FSSIM仿真环境的雷达和摄像头
文章目录
- 寻找切入口
- 探索
- 雷达
- 摄像头
- 下一篇
寻找切入口
运行fssim
roslaunch fssim auto_fssim.launch
终端输入
rqt_graph
终端输入
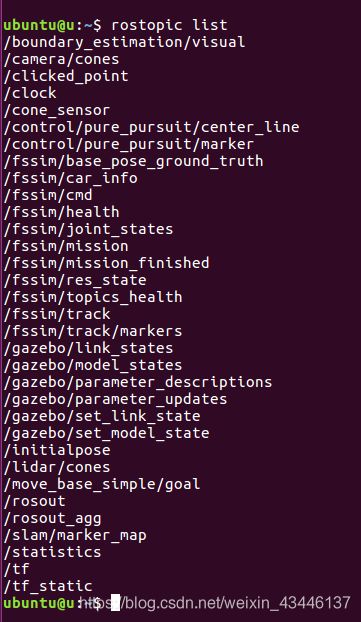
rostopic list
终端输入
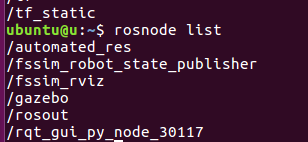
rosnode list
终端输入
rosservice list
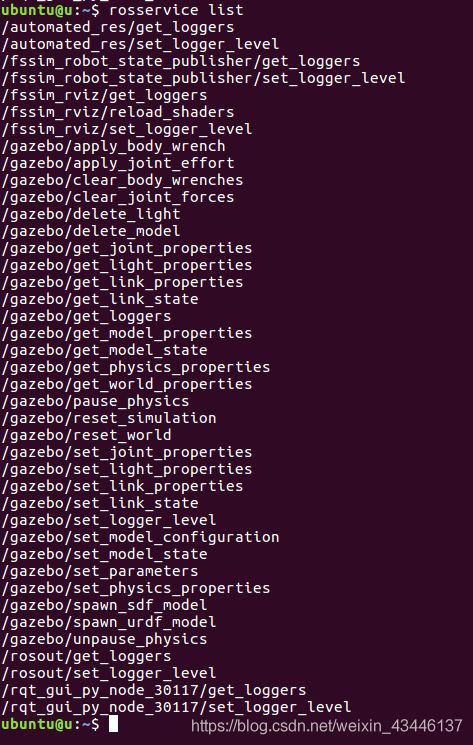
终端输入
rosmsg list
还有一些线索可能在源码中,接下来开始探索
探索
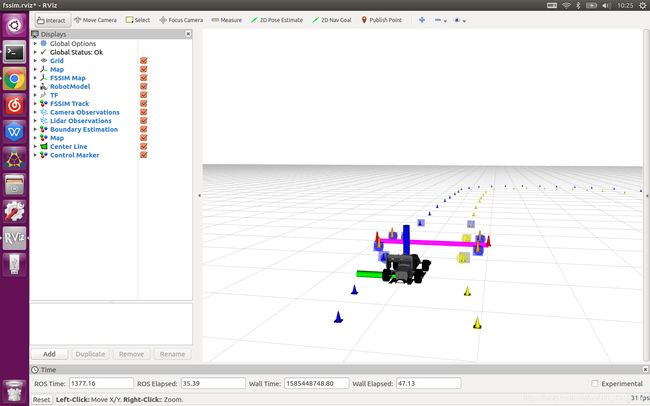
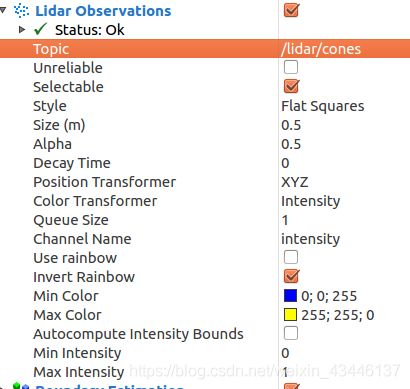
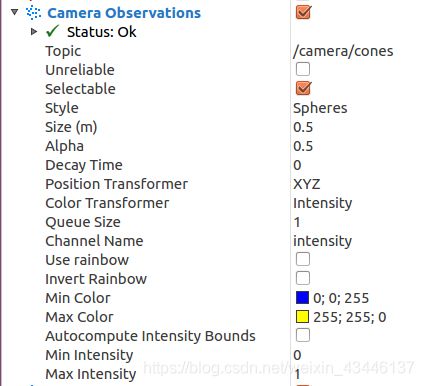
打开fssim,查看左侧信息栏

发现有雷达和摄像头的信息,本质上fssim是利用rviz进行仿真,rviz是根据各种各样的信息来进行可视化的,从左侧应该能找到线索
雷达
先看雷达
发现是一个叫 /lidar/cones的话题
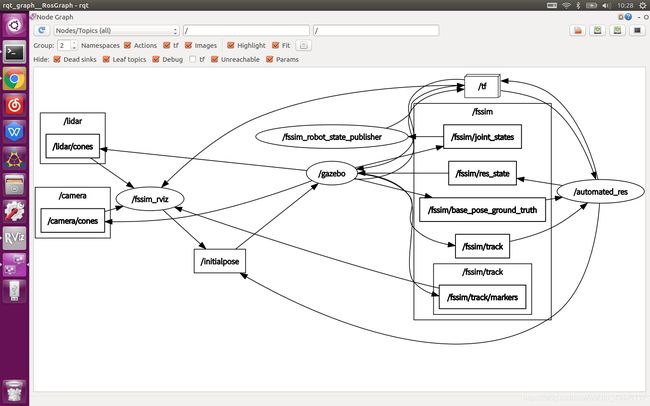
在rqt_graph中可以看见如下图:
