范数的简单总结
引入:
函数与几何图形往往是有对应的关系,这个很好想象,特别是在三维以下的空间内,函数是几何图像的数学概括,而几何图像是函数的高度形象化,比如一个函数对应几何空间上若干点组成的图形。
但当函数与几何超出三维空间时,就难以获得较好的想象,于是就有了映射的概念,映射表达的就是一个集合通过某种关系转为另外一个集合。通常数学书是先说映射,然后再讨论函数,这是因为函数是映射的一个特例。
为了更好的在数学上表达这种映射关系,(这里特指线性关系)于是就引进了矩阵。这里的矩阵就是表征上述空间映射的线性关系。而通过向量来表示上述映射中所说的这个集合,而我们通常所说的基,就是这个集合的最一般关系。于是,我们可以这样理解,一个集合(向量),通过一种映射关系(矩阵),得到另外一个集合(另外一个向量)。
那么向量的范数,就是表示这个原有集合的大小。
而矩阵的范数,就是表示这个变化过程的大小的一个度量。何为范数?
我们知道距离的定义是一个宽泛的概念,只要满足非负、自反、三角不等式就可以称之为距离。范数是一种强化了的距离概念,它在定义上比距离多了一条数乘的运算法则。有时候为了便于理解,我们可以把范数当作距离来理解。
在数学上,范数包括向量范数和矩阵范数,向量范数表征向量空间中向量的大小,矩阵范数表征矩阵引起变化的大小。一种非严密的解释就是,对应向量范数,向量空间中的向量都是有大小的,这个大小如何度量,就是用范数来度量的,不同的范数都可以来度量这个大小,就好比米和尺都可以来度量远近一样;对于矩阵范数,学过线性代数,我们知道,通过运算AX=B,可以将向量X变化为B,矩阵范数就是来度量这个变化大小的。
一.几种向量范数的定义和含义 :
1、 L-P范数 :
与闵可夫斯基距离的定义一样,L-P范数不是一个范数,而是一组范数,其定义如下:
表示向量元素绝对值的p次方和的1/p次幂,matlab调用函数norm(x, p)。
根据P 的变化,范数也有着不同的变化,一个经典的有关P范数的变化图如下:
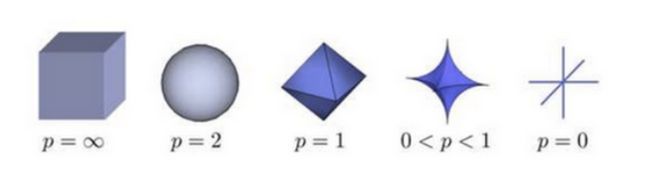
上图表示了p从无穷到0变化时,三维空间中到原点的距离(范数)为1的点构成的图形的变化情况。以常见的L-2范数(p=2)为例,此时的范数也即欧氏距离,空间中到原点的欧氏距离为1的点构成了一个球面。
实际上,在0时,Lp并不满足三角不等式的性质,也就不是严格意义下的范数。以p=0.5,二维坐标(1,4)、(4,1)、(1,9)为例:
![]()
因此这里的L-P范数只是一个概念上的宽泛说法。
2、 L0范数 :
当P=0时,也就是L0范数,由上面可知,L0范数并不是一个真正的范数,它主要被用来度量向量中非零元素的个数。用上面的L-P定义可以得到的L-0的定义为:
这里就有点问题了,我们知道非零元素的零次方为1,但零的零次方,非零数开零次方都是什么鬼,很不好说明L0的意义,所以在通常情况下,大家都用的是:
![]()
表示向量x中非零元素的个数。
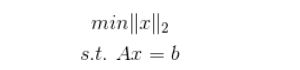
对于L0范数,其优化问题为:

在实际应用中,由于L0范数本身不容易有一个好的数学表示形式,给出上面问题的形式化表示是一个很难的问题,故被人认为是一个NP-hard问题。所以在实际情况中,L0的最优问题会被放宽到L1或L2下的最优化。
3、 L1范数 :
L1范数是我们经常见到的一种范数,它的定义如下:

表示向量x中非零元素的绝对值之和,matlab调用函数norm(x, 1) 。
L1范数有很多的名字,例如我们熟悉的曼哈顿距离、最小绝对误差等。使用L1范数可以度量两个向量间的差异,如绝对误差和(Sum of Absolute Difference):

对于L1范数,它的优化问题如下:

