各类平衡树的学习(一)——Splay
一.一道模板题.
题目:BZOJ3224.
题目大意:在序列上维护一个数据结构支持:
1.插入数 x x x.
2.删除数 x x x(只删一个).
3.查找 x x x的最小排名.
4.查找排名为 x x x的数.
5.查找 x x x的前驱.
6.查找 x x x的后继.
1 ≤ n ≤ 1 0 5 1\leq n\leq 10^5 1≤n≤105.
虽然在《各类平衡树的学习(零)——二叉搜索树BST》(建议先去看看)中我们用二叉搜索树来做了下这道题,但这种裸题一般都会卡掉一般的二叉搜索树,所以我们现在需要用到平衡树来维护.
平衡树就是利用一些机制,使得每一次的操作效率是 O ( log n ) O(\log n) O(logn)或者是均摊 O ( log n ) O(\log n) O(logn)的二叉查找树,常见的平衡树有Treap、Splay、Red-Black Tree、替罪羊树、Size-Balanced Tree、AVL、Leafy Tree等.
在上述的常见的平衡树中,Splay和Treap在OI中较为常用,且功能强大,这里我们就来介绍一下Splay实现各类操作.
二.splay维护的信息与建树.
splay树只需要在普通BST的基础上多存一个父亲指针 f a fa fa,而且建树与普通BST一模一样,下面直接给出代码:
struct tree{
int x,fa,s[2],siz,cnt;
}tr[N+9];
int cn,rot;
void Pushup(int k){tr[k].siz=tr[tr[k].s[0]].siz+tr[tr[k].s[1]].siz+tr[k].cnt;}
int New_node(int x,int fa){
tr[++cn]=tree();
tr[cn].x=x;tr[cn].siz=tr[cn].cnt=1;
tr[cn].fa=fa;if (fa) tr[fa].s[x>tr[fa].x]=cn;
return cn;
}
void Build(){cn=0;rot=New_node(-INF,0);New_node(INF,1);Pushup(1);}
三.旋转操作Rotate.
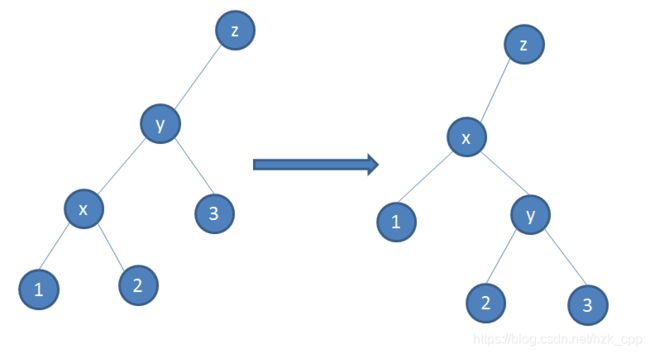
旋转是指把两个节点 x x x和 x x x的父亲 y y y的父子关系改变,即让 x x x成为 y y y,且不破坏原树的二叉查找树性质.
这个过程可以用下面的图来表示:
那么我们来设计这个旋转函数吧!
首先我们考虑它们在旋转前的关系, t r [ x ] . f a = y , t r [ y ] . f a = z tr[x].fa=y,tr[y].fa=z tr[x].fa=y,tr[y].fa=z.深入探究它们的关系,设 k = t r [ y ] . s [ 1 ] = = x k=tr[y].s[1]==x k=tr[y].s[1]==x,即 t r [ y ] . s [ k ] = x tr[y].s[k]=x tr[y].s[k]=x,那么 t r [ x ] . s [ k ] = 1 , t r [ x ] . s [ k x o r 1 ] = 2 , t r [ y ] . s [ k x o r 1 ] = 3 tr[x].s[k]=1,tr[x].s[k\,\,xor\,\,1]=2,tr[y].s[k\,\,xor\,\,1]=3 tr[x].s[k]=1,tr[x].s[kxor1]=2,tr[y].s[kxor1]=3.
