python+opencv实现照相机模型以及增强现实
一、在图片上实现3D图片投影
(一)相机投影模型
(1)针孔相机模型
首先定义坐标系:
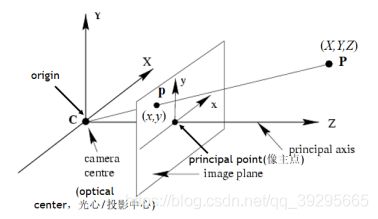
(1)相机坐标系(三维)
在这个坐标系中,相机的中心为光心,以光心c为原点和坐标轴X,Y,Z组成了相机坐标系
(2)图片坐标系(二维)
在一个图像平面中,以平面的中心像主点P为原点和坐标轴x,y组成了图片坐标系。
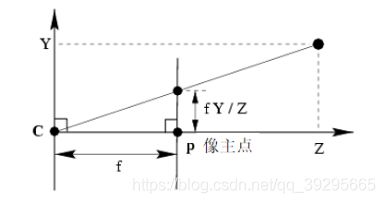
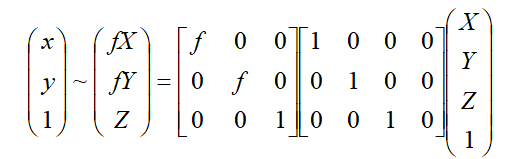
这两个坐标系之间的线性变化为:
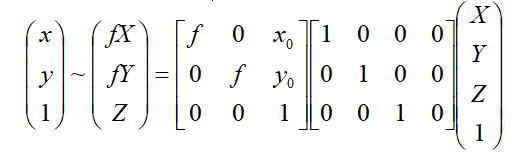
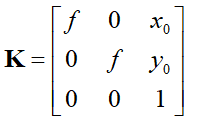
(2)内参数
内参数是指相机内部自带的,不受外界影响的参数,主要有焦距f和相机自带的误差
内参矩阵:
(3)外参数
主要是旋转、平移带来的参数变化
![]()
两类参数的联系

二、以平面和标记物进行姿态估计
(1)在一幅图像上叠加一个立方体
基本流程:
1.提取两幅图像的sift特征
2.用RANSAC算法估计单应性矩阵
3.在图像中投影成3D模型
前两个问题在之前的博客中都有详细的过程SIFT详解 RANSAC算法
现在重点解决第三个问题
原图如下:

代码参考《Python计算机视觉》
from pylab import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
"""
This is the augmented reality and pose estimation cube example from Section 4.3.
"""
import os
root=os.getcwd()+"\\"
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
# compute features
sift.process_image(root+'../data/book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image(root+'../data/book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
# camera calibration
K = my_calibration((747, 1000))
# 3D points at plane z=0 with sides of length 0.2
box = cube_points([0, 0, 0.1], 0.1)
# project bottom square in first image
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
# first points are the bottom square
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
# use H to transfer points to the second image
box_trans = homography.normalize(dot(H, box_cam1))
# compute second camera matrix from cam1 and H
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
# project with the second camera
box_cam2 = cam2.project(homography.make_homog(box))
# plotting
im0 = array(Image.open('../data/book_frontal.JPG'))
im1 = array(Image.open('../data/book_perspective.JPG'))
figure()
imshow(im0)
plot(box_cam1[0, :], box_cam1[1, :], linewidth=3)
title('2D projection of bottom square')
axis('off')
figure()
imshow(im1)
plot(box_trans[0, :], box_trans[1, :], linewidth=3)
title('2D projection transfered with H')
axis('off')
figure()
imshow(im1)
plot(box_cam2[0, :], box_cam2[1, :], linewidth=3)
title('3D points projected in second image')
axis('off')
show()
实验结果:



从运行结果看出,在书的这个平面上建立了一个正方体。
在这个代码中,使用不同的图片时,分辨率和焦距要做响应的修改
分辨率:
K = my_calibration((747, 1000))
焦距
fx = 2555 * col / 2592
fy = 2586 * row / 1936
三、增强现实
(一)PyOpenGL
一开始安装的时候我是在命令行直接输入pip install pyopengl。然后运行代码遇到了这样的错误
![]()
这是因为使用这种方法安装的是32位的版本。所以我们需要自行下载64位的pyOPengl
安装步骤:
(1)进入官网https://www.lfd.uci.edu/~gohlke/pythonlibs/#pyopengl 下载与自己电脑以及python像匹配的版本
如何查看python版本呢
打开命令行,输入python
![]()
(2)下载完成后,在命令行输入pip install +存放路径.whl
(3)运行,即可出现结果
(二)安装后,遇到的问题
在安装好pyopengl和pygame后,运行代码,出现了这样的错误
![]()
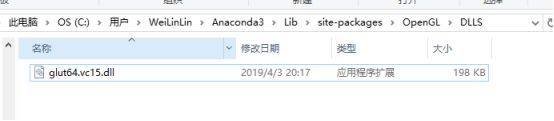
这是因为是freeglut和glut共存的缘故,它们俩定义了相同的方法,这个是动态链接库的重叠问题,我的电脑在C:\Users\WeiLinLin\Anaconda3\Lib\site-packages\OpenGL\DLLS文件夹里面。
将里面的文件删除剩下glut64.vc15.dll就可以了
(3)代码
import math
import pickle
from pylab import *
from OpenGL.GL import *
from OpenGL.GLU import *
from OpenGL.GLUT import *
from OpenGL.raw.GLUT import *
import pygame, pygame.image
from pygame.locals import *
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
import os
root=os.getcwd()+"\\"
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
def set_projection_from_camera(K):
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0, 0]
fy = K[1, 1]
fovy = 2 * math.atan(0.5 * height / fy) * 180 / math.pi
aspect = (width * fy) / (height * fx)
near = 0.1
far = 100.0
gluPerspective(fovy, aspect, near, far)
glViewport(0, 0, width, height)
def set_modelview_from_camera(Rt):
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1, 0, 0], [0, 0, -1], [0, 1, 0]])
R = Rt[:, :3]
U, S, V = np.linalg.svd(R)
R = np.dot(U, V)
R[0, :] = -R[0, :]
t = Rt[:, 3]
M = np.eye(4)
M[:3, :3] = np.dot(R, Rx)
M[:3, 3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
def draw_background(imname):
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image, "RGBX", 1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D, glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, width, height, 0, GL_RGBA, GL_UNSIGNED_BYTE, bg_data)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0, 0.0);
glVertex3f(-1.0, -1.0, -1.0)
glTexCoord2f(1.0, 0.0);
glVertex3f(1.0, -1.0, -1.0)
glTexCoord2f(1.0, 1.0);
glVertex3f(1.0, 1.0, -1.0)
glTexCoord2f(0.0, 1.0);
glVertex3f(-1.0, 1.0, -1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT, GL_AMBIENT, [0, 0, 0, 0])
glMaterialfv(GL_FRONT, GL_DIFFUSE, [0.5, 0.0, 0.0, 0.0])
glMaterialfv(GL_FRONT, GL_SPECULAR, [0.7, 0.6, 0.6, 0.0])
glMaterialf(GL_FRONT, GL_SHININESS, 0.25 * 128.0)
glutSolidTeapot(size)
width, height = 1000, 747
def setup():
pygame.init()
pygame.display.set_mode((width, height), OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")
# compute features
sift.process_image(root+'../data/book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image(root+'../data/book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
K = my_calibration((747, 1000))
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
box = cube_points([0, 0, 0.1], 0.1)
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
box_trans = homography.normalize(dot(H, box_cam1))
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
Rt = dot(linalg.inv(K), cam2.P)
setup()
draw_background("../data/book_perspective.bmp")
set_projection_from_camera(K)
set_modelview_from_camera(Rt)
draw_teapot(0.05)
pygame.display.flip()
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit()
(4)运行结果
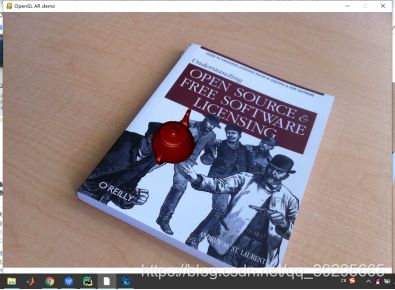
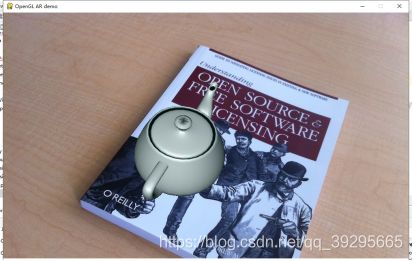
茶壶和立方体的前两步是一样的,只是最后一步投影到图像上的不是一个立方体,而是一个茶壶。此时要对茶壶进行基础的设置,如大小、颜色、表面纹理等。
下一篇将介绍一下视频增强的方法