由于L1范数的天然性质,如果把L1范数作为目标函数进行优化,对L1优化的解是一个稀疏解,因此L1范数也被叫做稀疏规则算子。通过L1可以实现特征的稀疏,去掉一些没有信息的特征,例如在对用户的电影爱好做分类的时候,用户有100个特征,可能只有十几个特征是对分类有用的,大部分特征如身高体重等可能都是无用的,利用L1范数就可以过滤掉。
4、 L2范数 :
L2范数是我们最常见最常用的范数了,我们用的最多的度量距离欧氏距离就是一种L2范数,它的定义如下:
表示向量元素的平方和再开平方,matlab调用函数norm(x, 2)。
像L1范数一样,L2也可以度量两个向量间的差异,如平方差和(Sum of Squared Difference)/最小均方误差:

对于L2范数,它的优化问题如下:
L2范数通常会被用来做优化目标函数的正则化项,防止模型为了迎合训练集而过于复杂造成过拟合的情况,从而提高模型的泛化能力。
5、 L∞范数 :
当p = ∞时,也就是 L∞范数,它主要被用来度量向量元素的最大值,matlab调用函数norm(x, inf)。
与L0一样,通常情况下表示为 :
![]()
L∞范数又被称为 H∞,在鲁棒控制、滤波中作为一项优化指标。
最通俗的向量范数记法:
L0范数:向量中非零元素的个数。
L1范数:为绝对值之和。
L2范数:就是通常意义上的模。
L∞范数:就是取向量的最大值。
在机器学习中的应用
正则化在机器学习中经常出现,但是我们常常知其然不知其所以然,今天博主将从正则化对模型的限制、正则化与贝叶斯先验的关系和结构风险最小化三个角度出发,谈谈L1、L2范数被使用作正则化项的原因。博主是初学者,理解有限,若有理解错误的地方还望大家批评指正。
应用一:约束模型的特性:
1.1 L2正则化——让模型变得简单:
例如我们给下图的点建立一个模型:
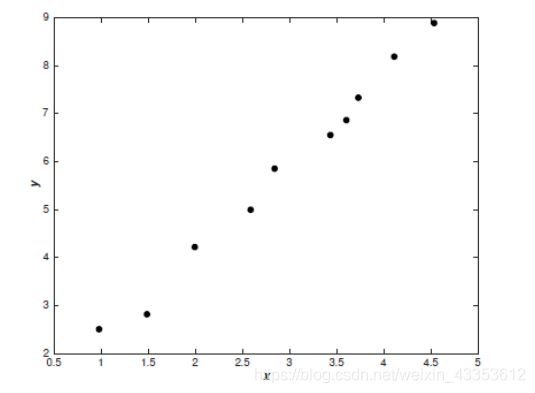
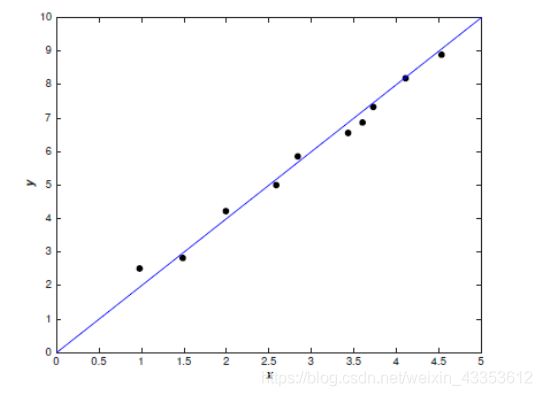
我们可以直接建立线性模型:
也可以建立一个多项式模型:
![]()
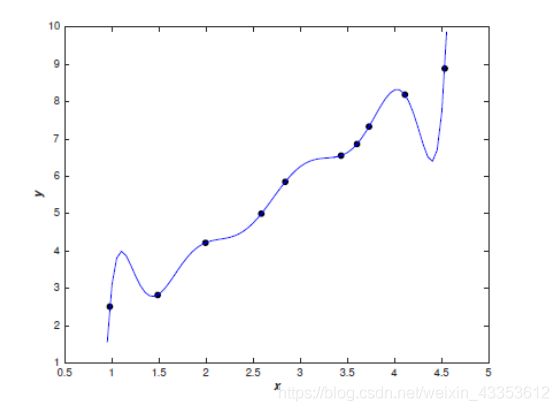
哪种模型更好呢?直观来讲,我们应该会选择线性模型。Occam’s razor定律告诉我们,‘Entities should not be multiplied unnecessarily’。这可以理解为简单的模型肯定比复杂的模型常见,如果一个简单的模型刚好适合拟合这些数据,那么我们会认为这个简单的模型恰好反应出一些潜在的规律。从这个角度来看,尽管多项式模型在已知的数据点上能近似地很好,但这是学习到了数据噪声的结果,在未知的数据的泛化上很有可能存在问题。
奥卡姆剃刀定律(Occam’s Razor, Ockham’s Razor)又称“奥康的剃刀”。
奥卡姆剃刀定律,是由14世纪逻辑学家、圣方济各会修士奥卡姆的威廉(William of Occam,约1285年至1349年)提出。奥卡姆(Ockham)在英格兰的萨里郡,那是他出生的地方。他在《箴言书注》2卷15题说“切勿浪费较多东西去做用较少的东西同样可以做好的事情。”这个原理称为“如无必要,勿增实体”(Entities should not be multiplied unnecessarily)。
这就是我们常说的模型训练中的过拟合现象,即训练集误差在下降,测试集误差在上升。我们认为这是模型学习到了训练集中局部噪声的结果,它虽然在训练集上表现得好,泛化能力却比较差。因此我们需要更简单的模型,这个模型不会受到单个证据的影响,不会因为某个输入的微小变动而产生较大的行为改变。
L2正则化可以解决模型训练中的过拟合现象,它也被称为权重衰减。在回归模型中,这也被称为岭回归。我们先介绍L2正则化的实现方式,然后定性地介绍一下为什么L2正则化可以防止过拟合。
设损失函数为:

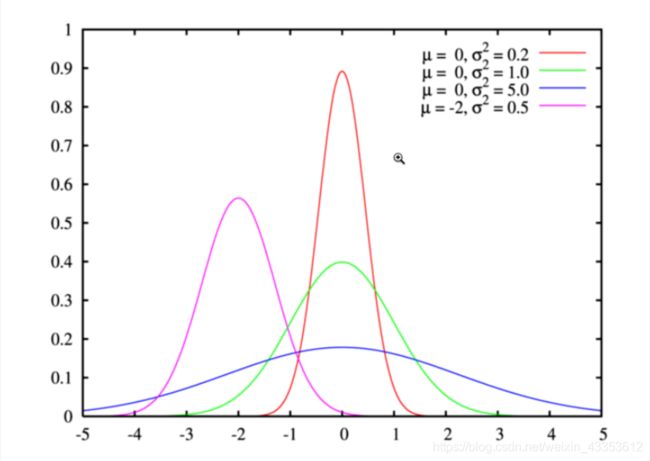
其中 l0 表示没有正则化时的损失函数。对它求w的偏导:

对w进行更新:

我们知道,没有正则化的参数更新为:
而L2正则化使用了一个乘性因子 (1- ηλ ) 去调整权重,因此权重会不断衰减,并且在权重较大时衰减地快,权重较小时衰减得慢。
下面换一种方式来理解L2正则化对权重的限制。我们的目标是最小化下面的损失函数:

为了 l0 最小,需要让 l0 和正则化项的和能够最小。若w变大让 l0 减小, ∑ w ( w 2 ) \sum_{w}(w^2) w∑(w2)也会变大,后者就会抑制前者,从而让w不会上升地过大。此时 λ 就像是一个调整模型拟合精度与泛化能力的权重因子。
现在我们知道了,L2正则化能够限制参数的大小。那么,为什么参数大小被限制了,这个模型就是一个简单的模型,就能够防止过拟合了呢?回到我们最初开始介绍的多项式回归 y = a0x9 + a1x8 + … + a9,当参数很小时,高次方项的影响就会变得十分微弱,这使模型不会对某一个输入太过敏感,从而近似学习到一条简单的曲线,类似最开始的线性模型。也就是说,即使你预设的回归模型是一个9次的多项式回归,通过正则化学习,高次项前的系数 会变得很小,最后的曲线类似一条直线,这就是让模型变成了一个简单的模型。
总结一下:
- 正则化让模型根据训练数据中常见的模式来学习相对简单的模型,无正则化的模型用大参数学习大噪声。
- L2正则化通过权重衰减,保证了模型的简单,提高了泛化能力。
1.2 L0、L1正则化——让模型变得稀疏:
我们知道,如果模型中的特征之间有相互关系,会增加模型的复杂程度,并且对整个模型的解释能力并没有提高,这时我们就要进行特征选择。特征选择也会让模型变得容易解释,假设我们要分析究竟是哪些原因触发了事件A,但是现在有1000个可能的影响因子,无从分析。如果通过训练让一部分因子为0,只剩下了几个因子,那么这几个因子就是触发事件A的关键原因。进行特征自动选择,也就是让模型变得稀疏,这可以通过L0和L1范数实现。
L0正则化
L0范数指的是向量中非零元素的个数,L0正则化就是限制非零元素的个数在一定的范围,这很明显会带来稀疏。一般而言,用L0范数实现稀疏是一个NP-hard问题,因此人们一般使用L1正则化来对模型进行稀疏约束。
L1正则化
设损失函数为:

其中 l0 表示没有正则化时的损失函数。对它求w的偏导:

sgn(w)表示w的符号。对w进行更新:

可以看出,L1正则化是通过加上或减去一个常量 ηλ ,让w向0靠近;对比L2正则化,它使用了一个乘性因子 (1 - ηλ )去调整权重,使权重不断衰减。因此可以得出:当 |w| 很大时,L2对权重的衰减速度比L1大得多,当 |w| 很小时,L1对权重的缩小比L2快得多。
这也就解释了为什么L1正则能让模型变得稀疏。L1对于小权重减小地很快,对大权重减小较慢,因此最终模型的权重主要集中在那些高重要度的特征上,对于不重要的特征,权重会很快趋近于0。所以最终权重w会变得稀疏。
1.3 L1、L2正则化的形象理解:
理解一:解的表示
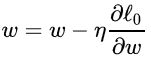
L1、L2正则化还有另一种表示方式:
L1:
![]()
L2:

如上图所示,假设w是一个二维的向量,则目标函数可以用一圈圈等值线表示,约束条件用图中黑线表示,而我们要找的最优解,就在等值线和约束线第一次相交的地方。
左图是L1正则化的情况,在特征为二维时,约束线是一个菱形,等值线极有可能最先与顶点相交,在这种情况下有一个维度的特征就会为0,这就带来了稀疏。当特征的维度变高,坐标轴上角与边都会变多,这更会加大等值线与他们先相交的概率,从而导致了稀疏性。
L2正则化不同,如右图所示,它的约束线是一个圆形,等值线可能与它任意一个位置的点首先相切,这个切点在坐标轴上的概率大大 减小,从而不太容易导致稀疏。
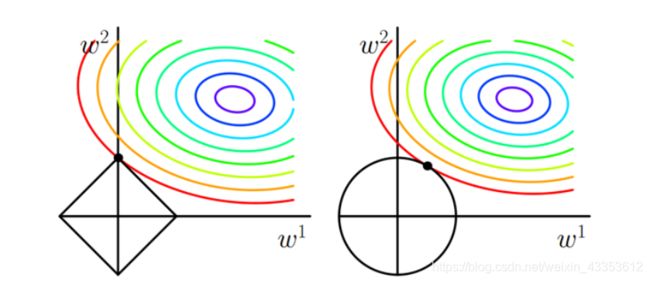
理解二:下降速度
另外从下降速度来看,L1正则化是绝对值函数,L2正则化是二次函数,他们的函数图形如上图所示。可以看出L1正则化的下降速度一直都是一致的,这也符合之间得出的结论:L1正则化通过一个常数:
![]()
来让权重减小:

而L2正则化的下降速度不同,当w大的时候,下降较快,当w小的时候,下降较慢,这也符合我们之前推导的,L2正则化通过一个乘性因子
![]()
去衰减权重:

这种差异就导致当w较大时,L2的斜率大于L1,L2正则化权重衰减地比L1正则化快;w小时,L2斜率小于L1,L1正则化权重衰减地比L2正则化快。因此L1正则化最终会导致模型保留了重要的大权重连接,不重要的小权重都被衰减为0,产生了稀疏。而L2正则化可以通过限制权重大小让模型变得简单,但却不会导致稀疏。
应用二:贝叶斯学派中,对应于模型的先验概率
频率学派和贝叶斯学派
频率学派往往通过证据推导一件事情发生的概率,而贝叶斯学派还会同时考虑这个证据的可信度。从参数估计的角度来讲,频率学派认为参数 θ 是固定不变的,虽然我们不知道它,但是我们可以根据一组抽样值去预测它的结果,这就有了极大似然估计(Maximum Likelihood Estimation, MLE)。极大似然估计的思想就是,我已经抽样产生了一组值(例如抛硬币5次,得出结果:正正反正反),那么到底是什么参数(抛一次硬币,正面朝上的概率)才让我最有可能抽样出这一组结果呢。即我的目标是求出让似然函数最大的参数 θ :

