- 2025年中央预算内投资专项(第二批)节能降碳申报指南:方向解析、条件详解与实操攻略
卧涛西安17391873147
人工智能大数据物联网制造
核心提示:2025年中央预算内投资专项(第二批)节能降碳项目申报已进入倒计时!本文深度解析申报方向、条件、资金支持比例,并提供七大行业改造实例与申报策略,助您抢占政策红利先机。一、政策背景与申报时效2025年中央预算内投资专项(第二批)节能降碳是国家"双碳"战略落地的关键举措,旨在通过财政支持加速重点领域低碳转型。本批次申报截止日期为本月底,拟申报单位需立即启动材料准备工作。二、三大申报方向深度解
- 数据让农业更聪明——用大数据激活田间地头
Echo_Wish
大数据大数据
数据让农业更聪明——用大数据激活田间地头在农业领域,随着人口增长和气候变化的影响,如何提升生产力始终是个关键话题。大数据,这个曾经只属于科技领域的概念,如今已悄然进入田间地头。今天,我以Echo_Wish的视角,和大家聊聊大数据如何赋能农业生产力,帮农民在阳光下也能掌握“科技的钥匙”。认识农业中的大数据什么是农业中的“大数据”?简单来说,就是收集和分析有关土地、气候、作物、病虫害以及市场需求等方面
- yum install locate出现Error: Unable to find match: locate解决方案
爱编程的喵喵
Linux解决方案linuxlocateyum解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的知识进行总结与归纳,不仅形成深入且独到的理解,而且能够帮助新手快速入门。 本文主要介绍了yuminstalllocate出现
- 【CXX-Qt】2.1 构建系统
Source.Liu
CXX-Qtqtrustc++
CXX-Qt可以集成到现有的CMake项目中,也可以仅使用Cargo进行构建。需要了解的可以阅读上2篇文章:Cargo集成CMake集成CXX-Qt可以与任何C++构建系统一起使用,只要在调用Cargo之前设置了QMAKE、CXX_QT_EXPORT_DIR和CXX_QT_EXPORT_CRATE_环境变量。请查看我们的CMake代码以了解如何使用这些变量。然而,除了Cargo或CMake之外,使
- GraphCube、Spark和深度学习技术赋能快消行业关键运营环节
weixin_30777913
开发语言大数据深度学习人工智能spark
在快消品(FMCG)行业,需求计划(DemandPlanning)、库存管理(InventoryManagement)和需求供应管理(DemandSupplyManagement)是影响企业整体效率和利润水平的关键运营环节。GraphCube图多维数据集技术、Spark大数据分析处理技术和深度学习技术的结合,为这些环节提供了智能化、动态化和实时化的解决方案,显著提升业务运营效率和企业利润。一、技术
- 从 0 到 1 构建 Python 分布式爬虫,实现搜索引擎全攻略
七七知享
Pythonpython分布式爬虫搜索引擎算法程序人生网络爬虫
从0到1构建Python分布式爬虫,实现搜索引擎全攻略在大数据与信息爆炸的时代,搜索引擎已然成为人们获取信息的关键入口。你是否好奇,像百度、谷歌这般强大的搜索引擎,背后是如何精准且高效地抓取海量网页数据的?本文将带你一探究竟,以Python为工具,打造属于自己的分布式爬虫,进而搭建一个简易搜索引擎,完整呈现从底层代码编写到系统搭建的全过程。通过本文的实践,我们成功打造了Python分布式爬虫,并以
- 第三十篇 维度建模:从理论到落地的企业级实践
随缘而动,随遇而安
数据库sql数据仓库大数据数据库架构
目录一、维度建模核心理论体系1.1Kimball方法论四大支柱1.2关键概念对比矩阵二、四步建模法全流程解析2.1选择业务过程(以电商为例)2.2声明原子粒度(订单案例)2.3维度设计规范时间维度(含财年逻辑)SCDType2完整实现(Hudi)2.4事实表类型与设计三、企业级建模实战:电商用户分析3.1业务矩阵分析3.2模型实现代码四、高级建模技巧4.1多星型模式关联4.2大数据场景优化五、性能
- 【人工智能机器学习基础篇】——深入详解无监督学习之降维:PCA与t-SNE的关键概念与核心原理
猿享天开
人工智能数学基础专讲人工智能机器学习无监督学习降维