考虑把它们旋转后的关系,发生改变的只有 t r [ z ] . s [ t r [ z ] . s [ 1 ] = = y ] = x , t r [ y ] . s [ k ] = 2 , t r [ x ] . s [ k x o r 1 ] = x tr[z].s[tr[z].s[1]==y]=x,tr[y].s[k]=2,tr[x].s[k\,\,xor\,\,1]=x tr[z].s[tr[z].s[1]==y]=x,tr[y].s[k]=2,tr[x].s[kxor1]=x,所以我们可以写出这样的代码:
void Rotate(int x){
int y=tr[x].fa,z=tr[y].fa,k=tr[y].s[1]==x;
if (z) tr[z].s[tr[z].s[1]==y]=x;tr[x].fa=z;
tr[y].s[k]=tr[x].s[k^1];if (tr[x].s[k^1]) tr[tr[x].s[k^1]].fa=y;
tr[x].s[k^1]=y;tr[y].fa=x;
Pushup(y);Pushup(x);
}
当然也有一种写法是把Roatate操作分为左旋( x < y x
四.伸展操作Splay.
Splay操作是splay的核心,它的功能是在不改变树的中序遍历的情况下,把某个节点移到目标节点(通常是根或根的某个儿子)儿子的位置.
具体实现很简单,因为目标节点通常为根或根的儿子,所以只需要把 x x x节点不断往上旋转直到 x x x成为了指定节点的儿子.
具体代码如下:
void Splay(int x,int go){
for (;tr[x].fa^go;Rotate(x));
if (!go) rot=x;
Pushup(x); //一定要Pushup
}
但是这样的Splay有可能会TLE,这是因为没有时间复杂度保证,它可以被这样一种数据卡掉:
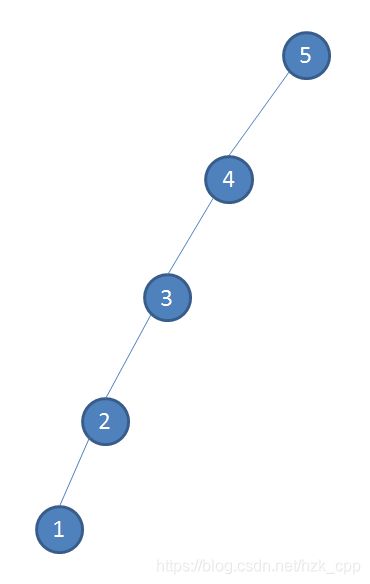
这个时候我们只需要不断查询 1 , 5 , 1 , 5 , 1 , 5 , . . . 1,5,1,5,1,5,... 1,5,1,5,1,5,...就可以让时间复杂度退化成一次查询 O ( n ) O(n) O(n).
那么我们该如何让时间复杂度变得有保证呢?考虑两种情况:
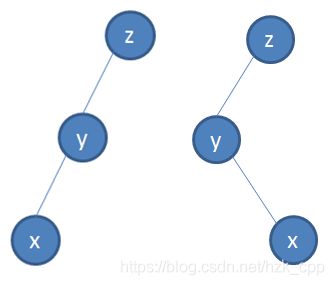
第一种情况时, x , y x,y x,y和 y , z y,z y,z的父子关系相同,那么我们就先旋转 y y y,再旋转 x x x;而第二种情况时, x , y x,y x,y和 y , z y,z y,z的父子关系不同,就直接两次旋转 x x x即可.
代码如下:
void Splay(int x,int go){
int y,z;
while (tr[x].fa^go){
y=tr[x].fa;z=tr[y].fa;
if (z) tr[y].s[0]==x^tr[z].s[0]==y?Rotate(x):Rotate(y);
Rotate(x);
}
if (!go) rot=x;
Pushup(x); //一定要Pushup
}
然后我们就能保证一次操作时间复杂度为 O ( log n ) O(\log n) O(logn)啦!至于证明在最后…
五.一些与BST差别不大的操作.
splay上所有操作的实现可以写成与BST一模一样,但是为了保证平衡,对于我们使用过的所有从根到一个节点 k k k的链都需要 S p l a y ( k , 0 ) Splay(k,0) Splay(k,0)以保证复杂度.
由于查询前驱后继与删除的代码可以通过splay这个操作写的更加简洁,所以这里先奉上其它几个操作的代码:
int Find_val(int x){
int k=rot,fa=0;
for (;k&&tr[k].x^x;fa=k,k=tr[k].s[x>tr[k].x]);
Splay(k?k:fa,0);
return k?k:-1;
}
int Insert(int x){
int k=rot,fa=0;
for (;k&&tr[k].x^x;fa=k,k=tr[k].s[x>tr[k].x]);
k?++tr[k].cnt:k=New_node(x,fa);
Splay(k,0);
return k;
}
int Query_rank(int x){
int res=0,k=rot,fa=0;
for (;k&&tr[k].x^x;fa=k,k=tr[k].s[x>tr[k].x])
if (x>tr[k].x) res+=tr[k].cnt+tr[tr[k].s[0]].siz;
if (k) res+=tr[tr[k].s[0]].siz;
Splay(k?k:fa,0);
return res;
}
int Find_rank(int p){
++p;
int k=rot;
while (2333)
if (p>tr[tr[k].s[0]].siz+tr[k].cnt) p-=tr[tr[k].s[0]].siz+tr[k].cnt,k=tr[k].s[1];
else if (p<=tr[tr[k].s[0]].siz) k=tr[k].s[0];
else break;
Splay(k,0);
return k;
}
六.简化前驱与后继的代码.
