AutoAssign 论文学习
Abstract
本文中,作者通过一种完全可微的标签分配策略,提出了一个anchor-free的目标检测器,叫做AutoAssign。通过产生正的和负的权重映射,动态调整每个位置的预测,它可以自动地判断正/负样本。作者提出了一个中心加权模块,调节具体类别的先验分布,以及一个置信度加权模块来调整每个实例的标签策略。整个标签分配的过程是可微的,无需额外修改就可迁移到其它数据集和任务上。在MS COCO数据集上的实验表明,该方法要比目前最佳的采样策略高 ∼ 1 % \sim 1\% ∼1%AP。而且,本文的最佳模型可以取得 52.1 % 52.1\% 52.1%的AP,超越现有的单阶段检测器。此外,在PASCAL VOC、Objects365和WiderFace 数据集上,AutoAssign 也展现了很强的应用性。
1. Introduction
目前 state of the art 的目标检测器都采用常见的密集预测的方式。双阶段(RPN部分)和单阶段检测器在每个CNN特征的位置上,通过不同尺度、宽高比和类别,以一种正规的、密集采样的方式来预测物体。而且,由于当前基于CNN的目标检测器通常采用多尺度的特征(例如FPN)来缓解尺度差异,标签分配就不仅要在空间特征图上选择位置,也要选择合适的特征层级尺度。
如图1所示,现有的检测器主要基于人为的前验,选择正样本和负样本:(1) 基于anchor的检测器如RetinaNet会预设一些anchors,它们在每个位置上的尺度和宽高比不同,需要借助IOU在空间和尺度层级的特征图上选取正样本和负样本。(2) anchor-free 检测器如FCOS,会采样每个物体中心区域的固定比例大小,作为空间正样本,然后通过预先设置的尺度约束来选择FPN的某个阶段。这些检测器按照物体的前验分布来设计它们的标签策略,在VOC和COCO benchmarks上也是非常有效的。
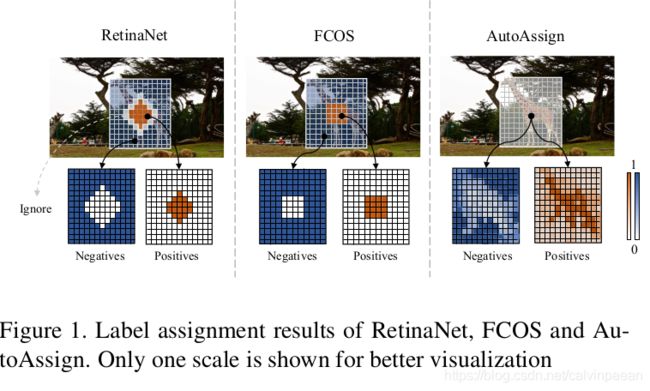
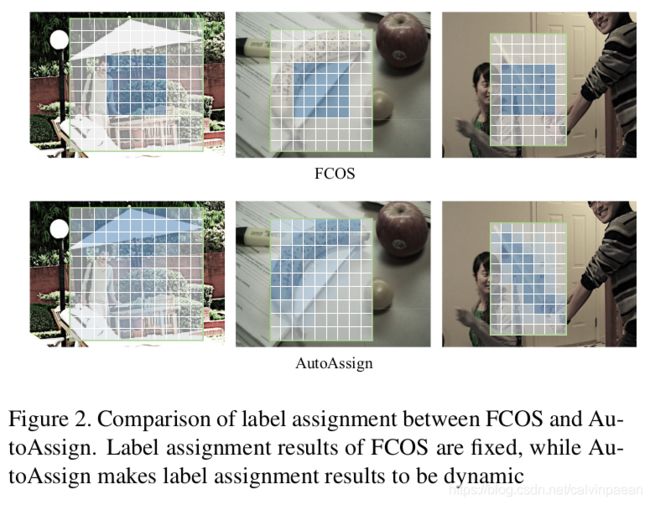
但是,如图2所示,在现实世界中,不同类别和场景的物体的外观差异很大。固定的中心采样策略可能会将物体外边的位置选作正样本。直觉上说,采样物体上的位置要比单纯的背景好,因为这些位置更容易输出较高分类置信度。另一方面,尽管CNN可以学习偏移量,但当背景被选做正样本时,这些特征就会不利于模型的表现。
因此,上述固定的策略可能就不会在空间和尺度维度上选择最适合的位置。除了人为设计的策略之外,最近一些工作提出了部分依赖于数据和动态标签分配的策略。GuidedAnchoring和MetaAnchor 会在采样之前,动态地调整 anchor 先验的形状,而其它的方法则在空间或尺度维度上,自适应地调整每个物体的采样策略。这些策略只会将部分的标签分配变为数据驱动的,而其余部分仍然受到人为设计的约束,阻碍标签分配的进一步优化。
本文中,作者提出了一个完全可微的标签分配策略。如图1所示,作者遵循 anchor-free 的方式(如FCOS)直接预测每个位置的目标,没用人为设计的anchors。为了保留足够多的位置进一步优化,在所有的尺度层级上,作者首先将一个边框内的所有点看作为正负候选样本。然后在训练损失函数中,依据所产生的正负权重图来修改预测。为了适应不同类别和尺度内的分布,作者提出了一个类别加权模块,叫做中心加权,来学习每个类别的分布。为了适应每个实例的外观和尺度,作者提出了一个置信度加权模块,调节空间和尺度维度上每个位置的正负置信度。然后,作者将两个模块结合起来,产生所有位置的正负权重图。整个加权过程是可微的,因此可以通过反向传播来优化。
总之,本文的贡献有三个方面:
- 针对密集目标检测,提出了一个新的可微的标签分配策略,叫做AutoAssign,它自动地对每个实例分配正负样本。而且,该方式可以迁移到不同的数据集和任务上。