深入详解无监督学习之降维:PCA与t-SNE的关键概念与核心原理在当今数据驱动的世界中,数据维度的增多带来了计算复杂性和存储挑战,同时也可能导致模型性能下降,这一现象被称为“维度诅咒”(CurseofDimensionality)。降维作为一种重要的特征提取和数据预处理技术,旨在通过减少数据的维度,保留其主要信息,从而简化数据处理过程,并提升模型的性能。本文将深入探讨两种广泛应用于无监督学习中的降
- 顺序表以及顺序表的操作(数据结构初阶)
猫天帝
数据结构
线性表在学习顺序表之前,我们需要先了解一下什么是线性表。线性表(linearlist)是n个具有相同特性的数据元素的有限序列。线性表是一种在实际中广泛使用的数据结构,常见的线性表:顺序表、链表、栈、队列、字符串...线性表在逻辑上是线性结构,也就说是连续的一条直线。但是在物理结构上并不一定是连续的,线性表在物理上存储时,通常以数组和链式结构的形式存储。物理结构与逻辑结构:所谓物理结构,就是数据实际
- TK矩阵系统:高效管理与智能化操作平台
m0_74891046
矩阵
随着TikTok等社交媒体平台的快速发展,短视频创作和内容运营逐渐成为互联网行业的重要组成部分。为了帮助内容创作者、品牌运营商以及数据分析人员更高效地管理多个TikTok账号并优化运营策略,TK矩阵系统提供了一种全新的解决方案,结合了先进的软件技术与硬件设施,旨在简化操作流程,提高工作效率。TK矩阵系统概述TK矩阵系统是一款集成软件与硬件的综合平台,专为TikTok内容管理和数据采集设计。系统使用
- 【MyDB】6-TabelManager 字段与表管理 之2-SQL语句解析
-$_$-
Java项目sqlpython数据库
【MyDB】6-TabelManager字段与表管理之2-SQL语句解析前言SQL语法Parser类具体实现入口方法Parse(byte[]statement)事务控制parseBegin()parseCommit(),parseAbortDDL(DataDefinitionLanguage)parseCreate()parseDrop()DML语句parseSelect()parseInsert
- 一、大语言模型微调 vs. 大语言模型应用
AI Echoes
深度学习人工智能deepseek机器学习算法
一、大语言模型微调vs.大语言模型应用1.微调(Fine-Tuning)的含义与特点定义与作用微调指在预训练好(通用)的基础模型上,通过在特定领域或任务的数据集上进一步训练来调整模型参数,使其在该领域任务中获得更优表现。这种方法可以使通用模型“定制化”,更好地理解专业术语和领域知识,从而提升准确性和响应质量。例如,为医疗、法律、金融等垂直领域构建专属模型,往往需要在预训练模型基础上进行微调。特点参
- java常用数据转换
bestwinner
javapythonwindows
1.List与数组互转ArrayListlist=newArrayListlist1=Arrays.stream(array1).collect(Collectors.toList());String[]cateArray=cateList.toArray(newString[cateList.size()]);2.new集合对像importcom.google.common.collect.Li
- 编程语言选择分析:C#、Rust、Go 与 TypeScript 编译器优化
互联网搬砖老肖
工具使用原力计划c#rustgolang
编程语言选择分析:C#、Rust、Go与TypeScript编译器优化在讨论编程语言的选择时,特别是针对微软的C#和Rust,以及谷歌的Go语言,以及微软试图通过Go来拯救TypeScript编译器的问题,我们可以从多个角度来分析和理解。首先,我们来逐一分析这些语言的特点和它们各自的应用场景。1.C#C#是微软开发的一种面向对象的编程语言,它是.NET框架的核心部分。C#广泛用于Windows应用
- AI实干家:HK深度体验-【外2篇-香港“千年地契”解析之政策背景、优势与投资传承特点】
SZ0771
人工智能
香港的“千年地契”通常指999年租期的地契,这种超长租期在香港土地历史上确实存在,但在现代政策下已不常见。以下从香港土地政策、税收政策、投资价值和家庭传承角度,详细分析“千年地契”与普通租期地契的区别,并探讨太平山物业的情况。一、香港“千年地契”是什么?定义与历史背景香港的“千年地契”实际上是指999年租期的地契,而非真正的永久业权(Freehold)。在法律和实际操作中,999年租期被视为“准永
- AI界劳斯莱斯o1 -Pro来了!百万token收费600刀,OpenAI在AI普惠反方向狂奔?