而贝叶斯学派则认为参数 θ 本身就是一个随机变量,它也有自己的分布。如果我们现在已经有一组结果(正正反正反),我们可以根据这个结果求出随机变量 θ 最有可能的值,这其实就是最大后验概率估计(MAP)。最大后验概率估计是要求出 P( θ | X ) 最大的 θ ,我们知道:

P(X)作为确定值,我们不考虑它,最大后验概率估计变成了:

可以看出它只是在极大似然估计的基础上乘上了参数的先验概率,也就是说我求出的参数不仅仅有最大的概率产生这组值(正正反正反),它本身出现的概率也必须大。
举个通俗易懂的例子,如果你出门遇到一位算命师傅,他说你最近有桃花运,果然你不久之后就被心仪的人表白,这说明这个师傅算命很准(记作事件A),现在我们来讨论下这个师傅究竟会不会算命(将师傅会算命记作证据B)。从频率学派的角度来看,如果师傅会算命(证据B发生),那么他算对了我的桃花运是一件概率很大的事情。也就是说P(A|B)很大,从极大似然的角度讲,我们应该相信师傅会算命。可事实上我们根本不会相信师傅会算命,因为我们本身对会算命这件事有着先验的不相信,也就是说在我们眼中,P(B)是很小的。这说明我们已经潜移默化地用了贝叶斯思想,在最大后验概率估计中,P(B|A) ~ P(A|B)P(B),即使P(A|B)很大,如果P(B)很小,那么P(B|A)还是会小。
先验概率与L1、L2范数
当模型的目标函数是最大化后验概率 P( w| X) ,即最大化:

连乘导致下溢,我们取负对数将其转化为最小化损失函数:

下面我们将证明参数的先验概率如何变成了损失函数的正则化项。
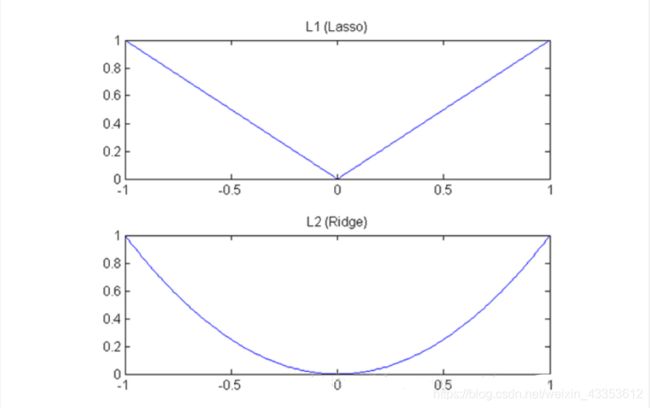
- (1)假设 w 的先验分布是高斯分布 w ~ N( 0, σ2 ),则:

其中m表示w的向量维度。最终目标函数为最小化:
 其中:
其中:

最终先验概率转变成了L2正则化项。
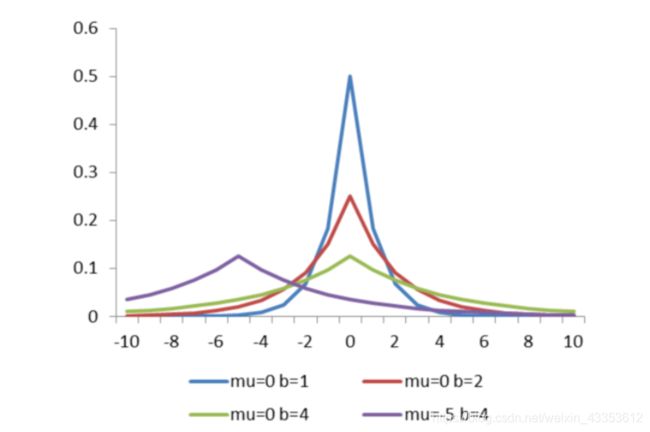
- (2) 假设w的先验分布时拉普拉斯分布,则:

其中m表示w的向量维度。最终目标函数为最小化:

其中 λ = 1/b,最终先验概率转变成了L1正则化项。
总结一下:
- 概率目标函数通过负对数转化,将正态分布和拉普拉斯分布的指数项转变成了普通的一次、二次项;
- 先验分布为高斯分布,对于损失函数的L2正则化项,先验分布为拉普拉斯分布,对应损失函数的L1正则化项。
应用三:结构风险最小化
首先介绍一下什么是期望风险、经验风险和结构风险。在机器学习的目标中,理论上我们应该尽力让期望风险(期望损失,expected loss)最小化:

但实际上,联合分布P(X,Y)我们是不可能知道的,因此在实际训练中,我们常常最小化经验风险(经验损失, empirical loss):

期望风险是模型关于联合分布的期望损失,经验风险是模型关于训练样本集的平均损失,当N趋近于无穷时,经验风险趋近于期望风险,因此我们可以用经验风险最小化去近似期望风险最小化。
然而,我们的训练集样本数量N很有限,用经验风险估计近似期望风险往往不理想,容易产生“过拟合”的现象,因此需要使用结构风险来矫正经验风险。
结构风险(structural risk)最小化的目的是防止过拟合,它是在经验风险上加上表示模型复杂度的正则化项:

其中J(f)为模型的复杂度。结构风险最小化的目标就是让经验风险与模型复杂度同时小。监督学习的问题实际上也就是经验风险或结构风险最小化问题,对于样本容量大的情况,经验风险最小化可以达到很好的效果,例如极大似然估计;当样本容量不够时,需要使用结构风险最小化来避免过拟合,例如最大后验概率估计,其模型的复杂度由模型的先验概率表示。
以上三种应用的统一
- 结构风险其实是让经验风险与模型复杂度同时小,实际上也是在约束模型的特性。
- 正则化可以约束模型的特性。简单的模型还是稀疏的模型,实际上都来自与我们对这个模型的事先感知,从贝叶斯的角度来理解,也可以认为这是模型的先验。
- 而结构风险是在经验风险后面加上表示模型复杂度的正则化项,最大后验概率估计就是最小化的结构风险,它的模型复杂度由模型的先验概率表示。当模型的先验分布为高斯分布时,认为模型复杂度是平方复杂度;当模型的先验分布为拉普拉斯分布时,认为模型的复杂度是绝对值复杂度。
- 总的来说可以理解为:结构风险考虑了约束模型的特性,模型的特性是由模型的先验知识确定的,先验的不同导致了L1、L2正则化项的不同使用。
二.矩阵范数:
引入
共轭转置矩阵
A*指的是A的共轭转置矩阵,也有AH这个写法。如果A里面全是实数,那效果就与AT无二;如果A里面也有复数,则是先对A取共轭(各项实部不变,虚部取相反数),然后再转置,比如:
A = 1.0000 + 0.0000i 0.0000 - 2.0000i 3.0000 + 0.0000i 0.0000 - 4.0000i >> A' ans = 1.0000 + 0.0000i 3.0000 + 0.0000i 0.0000 + 2.0000i 0.0000 + 4.0000i在matlab中A’的意思就是求共轭转置矩阵。
特征值
矩阵A的特征值被定义为:A v ⃗ \vec{ v } v=λ v ⃗ \vec{ v } v
其中 v ⃗ \vec{ v } v 被称为“矩阵A的特征向量”,λ被称为“矩阵A的特征值”。
在matlab中求解矩阵A的特征值方法如下:A = 1 2 3 4 5 6 7 8 9 >> [V,D] = eig(A) V = -0.2320 -0.7858 0.4082 -0.5253 -0.0868 -0.8165 -0.8187 0.6123 0.4082 D = 16.1168 0 0 0 -1.1168 0 0 0 -0.0000矩阵V的每一列都是一个特征向量,D中对应列中的值即与该特征向量相匹配的特征值。以上例V、D第一列为例,此时特征值λ=16.1168,特征向量 v ⃗ \vec{ v } v =[−0.2320,−0.5253,−0.8187]T,用matlab作验证如下:
>> A = [1,2,3;4,5,6;7,8,9] A = 1 2 3 4 5 6 7 8 9 >> v = [-0.2320,-0.5253,-0.8187]' v = -0.2320 -0.5253 -0.8187 >> lambda = 16.1168 lambda = 16.1168 >> A * v ans = -3.7387 -8.4667 -13.1947 >> lambda * v ans = -3.7391 -8.4662 -13.1948可知满足 A v ⃗ \vec{ v } v=λ v ⃗ \vec{ v } v。
1、矩阵的1-范数(列模) :
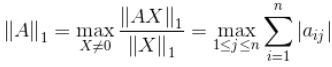
矩阵的每一列上的元素绝对值先求和,再从中取个最大的,(列和最大)。
A =
1 2 3
4 5 6
7 8 9
>> norm_1 = norm(A,1)
norm_1 =
18第一列求和结果为:|1|+|4|+|7|=12
第二列求和结果为:|2|+|5|+|8|=15
第三列求和结果为:|3|+|6|+|9|=18
里面最大的就是18,因此矩阵A的列和范数为18。
Matlab代码: norm(A,1);
2、矩阵的2-范数(谱模):

