Arduino 智能机器人 按指令行走
工具
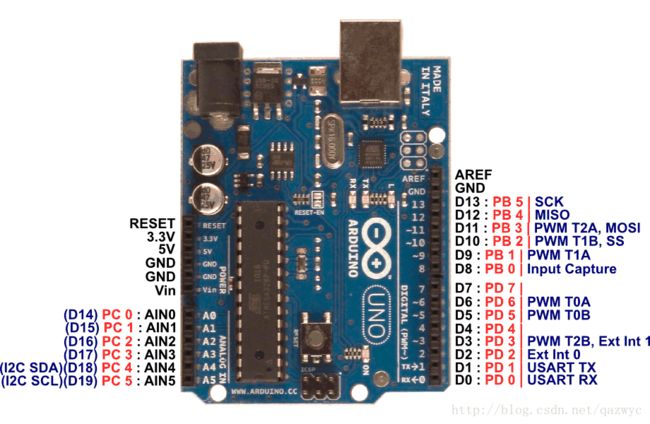
主控:Arduino UNO
直流电机驱动模块

小车配置:四个直流电机控制左右各两个轮子
夹取物体:两个舵机

供电:2节5号电池
环境
软件: Arduino 1.8.1
环境: Processing/Wiring
语言:Arduino语言是一种建立在C/C++之上的语言,但是也只是基础的C语言,Arduino只是将很多参数设置都函数化了,使用起来更加方便
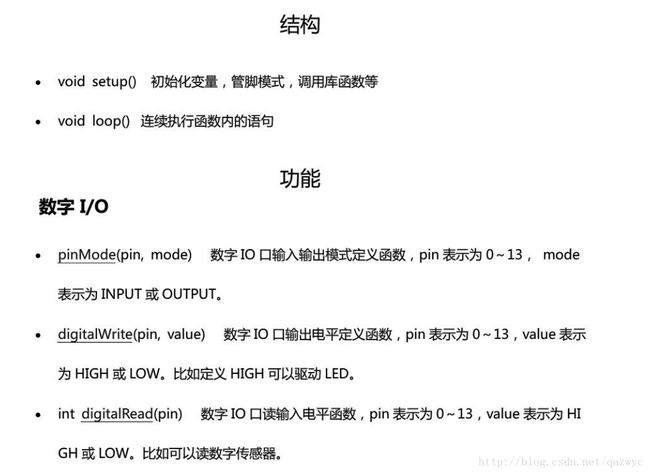
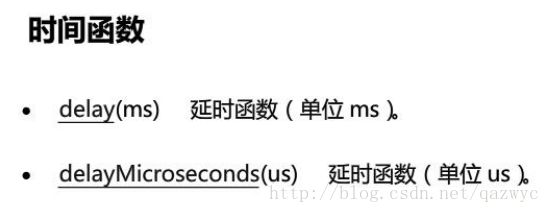
提供的基本函数:
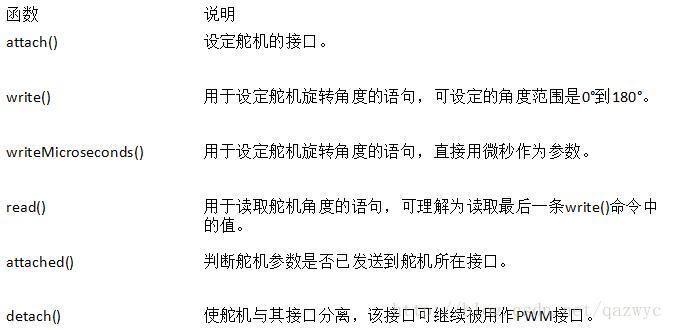
舵机模块Servo.h:
代码
#include