算家计算
话题文章人工智能算家云OpenAIo1-proAPIOpenAI发布最贵模型DeepSeek
刚刚,OpenAI宣布推出其最新的高性能推理模型o1-pro。当大家还在为GPT-4.5的订阅费感到肉痛时,OpenAI用一记价格暴击刷新了认知——全新推理模型o1-pro的API定价,输入每百万token收费150美元,输出每百万token收费600美元,比前代模型贵了10倍,更是将DeepSeek-R1甩出270倍价差。与OpenAI其他模型相比,o1-pro的价格高出了不止一点:目前o1-p
- LeetCode热题100JS(59/100)第十一天|46|78|17|39|22
Alicesflower
LeetCode热题100JSleetcodejavascript算法
46.全排列题目链接:46.全排列难度:中等刷题状态:2刷新知识:解题过程思考示例1:输入:nums=[1,2,3]输出:[[1,2,3],[1,3,2],[2,1,3],[2,3,1],[3,1,2],[3,2,1]题解分析参考题解链接:全排列放下1刷过程/***@param{number[]}nums*@return{number[][]}*///varpermute=function(num
- 模型上下文协议 (MCP)是什么?Model Context Protocol 需要你了解一下
同学小张
学习AIGCAI-nativeagigpt开源协议
大家好,我是同学小张,+v:jasper_8017一起交流,持续学习AI大模型应用实战案例,持续分享,欢迎大家点赞+关注,订阅我的大模型专栏,共同学习和进步。在人工智能领域,ModelContextProtocol(MCP)正逐渐成为连接AI模型与各类数据源及工具的重要标准。MCP究竟为何物?它又将如何改变AI应用的开发与使用?文章目录0.概念1.MCP的总体架构2.为何使用MCP?3.我的理解4
- MCP服务器:AI智能体的新时代连接标准
真挺乐
人工智能
在AI技术的不断发展中,MCP(ModelContextProtocol,模型上下文协议)正成为AI智能体与外部系统交互的新标准。MCP的目标是提供一个统一的方法,让AI智能体能够安全、高效地访问各种数据源、API接口和系统工具,从而扩展其能力,提升智能化水平。本文将深入探讨MCP服务器的架构、优势及其在现实世界中的应用。什么是MCP服务器?MCP服务器是MCP架构中的关键组件,它们充当AI智能体
- 生成式对抗网络在人工智能艺术创作中的应用与创新研究
辛迎蕌
人工智能
摘要本文深入探究生成式对抗网络(GAN)在人工智能艺术创作领域的应用与创新。通过剖析GAN核心原理,阐述其在图像、音乐、文学等艺术创作中的实践,分析面临的挑战与创新方向,呈现GAN对艺术创作模式的变革,为理解人工智能与艺术融合发展提供全面视角。一、引言在人工智能与艺术深度融合的时代浪潮中,生成式对抗网络(GAN)作为一项突破性技术,为艺术创作带来了全新的可能性。它打破传统创作边界,以独特的对抗学习
- 知识图谱在人工智能语义理解与推理中的关键作用及发展研究
@王威&
人工智能
摘要本文聚焦知识图谱,深入剖析其在人工智能语义理解与推理中的核心作用。阐述知识图谱的构建原理、表示方法,分析其在自然语言处理、智能问答系统、推荐系统等多领域助力语义理解与推理的应用,探讨面临的挑战并展望未来发展方向,全面呈现知识图谱对人工智能发展的重要价值与深远影响。一、引言在人工智能追求更精准理解和处理人类语言与知识的进程中,知识图谱成为关键技术。它以结构化形式组织海量知识,揭示实体间复杂关系,
- 【Kafka高级】Kafka性能优化与调优实践
全栈追梦人
kafka性能优化linq
在大规模数据处理和实时消息传递场景中,Kafka的性能优化至关重要。本文将从生产者性能优化、消费者性能优化以及集群性能调优三个方面展开,结合实际代码示例和配置参数,帮助读者更好地理解和应用Kafka性能优化策略。一、生产者性能优化Kafka生产者的性能直接影响消息发送的效率和系统的吞吐量。以下是一些关键优化策略:1.1批量发送生产者会将消息批量发送到Kafka,减少网络请求次数。以下参数对批量发送
- 耦合与解耦:软件工程中的核心矛盾与破局之道
以恒1
软件工程
耦合与解耦:软件工程中的核心矛盾与破局之道在软件开发领域,耦合与解耦是贯穿始终的核心矛盾。它们如同硬币的两面,既相互对立又紧密依存。本文将从概念解析、类型分类、解耦策略到实际应用,全面剖析这对矛盾体的本质与破局之道。一、耦合的本质:依赖关系的多维透视耦合(Coupling)指软件系统中不同模块、组件或服务之间的相互依赖程度。这种依赖可能表现为数据传递、控制流交互或资源共享。根据耦合强度,可分为七种