其中, λ 为 AA* 的特征值,矩阵的2-范数即对矩阵 AAT 的最大特征值开平方根。
>> [V,D] = eig(A'*A)
V =
-0.4082 -0.7767 0.4797
0.8165 -0.0757 0.5724
-0.4082 0.6253 0.6651
D =
0.0000 0 0
0 1.1414 0
0 0 283.8586
>> sqrt(283.8586)
ans =
16.8481(这里最大特征值为283.8586)
当然,matlab中也有更直接的计算矩阵2-范数的方法,如下:
>> norm_2 = norm(A,2)
norm_2 =
16.8481
两种方法计算出的结果是一样的。
Matlab代码:norm(A,2);
3、矩阵的无穷范数(行模):
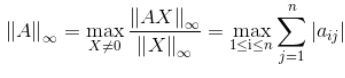
和1-范数(列和范数)类似,这里是沿行方向取绝对值求和,将最大的那个值作为矩阵的∞-范数。matlab代码如下:
>> A
A =
1 2 3
4 5 6
7 8 9
>> norm(A,inf)
ans =
24
第一行求和结果为:|1|+|2|+|3|=6
第二行求和结果为:|4|+|5|+|6|=15
第三行求和结果为:|7|+|8|+|9|=24
里面最大的就是24,因此矩阵A的行和范数为24。4、矩阵的核范数:
矩阵的核范数即:矩阵的奇异值(将矩阵svd分解)之和,这个范数可以用来低秩表示(因为最小化核范数,相当于最小化矩阵的秩——低秩)。
矩阵奇异值:
设A是一个mXn矩阵,称正半定矩阵A‘A的特征值的非负平方根为矩阵A的奇异值,其中A‘表示矩阵A的共扼转置矩阵.
奇异矩阵:
奇异矩阵是线性代数的概念,就是该矩阵的秩不是满秩。首先,看这个矩阵是不是方阵(即行数和列数相等的矩阵。若行数和列数不相等,那就谈不上奇异矩阵和非奇异矩阵)。然后,再看此矩阵的行列式|A|是否等于0,若等于0,称矩阵A为奇异矩阵;若不等于0,称矩阵A为非奇异矩阵。同时,由|A|≠0可知矩阵A可逆,这样可以得出另外一个重要结论:可逆矩阵就是非奇异矩阵,非奇异矩阵也是可逆矩阵。 如果A为奇异矩阵,则AX=0有无穷解,AX=b有无穷解或者无解。如果A为非奇异矩阵,则AX=0有且只有唯一零解,AX=b有唯一解。
SVD奇异值分解!!!详细见此!
例如矩阵A = [ -1 2 -3;
4 -6 6]
上述矩阵A最终结果就是:10.9287, MATLAB代码实现为:sum(svd(A)).
5、矩阵的F范数:
矩阵的F范数即:矩阵的各个元素平方之和再开平方根,它通常也叫做矩阵的L2范数,它的有点在它是一个凸函数,可以求导求解,易于计算。
例如矩阵A = [ -1 2 -3;
4 -6 6]
上述矩阵A最终结果就是:10.0995,MATLAB代码实现为:norm(A,‘fro’).
5、矩阵的L21范数:
矩阵的L21范数即:矩阵先以每一列为单位,求每一列的F范数(也可认为是向量的2范数),然后再将得到的结果求L1范数(也可认为是向量的1范数),很容易看出它是介于L1和L2之间的一种范数。
例如矩阵A = [ -1 2 -3;
4 -6 6]
上述矩阵A最终结果就是:17.1559,MATLAB代码实现为: norm(A(:,1),2) + norm(A(:,2),2) + norm(A(:,3),2).