七月算法强化学习 第一课 学习笔记
一、强化学习简介与应用:

1.强化学习定义:
强化学习是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益。其灵感来源于心理学中的行为主义理论,即有机体如何在环境给予的奖励或惩罚的刺激下,逐步形成对刺激的预期,产生能获得最大利益的习惯性行为。

2.强化学习起源:
Artificial Intelligence
Control Theory
Operation Research
Cognitive Science & Psychology
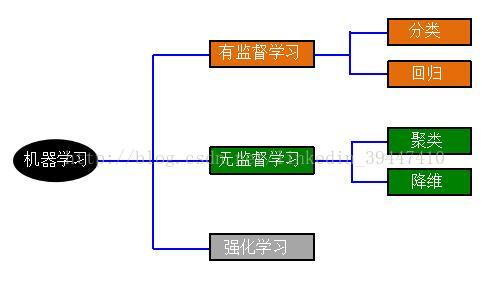
有监督学习:Labeled数据,直接反馈,预测未知label数据
无监督学习:Unlabeled数据,无反馈,寻找数据隐藏结构
强化学习特点:1)无监督数据,只有奖励信号 2)奖励信号不一定实时,大部分情况奖励信号滞后 3)研究的非i.i.d数据,时间序列 4)当前的行为影响后续数据分布
举例:Alpha Go、Atari游戏 、机器人控制、自动驾驶直升机 (http://heli.stanford.edu/)、自动驾驶、自动交易 、etc..
二、强化学习数学模型
如何建立强化学习数学模型:
Model of uncertainty
Environment, actions, Agent knowledge
Focus on decision making
Maximize long-term reward
Reward奖励 Rt 标量函数 奖励假设:所有问题解决的目标都可以被描述成最大化累积奖励
History历史 Ht 历史是观测、行为、奖励的序列:Ht = O1, R1, a1,..., Ot-1, Rt-1, at-1, Ot, Rt, at
State状态 St 状态是所有决定将来的已有的信息,是关于历史的函数 St =f (Ht)
Action动作 at
Sequential Decision Making序列决策:1)目标:选择一定的行为系列以最大化未来的总体奖励 2)这些行为可能是一个长期的序列 3)奖励可能而且通常是延迟的 4)有时候宁愿牺牲即时(短期)的奖励以获取更多的长期奖励



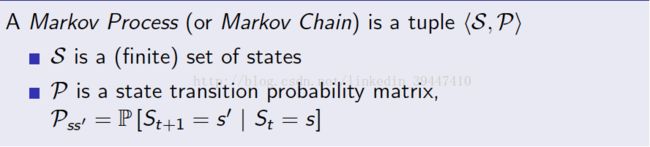
Markov Property:
A state St is Markov iff : P(St+1 | St, St-1,...,S1) = P(St+1 | St)
The state captures all relevant information from the history.
Once the state is known, the history may be thrown away.
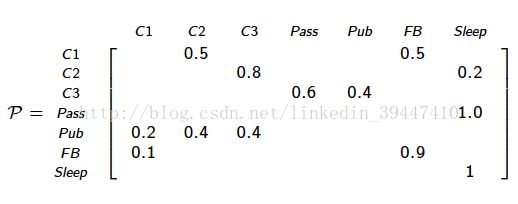
Transition Matrix: Pss’ = P(St+1 =s’ | St = s) (finite state).
How to choose state to obtain a Markov Process?
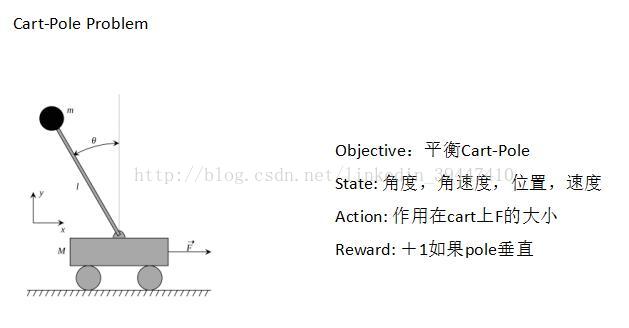
Example: Helicopter (位置,速度,角速度)
State 选择不正确:memory effect !!!
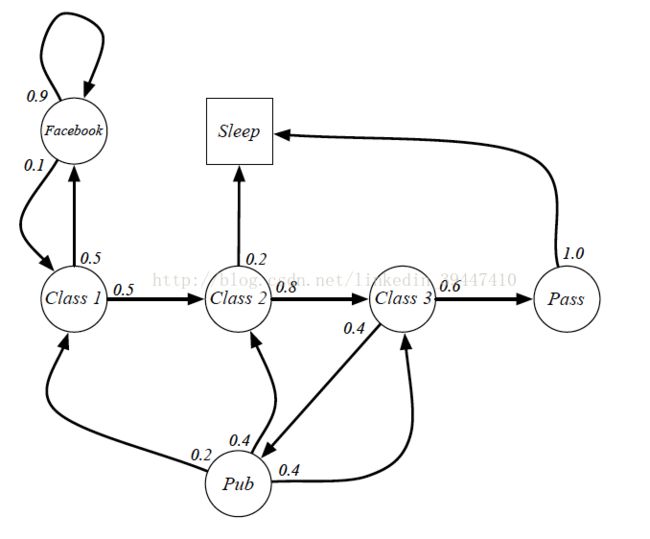
Markov Process马尔科夫过程:
随机过程S1, S2,…满足马尔科夫性
Sample Trajectories:

Markov Decision Process (MDP)马尔科夫决策过程:
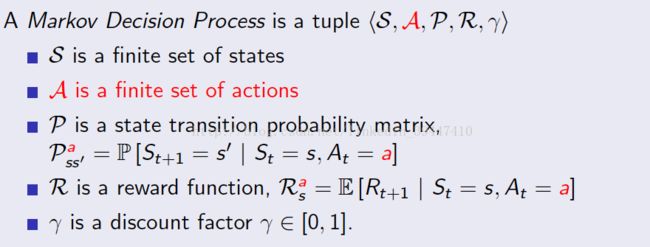
MDP是绝大多数的RL问题的数学表示
马尔科夫性
环境:Pass’ & Ras
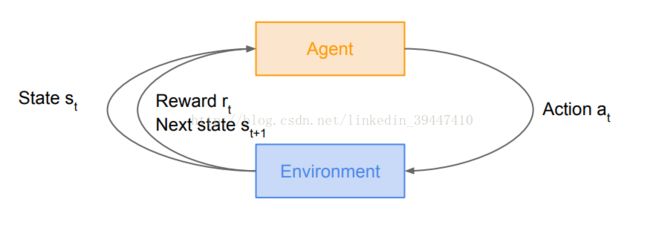
- t=0, 初始状态s0 ~ P(s0)
- while Not done:
- AI根据st选择action at
- 环境给出reward rt ~ R(.|st, at)
- 环境给出下一时刻状态st+1 ~ P(.|st, at)
- AI 接收rt和st+1
- t=0, 初始状态s0 ~ P(s0)
- while Not done:
- AI根据st选择action at
- 环境给出reward rt ~ R(.|st, at)
- 环境给出下一时刻状态st+1 ~ P(.|st, at)
- AI 接收rt和st+1
Policy策略π
Deterministic Policy π : S --> A
Stochastic Policy π(a | s) = P[At = a | St = s]
累计回报Gt:(why discount?)

RL Objective: 找出最优策略π*使得累计回报最大

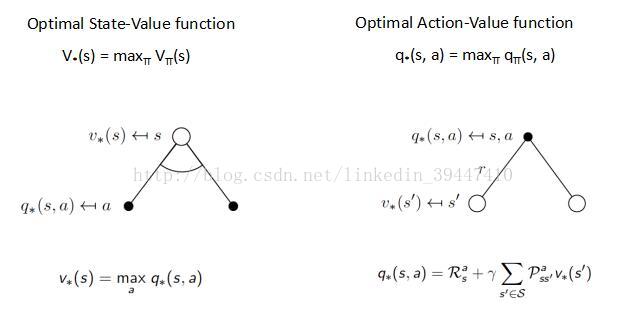
State-Value Function价值函数
评价基于策略π下状态的好坏(长期价值)
表示从状态s开始,遵循策略π能得到的收获的期望值