- 领域驱动设计(DDD)与MVC架构:理念对比与架构选择
以恒1
mvc架构
领域驱动设计(DDD)与MVC架构:理念对比与架构选择一、架构之争的本质:业务复杂度驱动技术演进在软件开发领域,没有银弹式的完美架构,只有适合当前业务场景的合理选择。MVC与DDD的区别本质上是业务复杂度与架构响应能力的匹配问题。让我们通过一个真实案例展开思考:案例背景某金融科技公司初期采用MVC架构开发支付系统,随着业务扩展,新增跨境支付、分账系统、风控规则等功能后,代码库逐渐演变成"大泥球"架
- MyBatis 中 resultType 的使用详解
旧故新长
windows
MyBatis中resultType的使用详解1.resultType的含义在MyBatis中,resultType指的是每一行查询结果的Java类型,而不是整个结果集的类型。常见的用法:resultType="java.lang.String":表示每一行是一个字符串。resultType="com.example.User":表示每一行是一个User对象。2.resultType与方法返回值类
- 第二十九篇 数据仓库与商务智能:技术演进与前沿趋势深度解析
随缘而动,随遇而安
数据库数据仓库大数据数据库架构数据库开发
声明:文章内容仅供参考,需仔细甄别。文中技术名称属相关方商标,仅作技术描述;代码示例为交流学习用途,部分参考开源文档(Apache2.0/GPLv3);案例数据已脱敏,技术推荐保持中立;法规解读仅供参考,请以《网络安全法》《数据安全法》官方解释为准。目录一、核心差异:技术定位与实现路径1.1核心能力矩阵二、协同关系:现代数据供应链的双引擎2.1数据价值链协同2.2典型技术栈集成三、前沿技术动态(2
- AI实干家:HK深度体验-【第3篇-香港、新加坡、深圳、上海、首尔五座城市在金融数据维度的对比分析】
SZ0771
人工智能大数据
以下是香港、新加坡、深圳、上海、首尔五座城市在金融数据维度的对比分析,涵盖货币流通量、存货款规模、资本市场活跃度、国际贸易、外资及外汇储备等关键指标,结合最新公开数据及全球金融中心排名动态:一、货币流通量(M0-M1-M2)由于城市层面货币供应量(M0、M1、M2)数据通常由国家统一统计,以下以金融机构本外币存款余额(反映广义货币M2的存量规模)为主要参考:城市本外币存款余额(2024年末)增速(
- 为什么在Linux系统中,available会比free+buff/cache的总和少很多
fzip
Linuxlinux运维服务器
在Linux系统中,available内存值小于free+buff/cache总和的现象源于内存管理的复杂机制。以下是核心原因及技术细节:一、背景1.现象#1.free-htotalusedfreesharedbuff/cacheavailableMem:503Gi475Gi8.9Gi605Mi18Gi13GiSwap:63Gi12Gi51Gi#2.grep-E'^(MemTotal|MemFre
- CPO光电共封装关键技术与Top玩家代表作
CoderIsArt
光学CPO
CPO(Co-PackagedOptics,光电共封装)关键技术介绍CPO(Co-PackagedOptics)是一种将光学器件与电子芯片(如ASIC、CPU、GPU等)封装在同一基板上的技术。它旨在解决传统可插拔光模块在高密度、高带宽场景下的功耗、散热和信号完整性问题。CPO通过缩短电信号的传输距离,减少信号衰减和功耗,同时提高系统的整体性能和能效。CPO技术主要应用于数据中心、高性能计算(HP
- 使用Nginx实现后端负载均衡
海上彼尚
node.jsnginx负载均衡运维node.js
目录引言一、负载均衡的核心作用二、基础配置三步曲1.定义后端服务器组(upstream)2.配置代理转发规则3.重载配置生效三、六大负载均衡算法详解四、高级配置技巧1.健康检查机制2.会话保持方案3.SSL终止优化五、实战场景配置案例案例1:WebSocket负载均衡案例2:多级地域分发案例3:连接池优化六、最佳实践与陷阱规避结语引言在现代高并发场景下,单一服务器难以支撑海量请求的处理。Nginx
- Hadoop(一)
朱辉辉33
hadooplinux
今天在诺基亚第一天开始培训大数据,因为之前没接触过Linux,所以这次一起学了,任务量还是蛮大的。
首先下载安装了Xshell软件,然后公司给了账号密码连接上了河南郑州那边的服务器,接下来开始按照给的资料学习,全英文的,头也不讲解,说锻炼我们的学习能力,然后就开始跌跌撞撞的自学。这里写部分已经运行成功的代码吧.
