运动规划之双向A*
原理
双向A*算法(bidirectional a star)是对A*的一种扩展,只是从起点和终点同时进行搜索而已;不过起点以终点为目标,终点以起点为目标,最后找到它们的交点。
例子
c_id_A = min( open_set_A, key=lambda o: self.find_total_cost(open_set_A, o, current_B))
current_A = open_set_A[c_id_A]
c_id_B = min(open_set_B, key=lambda o: self.find_total_cost(open_set_B, o, current_A))
current_B = open_set_B[c_id_B]
分别弹出到起点和到终点代价最小的结点!
"""
Bidirectional A* grid planning
author: Erwin Lejeune (@spida_rwin)
See Wikipedia article (https://en.wikipedia.org/wiki/Bidirectional_search)
"""
import math
import matplotlib.pyplot as plt
show_animation = True
class BidirectionalAStarPlanner:
def __init__(self, ox, oy, resolution, rr):
"""
Initialize grid map for a star planning
ox: x position list of Obstacles [m]
oy: y position list of Obstacles [m]
resolution: grid resolution [m]
rr: robot radius[m]
"""
self.min_x, self.min_y = None, None
self.max_x, self.max_y = None, None
self.x_width, self.y_width, self.obstacle_map = None, None, None
self.resolution = resolution
self.rr = rr
self.calc_obstacle_map(ox, oy)
self.motion = self.get_motion_model()
class Node:
def __init__(self, x, y, cost, parent_index):
self.x = x # index of grid
self.y = y # index of grid
self.cost = cost
self.parent_index = parent_index
def __str__(self):
return str(self.x) + "," + str(self.y) + "," + str(
self.cost) + "," + str(self.parent_index)
def planning(self, sx, sy, gx, gy):
"""
Bidirectional A star path search
input:
s_x: start x position [m]
s_y: start y position [m]
gx: goal x position [m]
gy: goal y position [m]
output:
rx: x position list of the final path
ry: y position list of the final path
"""
start_node = self.Node(self.calc_xy_index(sx, self.min_x),
self.calc_xy_index(sy, self.min_y), 0.0, -1)
goal_node = self.Node(self.calc_xy_index(gx, self.min_x),
self.calc_xy_index(gy, self.min_y), 0.0, -1)
open_set_A, closed_set_A = dict(), dict()
open_set_B, closed_set_B = dict(), dict()
open_set_A[self.calc_grid_index(start_node)] = start_node
open_set_B[self.calc_grid_index(goal_node)] = goal_node
current_A = start_node
current_B = goal_node
meet_point_A, meet_point_B = None, None
while 1:
if len(open_set_A) == 0:
print("Open set A is empty..")
break
if len(open_set_B) == 0:
print("Open set B is empty..")
break
c_id_A = min( open_set_A, key=lambda o: self.find_total_cost(open_set_A, o, current_B))
current_A = open_set_A[c_id_A]
c_id_B = min(open_set_B, key=lambda o: self.find_total_cost(open_set_B, o, current_A))
current_B = open_set_B[c_id_B]
# show graph
if show_animation: # pragma: no cover
plt.plot(self.calc_grid_position(current_A.x, self.min_x),
self.calc_grid_position(current_A.y, self.min_y),
"xc")
plt.plot(self.calc_grid_position(current_B.x, self.min_x),
self.calc_grid_position(current_B.y, self.min_y),
"xc")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect(
'key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
if len(closed_set_A.keys()) % 10 == 0:
plt.pause(0.001)
if current_A.x == current_B.x and current_A.y == current_B.y:
print("Found goal")
meet_point_A = current_A
meet_point_B = current_B
break
# Remove the item from the open set
del open_set_A[c_id_A]
del open_set_B[c_id_B]
# Add it to the closed set
closed_set_A[c_id_A] = current_A
closed_set_B[c_id_B] = current_B
# expand_grid search grid based on motion model
for i, _ in enumerate(self.motion):
c_nodes = [self.Node(current_A.x + self.motion[i][0],
current_A.y + self.motion[i][1],
current_A.cost + self.motion[i][2],
c_id_A),
self.Node(current_B.x + self.motion[i][0],
current_B.y + self.motion[i][1],
current_B.cost + self.motion[i][2],
c_id_B)]
n_ids = [self.calc_grid_index(c_nodes[0]),
self.calc_grid_index(c_nodes[1])]
# If the node is not safe, do nothing
continue_ = self.check_nodes_and_sets(c_nodes, closed_set_A,