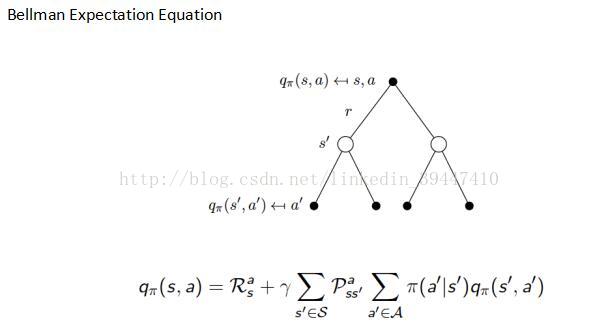
State-action Value Function 动作价值函数
评价基于策略π,在状态s下执行动作a的好坏
表示在状态s下先执行动作a,然后遵循策略π能得到的收获的期望值



三、强化学习算法综述
MDP Problems
MDP Planning: 已知模型,找到最优策略
MDP Learning: 未知模型,理解环境,尝试找到最优策略
RL Algorithms
Value Based
Policy Based
Actor-Critic
RL Algorithms
State and Action space is discrete and small
State and Action space is large: function approximation, Deep RL

四、MDP Planning
给定模型
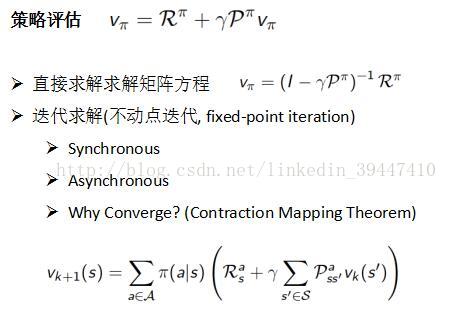
策略评估: 给定策略π,计算累计回报期望值 (求解Bellman Expectation Eq. )

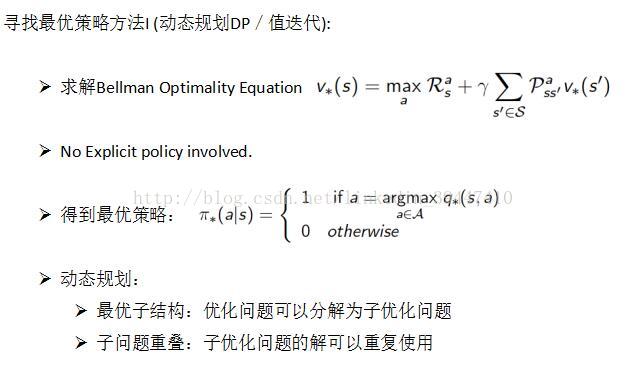
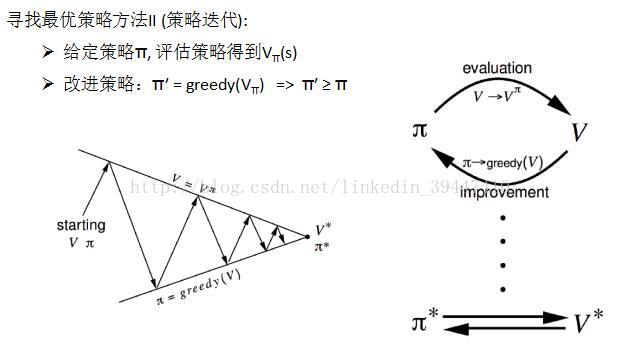
寻找最优策略:
极大化从任何状态开始的累计回报期望值


MDP Planning 总结:
| Problem |
Equation |
Algorithm |
| 策略评估 |
Bellman Expectation Eq. |
Iterative Policy Evaluation |
| 寻找最优策略 |
Bellman Expectation Eq. + Greedy Policy Improvement |
Policy Iteration |
| 寻找最优策略 |
Bellman Optimality Eq. |
Value Iterat |
For each iteration, O(|A||S|2)
Iteration numbers, Poly(|A|, |S|, 1/(1-γ))
Policy Iteration
For each iteration, O(|S|3 + |A||S|2)
|S|3 for policy evaluation, |A||S|2 for improvement
Iteration numbers: unknown, but faster in practice.