在hdfs下,运行hadoop fs -mkdir /u
- maven An error occurred while filtering resources
blackproof
maven报错
转:http://stackoverflow.com/questions/18145774/eclipse-an-error-occurred-while-filtering-resources
maven报错:
maven An error occurred while filtering resources
Maven -> Update Proje
- jdk常用故障排查命令
daysinsun
jvm
linux下常见定位命令:
1、jps 输出Java进程
-q 只输出进程ID的名称,省略主类的名称;
-m 输出进程启动时传递给main函数的参数;
&nb
- java 位移运算与乘法运算
周凡杨
java位移运算乘法
对于 JAVA 编程中,适当的采用位移运算,会减少代码的运行时间,提高项目的运行效率。这个可以从一道面试题说起:
问题:
用最有效率的方法算出2 乘以8 等於几?”
答案:2 << 3
由此就引发了我的思考,为什么位移运算会比乘法运算更快呢?其实简单的想想,计算机的内存是用由 0 和 1 组成的二
- java中的枚举(enmu)
g21121
java
从jdk1.5开始,java增加了enum(枚举)这个类型,但是大家在平时运用中还是比较少用到枚举的,而且很多人和我一样对枚举一知半解,下面就跟大家一起学习下enmu枚举。先看一个最简单的枚举类型,一个返回类型的枚举:
public enum ResultType {
/**
* 成功
*/
SUCCESS,
/**
* 失败
*/
FAIL,
- MQ初级学习
510888780
activemq
1.下载ActiveMQ
去官方网站下载:http://activemq.apache.org/
2.运行ActiveMQ
解压缩apache-activemq-5.9.0-bin.zip到C盘,然后双击apache-activemq-5.9.0-\bin\activemq-admin.bat运行ActiveMQ程序。
启动ActiveMQ以后,登陆:http://localhos
- Spring_Transactional_Propagation
布衣凌宇
springtransactional
//事务传播属性
@Transactional(propagation=Propagation.REQUIRED)//如果有事务,那么加入事务,没有的话新创建一个
@Transactional(propagation=Propagation.NOT_SUPPORTED)//这个方法不开启事务
@Transactional(propagation=Propagation.REQUIREDS_N
- 我的spring学习笔记12-idref与ref的区别
aijuans
spring
idref用来将容器内其他bean的id传给<constructor-arg>/<property>元素,同时提供错误验证功能。例如:
<bean id ="theTargetBean" class="..." />
<bean id ="theClientBean" class=&quo
- Jqplot之折线图
antlove
jsjqueryWebtimeseriesjqplot
timeseriesChart.html
<script type="text/javascript" src="jslib/jquery.min.js"></script>
<script type="text/javascript" src="jslib/excanvas.min.js&
- JDBC中事务处理应用
百合不是茶
javaJDBC编程事务控制语句
解释事务的概念; 事务控制是sql语句中的核心之一;事务控制的作用就是保证数据的正常执行与异常之后可以恢复
事务常用命令:
Commit提交
- [转]ConcurrentHashMap Collections.synchronizedMap和Hashtable讨论
bijian1013
java多线程线程安全HashMap
在Java类库中出现的第一个关联的集合类是Hashtable,它是JDK1.0的一部分。 Hashtable提供了一种易于使用的、线程安全的、关联的map功能,这当然也是方便的。然而,线程安全性是凭代价换来的――Hashtable的所有方法都是同步的。此时,无竞争的同步会导致可观的性能代价。Hashtable的后继者HashMap是作为JDK1.2中的集合框架的一部分出现的,它通过提供一个不同步的
- ng-if与ng-show、ng-hide指令的区别和注意事项
bijian1013
JavaScriptAngularJS
angularJS中的ng-show、ng-hide、ng-if指令都可以用来控制dom元素的显示或隐藏。ng-show和ng-hide根据所给表达式的值来显示或隐藏HTML元素。当赋值给ng-show指令的值为false时元素会被隐藏,值为true时元素会显示。ng-hide功能类似,使用方式相反。元素的显示或
- 【持久化框架MyBatis3七】MyBatis3定义typeHandler
bit1129
TypeHandler
什么是typeHandler?
