仿射变换(affine transformation)
官方教程
原理
- 对原图像的物理坐标进行变换、旋转、比例等操作,从而得到目标图像。
- 两幅图像之间的关系可以用一个 2 × 3 的矩阵表示:
A = [ a 11 a 12 a 21 a 22 ] B = [ b 11 b 21 ] A=\left[ \begin{matrix} a_{11}& a_{12} \\ a_{21} & a_{22} \\ \end{matrix} \right]\space \space \space \space B=\left[ \begin{matrix} b_{11} \\ b_{21} \\ \end{matrix} \right] A=[a11a21a12a22] B=[b11b21]
那么: M = [ a 11 a 12 b 11 a 21 a 22 b 21 ] M=\left[ \begin{matrix} a_{11}& a_{12} & b_{11}\\ a_{21} & a_{22} & b_{21}\\ \end{matrix} \right] M=[a11a21a12a22b11b21]
假如使用A、B转换一个图像 X = [ x y ] X=\left[ \begin{matrix} x\\ y\\ \end{matrix} \right] X=[xy]: 目标图像: T = A T=A T=A* [ x y ] + B \left[ \begin{matrix} x\\ y\\ \end{matrix} \right]+B [xy]+B ,或者直接等于: M ∗ [ x y 1 ] = [ a 11 x + a 12 y + b 11 a 21 x + a 22 y + b 21 ] M*\left[ \begin{matrix} x\\ y\\ 1\\ \end{matrix} \right]=\left[ \begin{matrix} a_{11}x+a_{12}y+b_{11}\\ a_{21}x + a_{22}y+b_{21}\\ \end{matrix} \right] M∗⎣⎡xy1⎦⎤=[a11x+a12y+b11a21x+a22y+b21]
- 假如我们已知原图 X X X和仿射矩阵 M M M,则目标图像为: T = M ∗ X T=M*X T=M∗X。但是如何得到仿射矩阵,可由原图中三个点和目标图中三个点,他们的对应关系就是仿射矩阵。
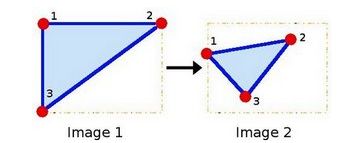
对于每个点,都有两个对应的等式,一共有3个点,6个等式;对应 M M M里面的6个参数,所以可以得到唯一的仿射矩阵 M M M
代码
#include 结果:第一张原图,第二张经过仿射变换之后,第三张再经过顺时针旋转50 ° \degree °的结果

OpenCV API
- 计算仿射矩阵map_matrix ( 2×3),
Mat cv::getAffineTransform
(
const Point2f src[], // 原图像的三个顶点
const Point2f dst[] //目的图像的三个顶点
)

- 对一幅图像进行仿射变换
void cv::warpAffine void cv::warpAffine
(
InputArray src, // 原图
OutputArray dst, // 目的图,大小是dsize,和原图类型一样
InputArray M, // 2×3 的仿射变换矩阵
Size dsize, // 输出图像大小
int flags = INTER_LINEAR, // 插值方式
int borderMode = BORDER_CONSTANT, // 边界处理方式
const Scalar & borderValue = Scalar() // 如果是CONSTANT型border,此参数是边界的值
)
计算公式:
- 计算旋转矩阵(2×3 )
Mat cv::getRotationMatrix2D
(
Point2f center, //旋转中心
double angle, // 旋转角度(单位: ° \degree °),正数 意味着逆时针
double scale //放大、缩小的比例
)
