V-REP教程(九) Paths
V-REP教程(九) Paths
- Paths
- Path edit mode
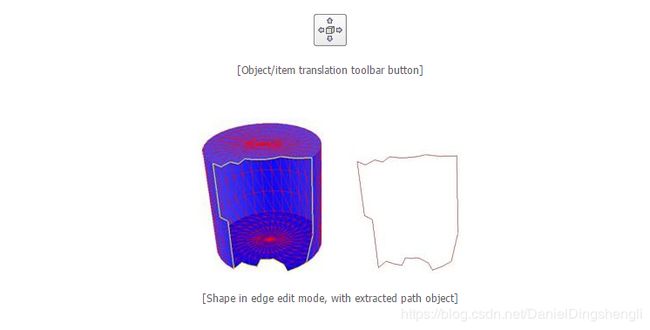
- Edge edit mode
- Paths2
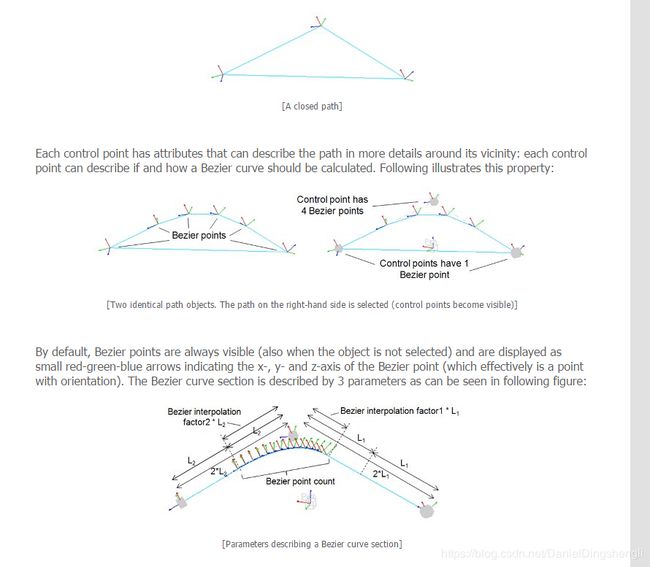
- Path control points and Bezier points 控制点和贝塞尔点
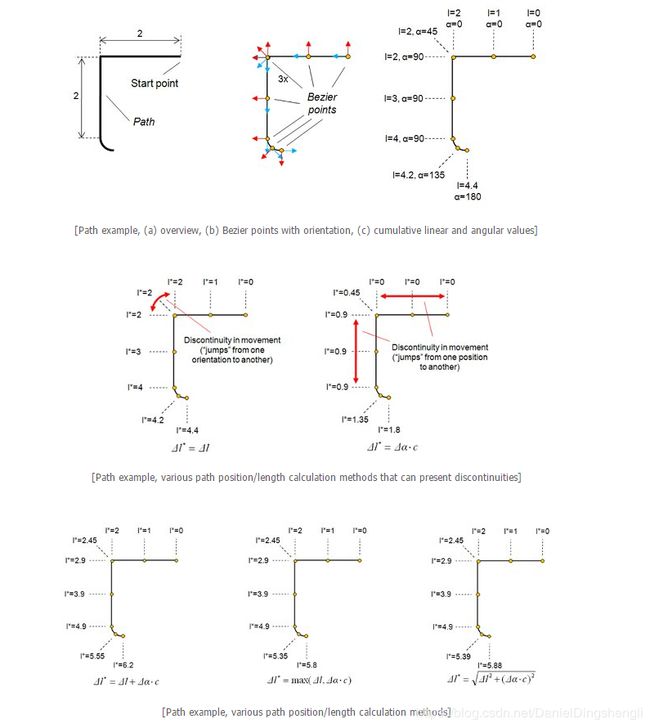
- Path position and length calculation method 位置和长度计算方式
- 应用
- Movement along a Path
- Path shaping 整形功能
- 导入导出路径
Paths
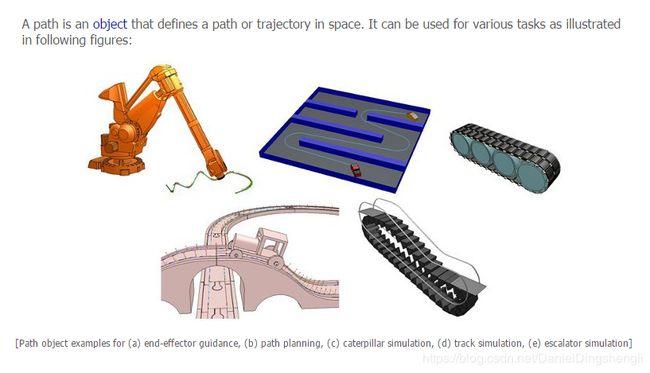
生成Paths的三种方式

