转自大神:https://www.cnblogs.com/skywang12345/p/3711512.html
是真的牛逼
看大神的吧 舒服点 我注释了点最后代码的部分
迪杰斯特拉算法介绍
迪杰斯特拉(Dijkstra)算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径。
它的主要特点是以起始点为中心向外层层扩展(广度优先搜索思想),直到扩展到终点为止。
基本思想
通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算)。
此外,引进两个集合S和U。S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。
初始时,S中只有起点s;U中是除s之外的顶点,并且U中顶点的路径是"起点s到该顶点的路径"。然后,从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 然后,再从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 ... 重复该操作,直到遍历完所有顶点。
操作步骤
(1) 初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为"起点s到该顶点的距离"[例如,U中顶点v的距离为(s,v)的长度,然后s和v不相邻,则v的距离为∞]。
(2) 从U中选出"距离最短的顶点k",并将顶点k加入到S中;同时,从U中移除顶点k。
(3) 更新U中各个顶点到起点s的距离。之所以更新U中顶点的距离,是由于上一步中确定了k是求出最短路径的顶点,从而可以利用k来更新其它顶点的距离;例如,(s,v)的距离可能大于(s,k)+(k,v)的距离。
(4) 重复步骤(2)和(3),直到遍历完所有顶点。
单纯的看上面的理论可能比较难以理解,下面通过实例来对该算法进行说明。
迪杰斯特拉算法图解
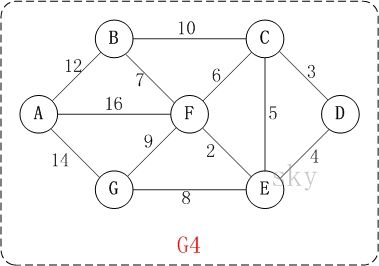
以上图G4为例,来对迪杰斯特拉进行算法演示(以第4个顶点D为起点)。
初始状态:S是已计算出最短路径的顶点集合,U是未计算除最短路径的顶点的集合!
第1步:将顶点D加入到S中。
此时,S={D(0)}, U={A(∞),B(∞),C(3),E(4),F(∞),G(∞)}。 注:C(3)表示C到起点D的距离是3。
第2步:将顶点C加入到S中。
上一步操作之后,U中顶点C到起点D的距离最短;因此,将C加入到S中,同时更新U中顶点的距离。以顶点F为例,之前F到D的距离为∞;但是将C加入到S之后,F到D的距离为9=(F,C)+(C,D)。
此时,S={D(0),C(3)}, U={A(∞),B(23),E(4),F(9),G(∞)}。
第3步:将顶点E加入到S中。
上一步操作之后,U中顶点E到起点D的距离最短;因此,将E加入到S中,同时更新U中顶点的距离。还是以顶点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。
此时,S={D(0),C(3),E(4)}, U={A(∞),B(23),F(6),G(12)}。
第4步:将顶点F加入到S中。
此时,S={D(0),C(3),E(4),F(6)}, U={A(22),B(13),G(12)}。
第5步:将顶点G加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12)}, U={A(22),B(13)}。
第6步:将顶点B加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13)}, U={A(22)}。
第7步:将顶点A加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13),A(22)}。
此时,起点D到各个顶点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。
迪杰斯特拉算法的代码说明
以"邻接矩阵"为例对迪杰斯特拉算法进行说明,对于"邻接表"实现的图在后面会给出相应的源码。
1. 基本定义

// 邻接矩阵
typedef struct _graph
{
char vexs[MAX]; // 顶点集合
int vexnum; // 顶点数
int edgnum; // 边数
int matrix[MAX][MAX]; // 邻接矩阵
}Graph, *PGraph;
// 边的结构体
typedef struct _EdgeData
{
char start; // 边的起点
char end; // 边的终点
int weight; // 边的权重
}EData;
Graph是邻接矩阵对应的结构体。
vexs用于保存顶点,vexnum是顶点数,edgnum是边数;matrix则是用于保存矩阵信息的二维数组。例如,matrix[i][j]=1,则表示"顶点i(即vexs[i])"和"顶点j(即vexs[j])"是邻接点;matrix[i][j]=0,则表示它们不是邻接点。
EData是邻接矩阵边对应的结构体。
2. 迪杰斯特拉算法
1 /* 2 * Dijkstra最短路径。 3 * 即,统计图(G)中"顶点vs"到其它各个顶点的最短路径。 4 * 5 * 参数说明: 6 * G -- 图 7 * vs -- 起始顶点(start vertex)。即计算"顶点vs"到其它顶点的最短路径。 8 * prev -- 前驱顶点数组。即,prev[i]的值是"顶点vs"到"顶点i"的最短路径所经历的全部顶点中,位于"顶点i"之前的那个顶点。 9 * dist -- 长度数组。即,dist[i]是"顶点vs"到"顶点i"的最短路径的长度。 10 */ 11 void dijkstra(Graph G, int vs, int prev[], int dist[]) 12 { 13 int i,j,k; 14 int min; 15 int tmp; 16 int flag[MAX]; // flag[i]=1表示"顶点vs"到"顶点i"的最短路径已成功获取。 17 18 // 初始化 19 for (i = 0; i < G.vexnum; i++) 20 { 21 flag[i] = 0; // 顶点i的最短路径还没获取到。 22 prev[i] = 0; // 顶点i的前驱顶点为0。 23 dist[i] = G.matrix[vs][i];// 顶点i的最短路径为"顶点vs"到"顶点i"的权。 24 } 25 26 // 对"顶点vs"自身进行初始化 27 flag[vs] = 1; 28 dist[vs] = 0; 29 30 // 遍历G.vexnum-1次;每次找出一个顶点的最短路径。 31 for (i = 1; i < G.vexnum; i++) 32 { 33 // 寻找当前最小的路径; 34 // 即,在未获取最短路径的顶点中,找到离vs最近的顶点(k)。 35 min = INF; 36 for (j = 0; j < G.vexnum; j++) 37 { 38 if (flag[j]==0 && dist[j]<min) 39 { 40 min = dist[j]; 41 k = j; 42 } 43 } 44 // 标记"顶点k"为已经获取到最短路径 45 flag[k] = 1; 46 47 // 修正当前最短路径和前驱顶点 48 // 即,当已经"顶点k的最短路径"之后,更新"未获取最短路径的顶点的最短路径和前驱顶点"。 49 for (j = 0; j < G.vexnum; j++) 50 { 51 tmp = (G.matrix[k][j]==INF ? INF : (min + G.matrix[k][j])); // 防止溢出 52 if (flag[j] == 0 && (tmp < dist[j]) ) 53 { 54 dist[j] = tmp; 55 prev[j] = k; 56 }
/*关于这个tmp 就是新增了一个点,这个点先和周遭的点连一边 判断语句是距离是不是==INF,是的话连不上还是连不上,不是的话,连上再+它距离vs的
距离(已经是最短路径了)==其他点到vs的最短路径通过这个点K之后等于多少,,这是tmp的意义, 再和人点之前的比,看看是否通过新增的点K,
最短路径是否发生了变化,我想到了克鲁斯卡尔算法,那个是求最小生成树的,就是遍历图中所有的点,n-1条边,权值最小*/ 57 } 58 } 59 60 // 打印dijkstra最短路径的结果 61 printf("dijkstra(%c): \n", G.vexs[vs]); 62 for (i = 0; i < G.vexnum; i++) 63 printf(" shortest(%c, %c)=%d\n", G.vexs[vs], G.vexs[i], dist[i]); 64 }