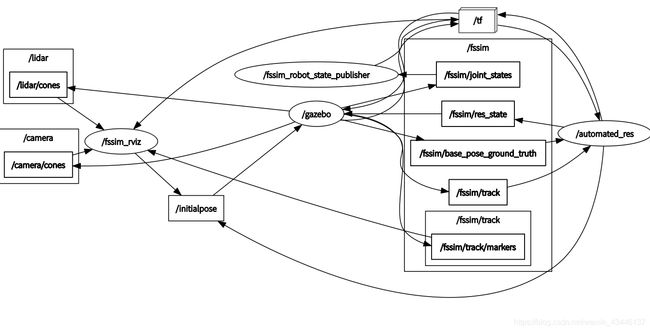
rviz订阅 /lidar/cones 和 /camera/cones,gazebo向这两个话题发送信息。这就可以解释为啥刚开始学习fssim的时候为啥启动gazebo没有反映了,因为gazebo也被fssim集成了。
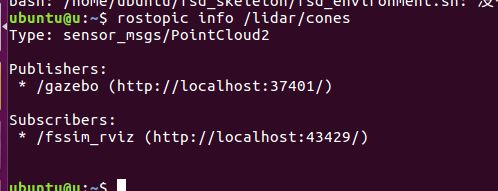
那么是否我们也可以订阅 /lidar/cones 呢?看一下这个话题都有些什么
rostopic info /lidar/cones
看一下名为 sensor_msgs/PointCloud2 的msg
rosmsg show sensor_msgs/PointCloud2

。。。。当场死亡,这是啥。。。。
等雷达方面的朋友看看再说吧,雷达到这里就结束了。
摄像头
方法和雷达类似
rostopic info /camera/cones
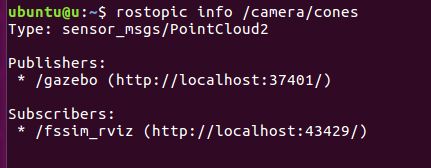
几乎和雷达一样,再看msg都是一样的点云数据
所以fssim应该是直接给了锥桶信息,在仿真环境中不需要在进行雷达和摄像头上的一些复杂的取锥桶的操作,这对路径规划和控制是好消息,但是对感知不是,因为没有办法在fssim上面仿真感知的算法效果,或许还有其他办法,再深入研究研究再说吧。
下一篇
既然锥桶信息有了,只要我们在代码中订阅这个话题应该就可以实现使用锥桶信息规划路线了,下一篇订阅这两个话题,并且该清楚点云msg的含义