- 提出了2个加权模块(中心加权和置信度加权),在空间和尺度维度上自适应地调节类别分布,以及实例采样策略。
- 在COCO数据集和其他数据集上,进行了广泛的实验,证明AutoAssign的有效性。
2. Related Work
2.1 Fixed Label Assignment
经典的目标检测器通过预先判定的策略来采样正负样本。Faster R-CNN中的RPN会在每个位置上根据不同的尺度和宽高比,预先设定一些anchors。然后对于每个实例,计算 anchor 的 IOU 来指导其在尺度和空间维度上的标签。该基于anchor的策略迅速地主导了当前的检测器,并扩展至多尺度的输出特征,如YOLO、SSD和RetinaNet。最近学术圈开始关注anchor-free的检测器,无需设定anchor。FCOS摒弃了先验anchor设定,直接将每个物体的边框中心点附近的区域视作正样本。在尺度维度,它们会预先定义每个FPN阶段的尺度范围,从而标注每个实例。基于anchor和anchor-free的策略都需要数据分布的先验中心区域,边框中心点附近的空间位置更可能包含物体。
其它的anchor-free检测器则利用了不同的原理,将边框看作为关键点,将回归任务变换为热力图上的分类。这类检测器的特征与基于边框回归的检测器囧然不同。因此不在本文考虑范围内。
2.2 动态标签分配
由于固定的分配策略对于多样化的目标分布并不会是最优的,近来一些目标检测器提出了自适应机制,改进标签分配。GuidedAnchoring 利用语义特征来指导anchor设定,动态调整anchor的形状来适应不同的物体分布,而 MetaAnchor 则在训练过程中随机选取任意形状的 anchor,来覆盖不同类别的物体边框。除了改变anchor先验,另一些工作则直接对每个物体的采样策略做修改。FSAF 通过最小的训练损失值,动态将每个实例分配至最适合的FPN特征层级。SAPD 则对anchor正样本进行重新加权,使用额外的meta-net 来选择合适的FPN阶段。FreeAnchor 会基于每个物体的IOU,构建top-k个anchor候选框,然后使用Mean-Max函数来对选中的anchors加权,[9]设计了另一个加权函数来去除无效的anchors。ATSS 通过动态IOU阈值,根据实例的统计特征,提出了一个自适应的训练样本选取机制。
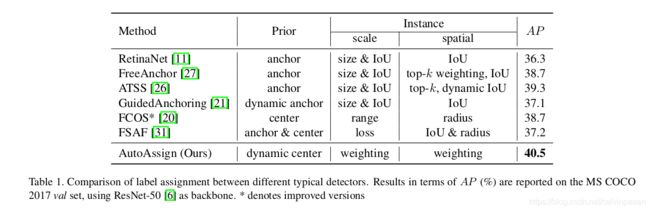
为了从一个更加全面的角度来展示现有的标签分配策略,作者在表1中列出了一些代表性方法的核心组建,一些是与先验有关的,另一些是与实例有关的。很清楚,与基于启发式学习的 RetinaNet 和 FCOS 不同,现有的动态策略中,标签分配中只有部分构成是数据驱动的。相反,其它的部分则依然依照了人工规则。
3. AutoAssign
3.1 Overview
AutoAssign 以完全的数据驱动的方式处理标签分配问题。它从零开始构建,没有任何传统的构成,如 anchors、IoU阈值、top-k或尺度范围。它直接使用网络的预测来动态调节每个位置正负样本的置信度。
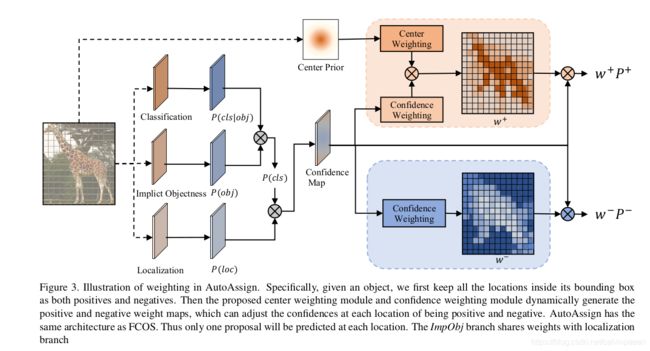
为了优化整个标签分配过程,作者提出了一个完全可微的策略,在空间和尺度维度上动态调节具体类别和具体实例的采样策略。在图3中展示了该策略的框架。作者首先采用anchor-free的方式来摒弃预先设计的anchors,在每个特征位置上直接预测物体。对于每个实例,作者将不同尺度层级上的边框内的所有位置看作为正样本或负样本。然后在训练中,作者输出正负权重图 w + w^+ w+和 w − w^- w−来准确地调整正负样本的预测。因此,作者将整个标签分配步骤变换为2个权重图。
为了适应不同类别的分布,作者提出了类别相关、依赖于数据的加权模块,叫做中心点加权。它首先得到标准的中心点先验,然后学习每个类别的分布。
为了适应每个实例的外观和尺度,作者进一步提出了一个实例相关的加权模块,叫做置信度加权。它基于每个物体的预测置信度,动态地对空间和尺度维度的位置进行加权。
最终,作者将2个加权模块结合起来,为所有的位置产生正负权重。给定一个物体 n n n,作者将其训练损失 L n ( θ ) L_n(\theta) Ln(θ)表示为:
L n ( θ ) = − log ( ∑ i ∈ S n ω i + P i + ) − ∑ i ∈ S n log ( 1 − ω i − P i − ) L_n(\theta) = -\log (\sum_{i\in S_n} \omega_i^+ P_i^+) - \sum_{i\in S_n} \log (1 - \omega_i^- P_i^-) Ln(θ)=−log(i∈Sn∑ωi+Pi+)−i∈Sn∑log(1−ωi−Pi−)
其中 S n S_n Sn表示所有尺度层级上边框内所有的位置。对于位置 i ∈ S n i\in S_n i∈Sn,它是正的或负的概率表示为 P i + P_i^+ Pi+和 P i − P_i^- Pi−,由该网络来预测。 ω i + \omega_i^+ ωi+和 ω i − \omega_i^- ωi−是中心加权和置信度加权所产生的权重图。
3.2 中心点加权
先验分布是标签分配的一个基本元素,特别是在训练的早期阶段。通常,物体的分布服从于中心先验。但是,不同类别的物体有着不同的分布,如长颈鹿和人。继续使用中心位置采样就无法获取现实世界中不同实例的分布。对于不同类别的物体而言,自适应的中心点分布更有效。
基于中心先验,作者提出了一个带有可学习参数的、与类别相关的具有高斯形状的加权函数 G G G。“与类别相关”意味着每个类别都有其独特的参数( μ , σ \mu, \sigma μ,σ),同一类别的物体共享参数。 G G G的定义是:
G ( d ⃗ ∣ μ ⃗ , σ ⃗ ) = e − ( d ⃗ − μ ⃗ ) 2 2 σ ⃗ 2 G(\vec d | \vec \mu, \vec \sigma) = e^{\frac{-(\vec d - \vec \mu)^2}{2\vec \sigma^2}} G(d∣μ,σ)=e2σ2−(d−μ)2
其中 d ⃗ \vec d d表示物体内某一位置相对于其边框中心,在 x x x轴和 y y y轴上的偏移量,可以是负数。 μ ⃗ \vec \mu μ和 σ ⃗ \vec \sigma σ是形状 ( K , 2 ) (K,2) (K,2)的可学习参数。 K K K是一个数据集中类别的个数。每个类别有2个参数,对应着空间维度上的 x x x轴和 y y y轴。因为 G G G会对训练损失函数做一定贡献,参数可以通过反向传播学习。
直观地, μ ⃗ \vec \mu μ控制每个类别的边框中心偏移量。 σ ⃗ \vec \sigma σ基于类别的特征,计算每个位置的重要度。因此 σ ⃗ \vec \sigma σ 通过合理的权重,决定多少个点可以有效地对正样本损失发挥作用。
我们也需要注意到, G G G是用于所有的FPN阶段。由于同一类别的物体有着任意的大小和宽高比,最适合的位置可能出现在任意一个FPN阶段。而且,为了弥补 FPN 不同下采样率所引起的干扰,作者通过FPN阶段的缩小比值对距离 d ⃗ \vec d d做了归一化。
3.3 置信度加权
现有的动态策略设计的依据是,网络可以很容易地学习正确的样本,其置信度都较高,而对于较差的样本,它预测出的置信度都较低。特别地,置信度指示器在尺度选择(损失指示器)和空间分配(anchor置信度)中被证明很有效。在置信度加权中,作者提出了一个协同的置信度指示器,既有分类的,也有定位的,指导空间和尺度维度的加权策略。
3.3.1 分类置信度
给定一个空间位置 i i i,它的分类置信度可以定义为 P i ( c l s ∣ θ ) P_i(cls|\theta) Pi(cls∣θ),目标类别的概率直接由网络预测。 θ \theta θ表示模型的参数。但是,为了保证所有合理的位置都被考虑到,作者首先考虑了边框内的所有空间位置。由于一个物体很难完全填满一个边框,初始的正样本集合倾向于包含部分背景区域。如果某位置是背景区域,该位置所有的类别预测都是不合理的。所以将许多背景位置作为正样本会损害检测性能。
为了抑制假阳样本,作者提出了一个新的Implicit-Objectness分支,如图3所示。它和RPN或YOLO中的Objectness工作方式类似,是一个前景和背景的二元分类任务。但是这里我们有另一个问题,缺乏显式的标签。RPN和YOLO使用连续的正标签来实施预先定义的标签分配,而我们需要动态地找到并强调正样本。
因此作者一起优化了分类分支和Objectness分支,它不需要显式的标签。这也就是为什么它叫做Implicit-Objectness。对于一个位置 i ∈ S n i\in S_n i∈Sn,使用了ImpObj之后,分类置信度 P i ( c l s ∣ θ ) P_i(cls|\theta) Pi(cls∣θ)的定义是:
P i ( c l s ∣ θ ) = P i ( c l s ∣ o b j , θ ) P i ( o b j ∣ θ ) P_i(cls|\theta) = P_i(cls|obj, \theta) P_i(obj|\theta) Pi(cls∣θ)=Pi(cls∣obj,θ)Pi(obj∣θ)
其中ImpObj就是 P i ( o b j ∣ θ ) P_i(obj|\theta) Pi(obj∣θ),代表位置 i i i作为前景或背景的概率。 P i ( c l s ∣ o b j , θ ) P_i(cls|obj, \theta) Pi(cls∣obj,θ)是位置 i i i是某一类别的概率,假设我们知道它是前景还是背景。如图3所示, P i ( c l s ∣ o b j , θ ) P_i(cls|obj, \theta) Pi(cls∣obj,θ)是分类输出。它和RetinaNet中的分类分支一样。
为了从另一个角度理解ImpObj,我们可以将之前的标签分配策略看作为人为选择前景,即 P i ( o b j ) = 1 P_i(obj)=1 Pi(obj)=1为正样本,0则是负样本。分类置信度 P i ( c l s ∣ θ ) = P i ( c l s ∣ o b j , θ ) P_i(cls|\theta)=P_i(cls|obj, \theta) Pi(cls∣θ)=Pi(cls∣obj,θ)。而在AutoAssign中, P i ( o b j ∣ θ ) P_i(obj|\theta) Pi(obj∣θ)是动态地由网络决定的。
3.3.2 联合的置信度建模
为了让每个位置的正负样本预测是公平的,除了分类,我们也应该包含定位的置信度。通常定位的输出是边框偏移量,很难直接去测算回归置信度。因此作者将定位损失 L i l o c ( θ ) L_i^{loc}(\theta) Liloc(θ)转换为概率 P i ( l o c ∣ θ ) P_i(loc|\theta) Pi(loc∣θ),然后将分类和回归概率结合起来,得到一个联合的置信度 P i ( θ ) P_i(\theta) Pi(θ)。损失 L i ( θ ) L_i(\theta) Li(θ)的推演过程如下。不失一般性,这里作者使用了二元交叉熵损失来做分类。
其中 λ \lambda λ是损失权重,平衡分类和定位。
3.3.3 加权函数
基于联合置信度 P i ( θ ) P_i(\theta) Pi(θ),作者提出了指数形式的置信度加权函数 C ( P i ) C(P_i) C(Pi),着重强调那些高置信度的位置:
C ( P i ) = e P i ( θ ) γ C(P_i) = e^{\frac{P_i(\theta)}{\gamma}} C(Pi)=eγPi(θ)
其中 γ \gamma γ是调节系数,控制高置信度位置和低置信度位置对正损失的贡献大小。
3.4 权重图
3.4.1 正权重
直觉上,给定一个物体 i i i,对于所有在该边框内的位置,我们应该关注那些正确的位置,它们的预测更准确。但是,在训练的一开始,网络的参数是随机初始化的,使它预测的置信度不合理。因此由先验分布的信息也很关键。对于位置 i ∈ S n i\in S_n i∈Sn,作者将中心点加权模块的类别具体的先验 G ( d ⃗ i ) G(\vec d_i) G(di)与置信度加权模块 C ( P i ) C(P_i) C(Pi)结合起来,产生正的权重 w i + w_i^+ wi+:
w i + = C ( P i ) G ( d ⃗ i ) ∑ j ∈ S n C ( P i ) G ( d ⃗ i ) w_i^+ = \frac{C(P_i)G(\vec d_i)}{\sum_{j\in S_n} C(P_i)G(\vec d_i)} wi+=∑j∈SnC(Pi)G(di)C(Pi)G(di)
3.4.2 负权重
如上面讨论的,一个边框通常包含一定数量的背景位置,我们也需要加权的负损失来抑制那些位置,去除假阳样本。而且,由于边框内的位置通常倾向于预测高置信度的正样本,我们需要定位置信度来产生无偏见的假阳样本。矛盾的是,负分类对于回归任务是没有梯度的,这就意味着定位置信度不应被进一步优化。因此作者使用每个位置的预测与所有物体的IOU,来产生负权重 w i − w_i^- wi−:
w i − = 1 − f ( i o u i ) w_i^- = 1-f(iou_i) wi−=1−f(ioui)
其中 f ( i o u i ) = 1 / ( 1 − i o u i ) f(iou_i) = 1/(1-iou_i) f(ioui)=1/(1−ioui), i o u i iou_i ioui表示位置 i ∈ S n i\in S_n i∈Sn与所有ground truth边框最大的IOU。为了让该权重有效,作者对 f ( i o u i ) f(iou_i) f(ioui)做了归一化,范围在 [ 0 , 1 ] [0,1] [0,1]之间。这个变换将权重的分布更加突出,保证IOU最高的位置得到的负损失为0。对于边框外的所有点, w i − w_i^- wi−都设为1,因为它们肯定是背景。
3.5 损失函数
为了产生正的和负的权重图,作者动态分配更多合适的空间位置,为每个实例自动选择正确的FPN阶段。由于权重图会作用到训练损失中去,AutoAssign 以一种可微的方式来处理标签分配问题。最终的损失函数 L ( θ ) L(\theta) L(θ)定义如下:
L ( θ ) = − ∑ n = 1 N log ( ∑ i ∈ S n w i + p i + ) − ∑ j ∈ S log ( 1 − w j − p j − ) L(\theta) = - \sum_{n=1}^N \log (\sum_{i\in S_n} w_i^+ p_i^+) - \sum_{j\in S} \log(1-w_j^- p_j^-) L(θ)=−n=1∑Nlog(i∈Sn∑wi+pi+)−j∈S∑log(1−wj−pj−)
其中 P − = P ( c l s ∣ θ ) P^- = P(cls|\theta) P−=P(cls∣θ), n n n表示 n n n个ground truth。为了确保至少有一个点能匹配到物体 n n n,作者使用所有正权重的加权和,来得到最终的正置信度。 S S S表示所有尺度上的所有位置。因此,对于边框内的一个点,我们就会用不同的权重来计算正负损失。这与所有其它的标签分配策略都不同。为了处理负样本定位不平衡的问题,作者使用了Focal Loss。
等式6、7中的正负权重级数不一样,正负损失的计算是独立的。