我们发现若直接用写BST的方式写有些长,考虑是否可以利用splay的先天优势来简化代码呢?
考虑一下上一块中 F i n d _ v a l ( x ) Find\_val(x) Find_val(x)的作用,若 x x x存在,很明显 x x x会被提到根,并且 x x x的前驱和后继只需要一个简单的迭代就可以实现了;若 x x x不存在,则被提到根的节点有可能是 x x x的前驱或后继,这个时候我们需要判定一下是前驱还是后继,另外一个也可以通过简单的迭代实现了.
代码如下:
int Lower(int x){
Find_val(x);
int k=rot;
if (tr[k].x<x) return k;
for (k=tr[k].s[0];tr[k].s[1];k=tr[k].s[1]);
Splay(k,0);
return k;
}
int Upper(int x){
Find_val(x);
int k=rot;
if (tr[k].x>x) return k;
for (k=tr[k].s[1];tr[k].s[0];k=tr[k].s[0]);
Splay(k,0);
return k;
}
七.简化删除的代码.
我们发现BST的删除又臭又长,而且调用的链难以处理,所以考虑简化一下代码.
同样的, F i n d _ v a l ( x ) Find\_val(x) Find_val(x)使得键值为 x x x的节点到了根的地方,若我们要移除根,可以找到 x x x的前驱或后继移到根,再把 x x x移到根儿子的位置,然后就可以直接删除了.
代码如下:
void Erase(int x){
int k=Find_val(x);
if (k==-1) return;
--tr[k].cnt;
if (tr[k].cnt<0) tr[k].cnt=0;
if (tr[k].cnt) return;
int nxt=Upper(tr[k].x);
Splay(k,nxt);
tr[nxt].s[0]=tr[k].s[0];if (tr[k].s[0]) tr[tr[k].s[0]].fa=nxt;
Pushup(nxt);
}
八.通过前驱后继写插入删除.
其实插入删除还可以通过前驱后继写得十分简单.
对于插入 x x x,我们可以先把 x x x的前驱节点 l l l和后继节点 r r r找到,然后把 l l l Splay到根, r r r Splay到 l l l下面,然后 r r r的右儿子就可以直接插入 x x x了…
同理,删除 x x x只需要把插入到 r r r的右儿子改成把 r r r的右儿子设成 0 0 0就可以了…
不过这样写的话常数会很大,所以不是很推荐这样写…
代码如下:
int Insert(int x){
int l=Lower(x),r=Upper(x),k;
Splay(l,0);Splay(r,l);
k=tr[r].s[0];
k?++tr[k].cnt:k=New_node(x,r);
Splay(k,0);
return k;
}
void Erase(int x){
int l=Lower(x),r=Upper(x),k;
Splay(l,0);Splay(r,l);
k=tr[r].s[0];
if (!k) return;
--tr[k].cnt;
if (tr[k].cnt<0) tr[k].cnt=0;
if (tr[k].cnt) Splay(k,0);
else tr[r].s[0]=0,Splay(r,0);
}
九.完整代码.
普通平衡树代码如下:
//不用前驱后继简化插入删除
#include//用前驱后继简化插入删除
#include
十.时间复杂度分析.
splay的具体如何用严谨的势能法分析我还不会,但是可以写一下主要的思想.
显然造成一棵BST不平衡的节点必然只有一种节点——只有一个儿子的节点.
而splay一次双旋的作用效果是什么?就是破坏掉这种节点.
再来考虑每次构造这种节点必然需要 O ( 1 ) O(1) O(1)个操作,破坏这种节点必然只需要 O ( 1 ) O(1) O(1)次splay也就是 O ( log n ) O(\log n) O(logn)的复杂度,而操作次数只有 n n n次,所以复杂度是 O ( n log n ) O(n\log n) O(nlogn)的.