u-blox LEA-4S/GPS实例制作
我们先来看看u-blox LEA-4S的引脚排列:
典型应用范例

u-blox 无源天线GPS版本参考外观图
GPS模块电源供电的处理及其重要性
由于LEA-4S/4H/4S-1系列高感GPS,灵敏度实在是太高,甚至可以在弱信号环境接受到微弱的反射信号从而应用于恶劣环境导航,当然,u-blox有自己的一套GPS算法,可以在强信号滤除这些影响精度的干扰或反射信号,所以在弱信号环境,虽然能收到信号,但是这些信号往往包含反射及折身信号,往往飘移及误差也会加大,但我们从现实出发,客户在室内定位能够收到一个精度不高但是可以定位的信号往往比普通GPS模块不能收到任何信号感觉肯定要好!
电源处理方案
例如电源前面加上精工的3V LDO,LOD有两个优势,一个是可以提供给模块一个稳定的电源,保证后部分模块工作不会因为电源电压引起的变化而引起电源阻抗的变化,若电源电压变化的同时将会导致电源的内阻稳定性劣变,也会影响到模块性能的发挥,二来好的LDO可以滤除不纯净的前端信号,可以进行有效的降噪,虽然效率不及DC/DC,但我们认为是有必要加入LDO的.
这样做的原因
LDO的压差越小,消耗的内部功率就会越小,而且有利于LDO本身的温度控制,比较理想的是LDO前级是在4V左右输入,后级3V输出,模块部分150mA已经足够,但对于GPS模块而言,一般情况下,在模块冷启动到模块完全稳定工作时的功率消耗会是平时功耗的1.5-2倍左右的功耗.电源应该加上电感及电容阻成的多重滤波网络,按照最高级别的RF标准设计.
GPS天线的选择及使用
天线的选择
无源天线推荐使用18*18*4以上级别(例如25*25*4的陶瓷天线效果在性能及体积方面往往为表现最佳),我们发现,同种类型越大尺寸的天线往往更容易获得高的灵敏度,例如军用的GPS,为了获得最高级别的灵敏度效果,GPS天线的尺寸足有脸盆大小,真是叫人汗颜!不过发现目前最好的GPS天线类型仍属于平板陶瓷天线,唯一遗憾的是它相对有些方向性及尺寸有些偏大,用超小尺寸贴片型无源天线的客户要特别小心了,由于天线的信号过于微弱可能会导致整机灵敏度不高的问题!
要特别注意从天线端口到RF_IN的引脚之间的PCB连线高频阻抗匹一定要进行50欧姆阻抗匹配,要特别注意高频布线原则,就是天线部分尽可以少受到其它无线RF的干扰.否则会极大的影响到整机的灵敏度,另外无源天线本身信号较弱,RF_IN端的天线输入端走线需要尽量的短,否则会牺牲一定的灵敏度,在RF_IN附件的铺地应该采取均匀的铺地过孔包围RF_IN的设计设计,以保证良好的屏蔽效果,过孔应加绿油以更加强屏蔽外界对其的干扰,在足够空间的情况下可以对其进行金属屏蔽罩处理.
无源天线由于会受到整外壳的影响会产生一定的频率偏差,往往需要天线厂家进行相应的调校,以便达到最好的工作状态,事实证明,在有效调整整机的无源天线的匹配情况下,可以最大限度的发挥出无源天线本身的灵敏度.无源或有源天线后部的PCB接地,则是越大越好,对灵敏度将会产生一定的影响,例如我们常用的车载GPS,往往是整个天线吸在车顶,而车顶相当于一个大的接地反射面,往往会取得非常好的灵敏度.
事实证明
无源天线后部不同的接地面积也反映了不同的灵敏度,自然是铺地面积越大的板子,灵敏度越高,所以在一般情况下应该尽量增加天线后部PCB的铺地面积,同时无源天线应该尽量摆放于后部PCB接地的正中央.天线部分引线应该尽量的避免靠近电源及模块部分,例如以上的RF_IN脚的线路应该避免太近于GPSMODE5或是其它数字部分线路,否则会有部分干扰影响灵敏度!同时天线走线的外围最好能进行细的密包地过孔设计,阻止其它杂波干扰.
有源天线由于陶瓷天线已经在外壳并已进行过调效匹配,所以使用相对简单,并且由于有源天线内部有经过LNA的放大,即使RF_IN走线稍长,影响也比相对较小,适合于较高灵敏度的场合,对于实际制作将会降低相应的难度,而事实上,成功的无源天线跟有源天线的灵敏度是极为接近的,如果灵敏度相差太大不能简单的认为无源天线灵敏度不够,而只能说是无源天线要设计得棒实在是太难!