typeHandler用于将某个类型的数据映射到表的某一列上,以完成MyBatis列跟某个属性的映射
内置typeHandler
MyBatis内置了很多typeHandler,这写typeHandler通过org.apache.ibatis.type.TypeHandlerRegistry进行注册,比如对于日期型数据的typeHandler,
- 上传下载文件rz,sz命令
bitcarter
linux命令rz
刚开始使用rz上传和sz下载命令:
因为我们是通过secureCRT终端工具进行使用的所以会有上传下载这样的需求:
我遇到的问题:
sz下载A文件10M左右,没有问题
但是将这个文件A再传到另一天服务器上时就出现传不上去,甚至出现乱码,死掉现象,具体问题
解决方法:
上传命令改为;rz -ybe
下载命令改为:sz -be filename
如果还是有问题:
那就是文
- 通过ngx-lua来统计nginx上的虚拟主机性能数据
ronin47
ngx-lua 统计 解禁ip
介绍
以前我们为nginx做统计,都是通过对日志的分析来完成.比较麻烦,现在基于ngx_lua插件,开发了实时统计站点状态的脚本,解放生产力.项目主页: https://github.com/skyeydemon/ngx-lua-stats 功能
支持分不同虚拟主机统计, 同一个虚拟主机下可以分不同的location统计.
可以统计与query-times request-time
- java-68-把数组排成最小的数。一个正整数数组,将它们连接起来排成一个数,输出能排出的所有数字中最小的。例如输入数组{32, 321},则输出32132
bylijinnan
java
import java.util.Arrays;
import java.util.Comparator;
public class MinNumFromIntArray {
/**
* Q68输入一个正整数数组,将它们连接起来排成一个数,输出能排出的所有数字中最小的一个。
* 例如输入数组{32, 321},则输出这两个能排成的最小数字32132。请给出解决问题
- Oracle基本操作
ccii
Oracle SQL总结Oracle SQL语法Oracle基本操作Oracle SQL
一、表操作
1. 常用数据类型
NUMBER(p,s):可变长度的数字。p表示整数加小数的最大位数,s为最大小数位数。支持最大精度为38位
NVARCHAR2(size):变长字符串,最大长度为4000字节(以字符数为单位)
VARCHAR2(size):变长字符串,最大长度为4000字节(以字节数为单位)
CHAR(size):定长字符串,最大长度为2000字节,最小为1字节,默认
- [强人工智能]实现强人工智能的路线图
comsci
人工智能
1:创建一个用于记录拓扑网络连接的矩阵数据表
2:自动构造或者人工复制一个包含10万个连接(1000*1000)的流程图
3:将这个流程图导入到矩阵数据表中
4:在矩阵的每个有意义的节点中嵌入一段简单的
- 给Tomcat,Apache配置gzip压缩(HTTP压缩)功能
cwqcwqmax9
apache
背景:
HTTP 压缩可以大大提高浏览网站的速度,它的原理是,在客户端请求网页后,从服务器端将网页文件压缩,再下载到客户端,由客户端的浏览器负责解压缩并浏览。相对于普通的浏览过程HTML ,CSS,Javascript , Text ,它可以节省40%左右的流量。更为重要的是,它可以对动态生成的,包括CGI、PHP , JSP , ASP , Servlet,SHTML等输出的网页也能进行压缩,
- SpringMVC and Struts2
dashuaifu
struts2springMVC
SpringMVC VS Struts2
1:
spring3开发效率高于struts
2:
spring3 mvc可以认为已经100%零配置
3:
struts2是类级别的拦截, 一个类对应一个request上下文,
springmvc是方法级别的拦截,一个方法对应一个request上下文,而方法同时又跟一个url对应
所以说从架构本身上 spring3 mvc就容易实现r
- windows常用命令行命令
dcj3sjt126com
windowscmdcommand
在windows系统中,点击开始-运行,可以直接输入命令行,快速打开一些原本需要多次点击图标才能打开的界面,如常用的输入cmd打开dos命令行,输入taskmgr打开任务管理器。此处列出了网上搜集到的一些常用命令。winver 检查windows版本 wmimgmt.msc 打开windows管理体系结构(wmi) wupdmgr windows更新程序 wscrip
