , C(q) = C(\hat{p}), C(q)=C(p^),
更新confidence从而可以动态的评估边界上各个patch块的相对优先级,而不需要和图像相关的参数。随着填充的进行,confidence值会不断减少,表明我们对于目标中心区域的像素点更不确定。
review of the algorithm
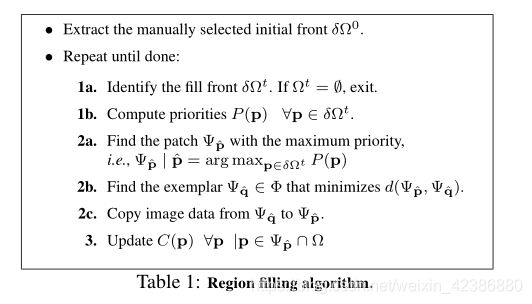
下表为整个算法的流程,正如先前所说,该算法是一个贪心算法,每次寻找边界上的一个最优点进行patch块的生长,直到所有点都被填充。
缺点
- 基于样例算法的共有缺陷:无法应对没有合适填充样例的图片
- 无法保证最终填充图像整体的consistence.
some improvement method
filling order
填充次序对于该算法来说至关重要,是该算法能work的重要条件.也有一些对于填充顺序进行改良的算法,如下一个是基于样例稀疏性的。
本算法中data term 是利用轮廓的法线方向和梯度垂直向量的点积作为其数据项,[1]的算法则使用了patch块的稀疏性作为度量,提出优先填充稀疏性更高的patch块,从而改善一些情况下填充的效果。
Result
其算法实际运行图例如下面gif所示,对于需要填充的建筑物,沿着其轮廓线寻找优先级高的点,依次不断填充,最终获得了不错的一个效果。
对于图像中有较多可以copy的patch块的场景,修复效果都还不错,但是无法保证最终整体填充效果,容易出现到最后怎么找patch块都会出现不连续的问题,所以后来大牛们又提出了很多基于全局优化的inpainting/Image completion算法。