至于LNA,对LNA的选择是非常严格的,除了放大倍数之外最主要还是噪声系数,因为在放大有效信号的同时会同内部噪音一起放大!如果噪音太大,会极大的影响到GPS灵敏度的发挥.不好的LNA对天线部分有极大的影响.所以各位天线厂家在选择LNA的时候千万不能因为省MONEY而失去重要的参数性能.
友情提示
对于整机的设计而言,模块接地与数字接地应该严格区分并单点接地,对于提高整机的性噪比有一定的影响,要特别注意RF_IN的影响,不要被有源高速器件如高速SD卡/CPU所干扰,对于PMP或手机面言,背光灯所用的高压LED驱动干扰最为严重,要加强屏蔽,以减少对RF部分的影响,机器内部的各种各样的电磁反射/折射会严重的影响机器的灵敏度,除了天线的选择之外,良好的EMI处理是保证设计成功的关键之一.
为什么信噪比会极为重要?
例如在你住在古老的村庄里,晚上睡觉的时候能够听到1公里之外布谷鸟发出的"咕咕"的声音,布谷鸟的声音有多大呢?会跟我们人的喊话声音是相差不大的,甚至于远处青蛙的叫声相信你一定是听得清晰明了,以至于爱失眠的你半夜无法入睡.
反而言之,如果你站在大街上,如火车站,呼啸的火车穿流不息,在这种情况下,恐怕就是有人跟你面对面10米大声吼叫,你也无法知道他说话的内容,因为他的声音全被噪音给掩盖了,我们无法分辩出来相应的内容.但青蛙的叫声,或是布谷鸟的声音或是人声,简单来说是基本相同的音量,为什么会出现这种情况,原因是在噪音太大的环境里无效的噪声将有效信号全给掩盖掉了.反而言之,越是微弱的信号,越需要"掉在地上一根针也能听到"的理想环境才能够分辩,纯静纯静,再纯静,这就是GPS对信噪比要求极高的精髓,也是技术金含量最高原因之所在,所以你也能顺畅理解为什么GPS模块对电源及RF要求高的真正原因了,你也能够准确理解低噪LNA价钱贵的原因了.
GPS模块软件算法处理的重要性
信号的真伪
例如,GPS同时收到两个信号,一个来自于直接的天空卫星直接的信号,信号没有经过任何处理,而另一个信号是经过反射折射之类的信号,信号质量已经劣化,导致误差加大,GPS模块需要提练相应的直接信号.如何辩别这些信号的不同这点是所有GPS厂商设计的秘密,也是顶级GPS与低档GPS本质的区别,也是精度不同的真正原因所在,u-blox敢于从2001年开始认为自己的模块达到了2.5米的精度要求,与瑞士人与生俱来的精度运算及精密滤波处理是分不开的,u-blox的GPS基本上等同于瑞士的钟表,卓而不凡,对精度及品质要求异常严格.
信号的取舍
GPS同时会收到很多的信号,例如同时收到9颗星,它会不会全部直接用于导航呢?答案是不会,它只会从其中挑选信号质量最好的四颗用于导航,它会把9颗星的信号全部进行四颗一组,四颗一组这样的组合运算,然后挑选其中最完美的一组做为最终采纳的信号,这其中又牵涉到了一个组合算法的问题,究竟哪个算法是最完美的,哪种算法能够让精度达到最高?这点不仅要有良好的理论基础,同时还要有长时间的观察细致的实践,这又是GPS设计厂商的一个不公开的秘密武器了.
u-blox能够精确的从这些组合当中挑选最好的真实信号进入后期处理,这些都是一般的GPS厂商无法做到的.
以上线路图当中介绍的是典型最简单的应用及部分GPS模块的基本原理,上面的线路图就是一个最简单的UART电平输出的GPS系统,或是可以跟PC用USB连接了.
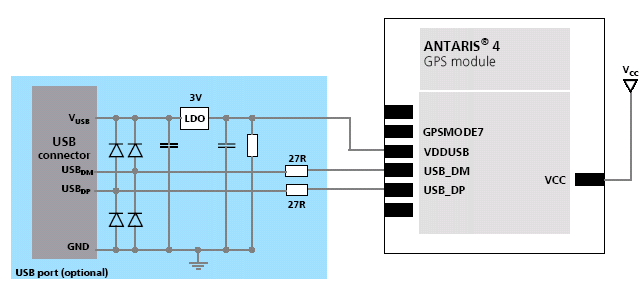
LEA-4S/4H的USB连接接线图
注意,如果是直接跟USB连接,还要注意电源部分的处理,推荐使用增加SII的S-1112B30M 3V LDO,80db的高纹波抵制率:LEA-4S USB接口线路图
LEA-4S的有源天线供电电路两例

u-blox LEA-4S封装尺寸图