path是通过以.csv文件导入
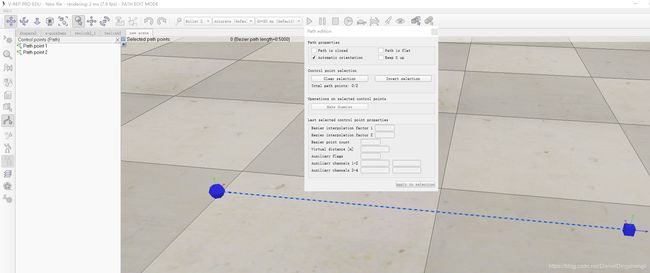
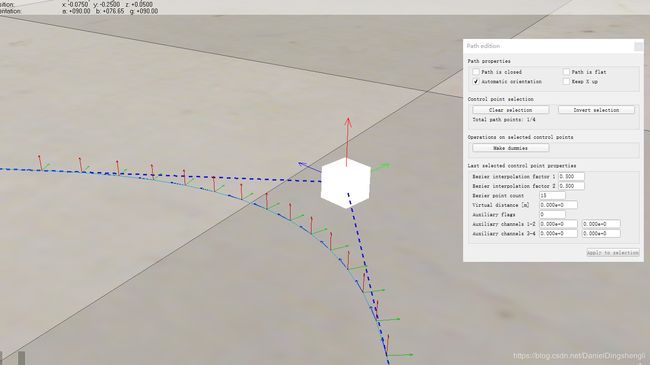
Path edit mode
用
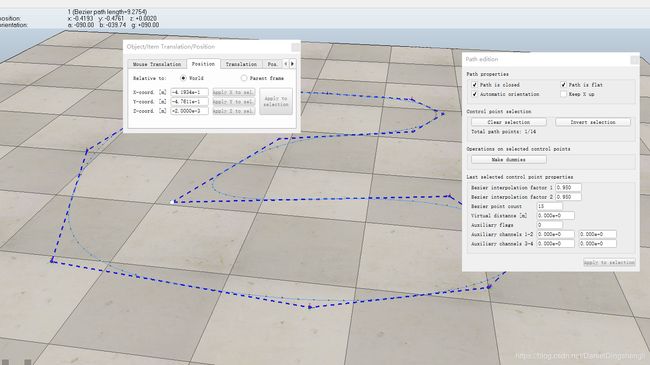
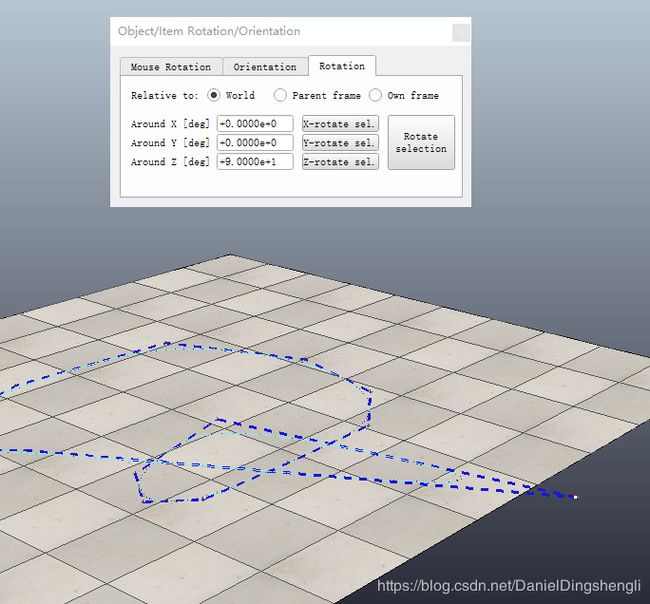