closed_set_B, n_ids)
if not continue_[0]:
if n_ids[0] not in open_set_A:
# discovered a new node
open_set_A[n_ids[0]] = c_nodes[0]
else:
if open_set_A[n_ids[0]].cost > c_nodes[0].cost:
# This path is the best until now. record it
open_set_A[n_ids[0]] = c_nodes[0]
if not continue_[1]:
if n_ids[1] not in open_set_B:
# discovered a new node
open_set_B[n_ids[1]] = c_nodes[1]
else:
if open_set_B[n_ids[1]].cost > c_nodes[1].cost:
# This path is the best until now. record it
open_set_B[n_ids[1]] = c_nodes[1]
rx, ry = self.calc_final_bidirectional_path(
meet_point_A, meet_point_B, closed_set_A, closed_set_B)
return rx, ry
# takes two sets and two meeting nodes and return the optimal path
def calc_final_bidirectional_path(self, n1, n2, setA, setB):
rx_A, ry_A = self.calc_final_path(n1, setA)
rx_B, ry_B = self.calc_final_path(n2, setB)
rx_A.reverse()
ry_A.reverse()
rx = rx_A + rx_B
ry = ry_A + ry_B
return rx, ry
def calc_final_path(self, goal_node, closed_set):
# generate final course
rx, ry = [self.calc_grid_position(goal_node.x, self.min_x)], \
[self.calc_grid_position(goal_node.y, self.min_y)]
parent_index = goal_node.parent_index
while parent_index != -1:
n = closed_set[parent_index]
rx.append(self.calc_grid_position(n.x, self.min_x))
ry.append(self.calc_grid_position(n.y, self.min_y))
parent_index = n.parent_index
return rx, ry
def check_nodes_and_sets(self, c_nodes, closedSet_A, closedSet_B, n_ids):
continue_ = [False, False]
if not self.verify_node(c_nodes[0]) or n_ids[0] in closedSet_A:
continue_[0] = True
if not self.verify_node(c_nodes[1]) or n_ids[1] in closedSet_B:
continue_[1] = True
return continue_
@staticmethod
def calc_heuristic(n1, n2):
w = 1.0 # weight of heuristic
d = w * math.hypot(n1.x - n2.x, n1.y - n2.y)
return d
def find_total_cost(self, open_set, lambda_, n1):
g_cost = open_set[lambda_].cost
h_cost = self.calc_heuristic(n1, open_set[lambda_])
f_cost = g_cost + h_cost
return f_cost
def calc_grid_position(self, index, min_position):
"""
calc grid position
:param index:
:param min_position:
:return:
"""
pos = index * self.resolution + min_position
return pos
def calc_xy_index(self, position, min_pos):
return round((position - min_pos) / self.resolution)
def calc_grid_index(self, node):
return (node.y - self.min_y) * self.x_width + (node.x - self.min_x)
def verify_node(self, node):
px = self.calc_grid_position(node.x, self.min_x)
py = self.calc_grid_position(node.y, self.min_y)
if px < self.min_x:
return False
elif py < self.min_y:
return False
elif px >= self.max_x:
return False
elif py >= self.max_y:
return False
# collision check
if self.obstacle_map[node.x][node.y]:
return False
return True
def calc_obstacle_map(self, ox, oy):
self.min_x = round(min(ox))
self.min_y = round(min(oy))
self.max_x = round(max(ox))
self.max_y = round(max(oy))
print("min_x:", self.min_x)
print("min_y:", self.min_y)
print("max_x:", self.max_x)
print("max_y:", self.max_y)
self.x_width = round((self.max_x - self.min_x) / self.resolution)
self.y_width = round((self.max_y - self.min_y) / self.resolution)
print("x_width:", self.x_width)
print("y_width:", self.y_width)
# obstacle map generation
self.obstacle_map = [[False for _ in range(self.y_width)]
for _ in range(self.x_width)]
for ix in range(self.x_width):
x = self.calc_grid_position(ix, self.min_x)
for iy in range(self.y_width):
y = self.calc_grid_position(iy, self.min_y)
for iox, ioy in zip(ox, oy):
d = math.hypot(iox - x, ioy - y)
if d <= self.rr:
self.obstacle_map[ix][iy] = True
break
@staticmethod
def get_motion_model():
# dx, dy, cost
motion = [[1, 0, 1],
[0, 1, 1],
[-1, 0, 1],
[0, -1, 1],
[-1, -1, math.sqrt(2)],
[-1, 1, math.sqrt(2)],
[1, -1, math.sqrt(2)],
[1, 1, math.sqrt(2)]]
return motion
def main():
print(__file__ + " start!!")
# start and goal position
sx = 10.0 # [m]
sy = 10.0 # [m]
gx = 50.0 # [m]
gy = 50.0 # [m]
grid_size = 2.0 # [m]
robot_radius = 1.0 # [m]
# set obstacle positions
ox, oy = [], []
for i in range(-10, 60):
ox.append(i)
oy.append(-10.0)
for i in range(-10, 60):
ox.append(60.0)
oy.append(i)
for i in range(-10, 61):
ox.append(i)
oy.append(60.0)
for i in range(-10, 61):
ox.append(-10.0)
oy.append(i)
for i in range(-10, 40):
ox.append(20.0)
oy.append(i)
for i in range(0, 40):
ox.append(40.0)
oy.append(60.0 - i)
if show_animation: # pragma: no cover
plt.plot(ox, oy, ".k")
plt.plot(sx, sy, "og")
plt.plot(gx, gy, "ob")
plt.grid(True)
plt.axis("equal")
bidir_a_star = BidirectionalAStarPlanner(ox, oy, grid_size, robot_radius)
rx, ry = bidir_a_star.planning(sx, sy, gx, gy)
if show_animation: # pragma: no cover
plt.plot(rx, ry, "-r")
plt.pause(.0001)
plt.show()
if __name__ == '__main__':
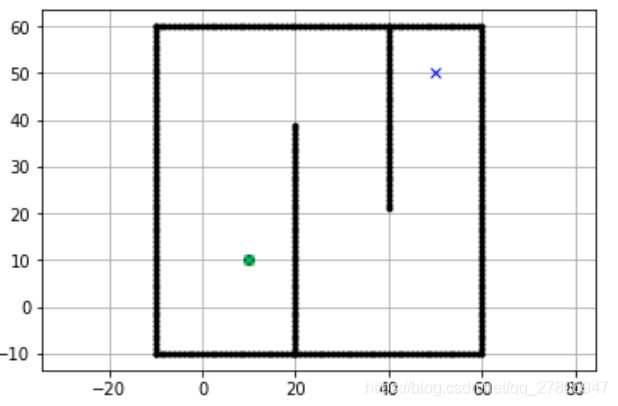
main()其栅格地图如下图所示:
其最终搜索的路径如下图所示:
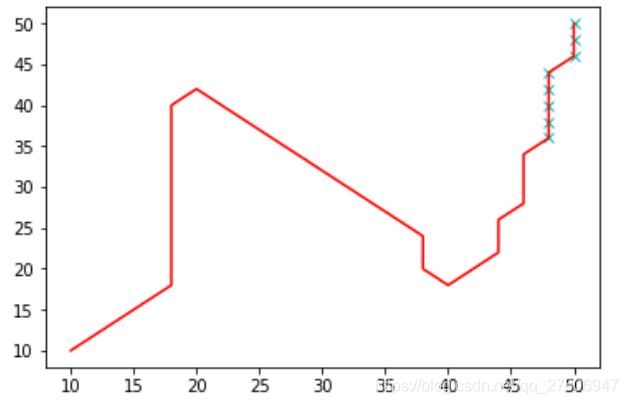
最后需要注意的是本文使用的加权A*!