- 再看知名应用背后的第三方开源项目
dcj3sjt126com
ios
知名应用程序的设计和技术一直都是开发者需要学习的,同样这些应用所使用的开源框架也是不可忽视的一部分。此前《
iOS第三方开源库的吐槽和备忘》中作者ibireme列举了国内多款知名应用所使用的开源框架,并对其中一些框架进行了分析,同样国外开发者
@iOSCowboy也在博客中给我们列出了国外多款知名应用使用的开源框架。另外txx's blog中详细介绍了
Facebook Paper使用的第三
- Objective-c单例模式的正确写法
jsntghf
单例iosiPhone
一般情况下,可能我们写的单例模式是这样的:
#import <Foundation/Foundation.h>
@interface Downloader : NSObject
+ (instancetype)sharedDownloader;
@end
#import "Downloader.h"
@implementation
- jquery easyui datagrid 加载成功,选中某一行
hae
jqueryeasyuidatagrid数据加载
1.首先你需要设置datagrid的onLoadSuccess
$(
'#dg'
).datagrid({onLoadSuccess :
function
(data){
$(
'#dg'
).datagrid(
'selectRow'
,3);
}});
2.onL
- jQuery用户数字打分评价效果
ini
JavaScripthtmljqueryWebcss
效果体验:http://hovertree.com/texiao/jquery/5.htmHTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<title>jQuery用户数字打分评分代码 - HoverTree</
- mybatis的paramType
kerryg
DAOsql
MyBatis传多个参数:
1、采用#{0},#{1}获得参数:
Dao层函数方法:
public User selectUser(String name,String area);
对应的Mapper.xml
<select id="selectUser" result
- centos 7安装mysql5.5
MrLee23
centos
首先centos7 已经不支持mysql,因为收费了你懂得,所以内部集成了mariadb,而安装mysql的话会和mariadb的文件冲突,所以需要先卸载掉mariadb,以下为卸载mariadb,安装mysql的步骤。
#列出所有被安装的rpm package rpm -qa | grep mariadb
#卸载
rpm -e mariadb-libs-5.
- 利用thrift来实现消息群发
qifeifei
thrift
Thrift项目一般用来做内部项目接偶用的,还有能跨不同语言的功能,非常方便,一般前端系统和后台server线上都是3个节点,然后前端通过获取client来访问后台server,那么如果是多太server,就是有一个负载均衡的方法,然后最后访问其中一个节点。那么换个思路,能不能发送给所有节点的server呢,如果能就
- 实现一个sizeof获取Java对象大小
teasp
javaHotSpot内存对象大小sizeof
由于Java的设计者不想让程序员管理和了解内存的使用,我们想要知道一个对象在内存中的大小变得比较困难了。本文提供了可以获取对象的大小的方法,但是由于各个虚拟机在内存使用上可能存在不同,因此该方法不能在各虚拟机上都适用,而是仅在hotspot 32位虚拟机上,或者其它内存管理方式与hotspot 32位虚拟机相同的虚拟机上 适用。
- SVN错误及处理
xiangqian0505
SVN提交文件时服务器强行关闭
在SVN服务控制台打开资源库“SVN无法读取current” ---摘自网络 写道 SVN无法读取current修复方法 Can't read file : End of file found
文件:repository/db/txn_current、repository/db/current
其中current记录当前最新版本号,txn_current记录版本库中版本
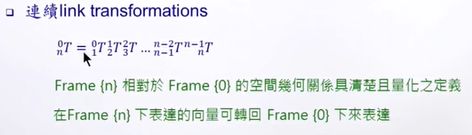
 到机体坐标系
到机体坐标系 下的变换矩阵;
下的变换矩阵;