For precise positionning of control points, use the coordinates and transformation dialog. If you want to edit a control point’s orientation, make sure the path’s automatic orientation option is disabled (that option is enabled by default).
左上方Edit可以插入新的点然后调整
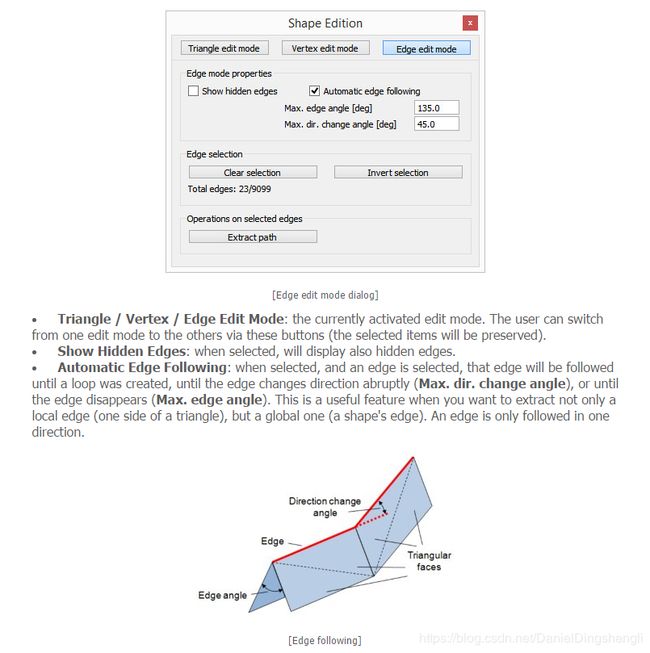
Edge edit mode
看图就能明白
Paths2
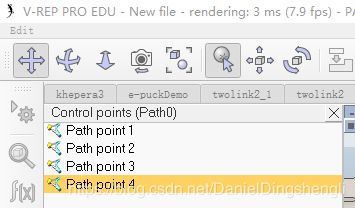
Path control points and Bezier points 控制点和贝塞尔点
看图就行
一般不需要调整
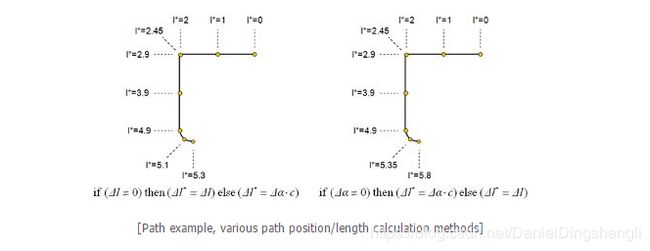
Path position and length calculation method 位置和长度计算方式
想象一个焊接机器人,其末端执行器是焊接设备的尖端;在两个连续的Bezier点之间,末端执行器可以:

移动&&旋转
此外,在某些情况下,我们希望焊炬遵循预先定义的路径,在固定点停止再继续。
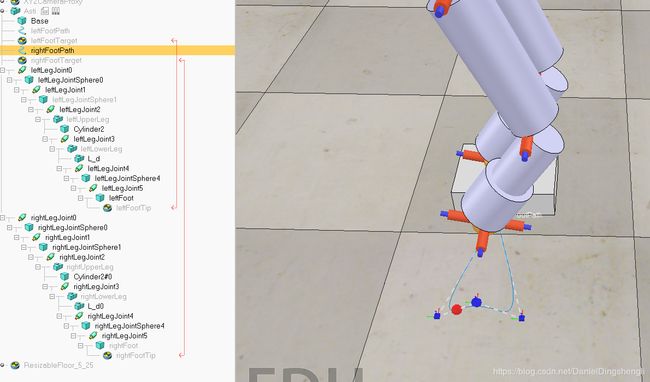
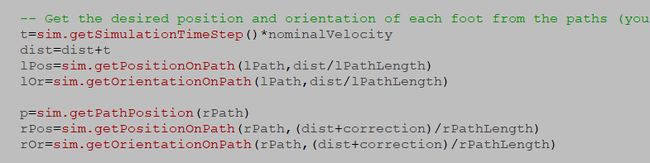
应用
Movement along a Path
现在应该能明白了。
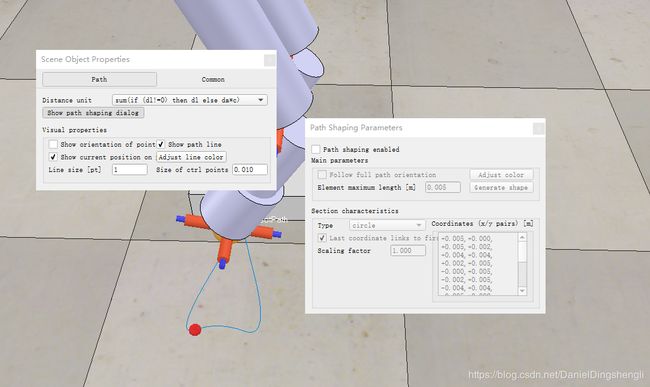
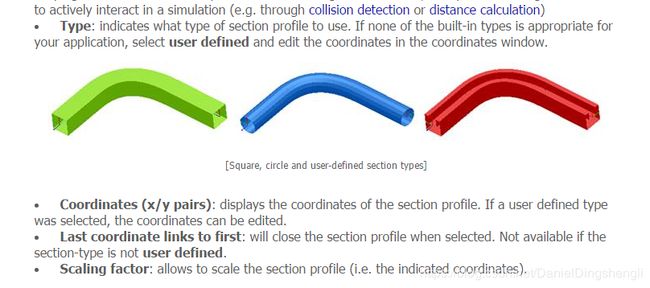
Path shaping 整形功能

导入导出路径

excel软件可以编辑
每行: