LD3320语音识别模块+MP3-TF-16P模块实现语音交互功能
LD3320语音识别模块+MP3-TF-16P模块实现语音交互功能
利用LD3320语音识别模块可以实现非特定人声语音控制单片机io口动作,而加入MP3-TF-16P语音播放模块,可以让语音识别富有灵魂的动感。
原理就是利用两个模块进行串口收发数据,实现我们想要的功能。
MP3-TF-16P模块: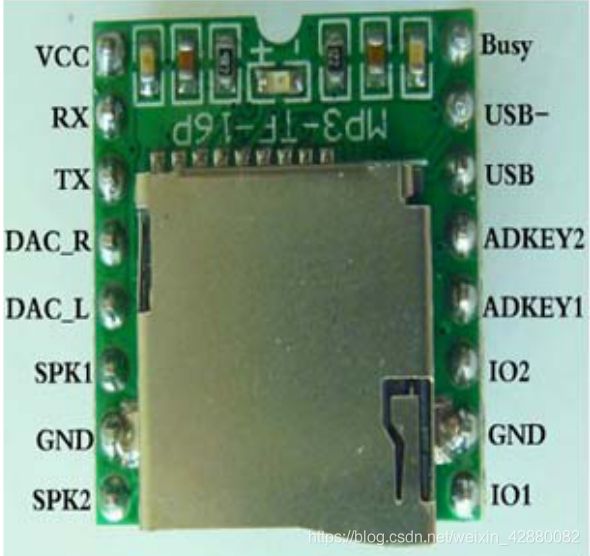
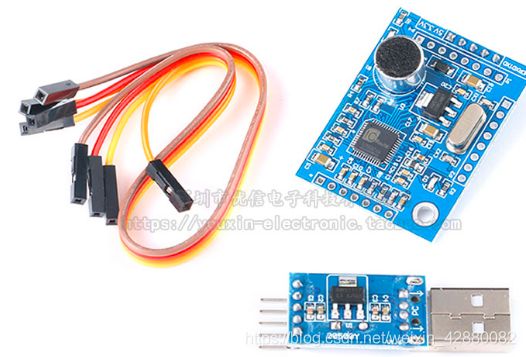
LD3320语音识别模块:
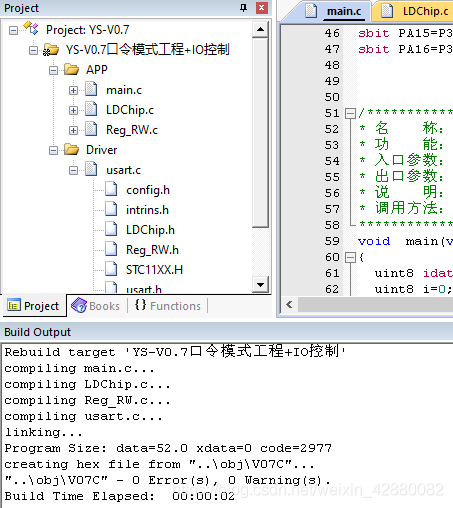
编译是0错误0警告的,是可用的。
man.c里面的代码
/******************************************************
** 工程名称:UNV-01语音识别模块驱动程序
** CPU: STC11L08XE
** 晶振:22.1184MHZ
** 波特率:9600 bit/S
** 配套产品信息:UNV-LD3320+STC11语音识别开发板
** 修改日期:2018.5.13
** 说明:口令模式: 即每次识别时都需要说“小鹰”这个口令 ,才能够进行下一级的识别
***************************/
#include "config.h"
/************************************************************************************/
// nAsrStatus 用来在main主程序中表示程序运行的状态,不是LD3320芯片内部的状态寄存器
// LD_ASR_NONE: 表示没有在作ASR识别
// LD_ASR_RUNING: 表示LD3320正在作ASR识别中
// LD_ASR_FOUNDOK: 表示一次识别流程结束后,有一个识别结果
// LD_ASR_FOUNDZERO: 表示一次识别流程结束后,没有识别结果
// LD_ASR_ERROR: 表示一次识别流程中LD3320芯片内部出现不正确的状态
/***********************************************************************************/
uint8 idata nAsrStatus=0;
void MCU_init();
void ProcessInt0(); //识别处理函数
void delay(unsigned long uldata);
void User_handle(uint8 dat);//用户执行操作函数
void Uart_SendCMD(int CMD ,int feedback , int dat);
void Delay200ms();
void Led_test(void);//单片机工作指示
uint8_t G0_flag=DISABLE;//运行标志,ENABLE:运行。DISABLE:禁止运行
sbit LED=P4^2;//信号指示灯
//应用IO口定义 (模块标注 P2)
sbit PA1=P1^0; //对应板上标号 P1.0
sbit PA2=P1^1; //对应板上标号 P1.1
sbit PA3=P1^2; //.....
sbit PA4=P1^3; //.....
sbit PA5=P1^4; //.....
sbit PA6=P1^5; //.....
sbit PA7=P1^6; //对应板上标号 P1.6
sbit PA8=P1^7; //对应板上标号 P1.7
sbit PA9=P4^1; //对应板上标号 P4.1
sbit PA10=P4^7; //对应板上标号 P2.7
sbit PA11=P2^6; //对应板上标号 P2.6
sbit PA12=P2^5; //对应板上标号 P2.5
sbit PA13=P2^4; //对应板上标号 P2.4
sbit PA14=P2^3; //对应板上标号 P2.3
sbit PA15=P3^3; //对应板上标号 P3.3
sbit PA16=P3^4; //对应板上标号 P3.4
/***********************************************************
* 名 称: void main(void)
* 功 能: 主函数 程序入口
* 入口参数:
* 出口参数:
* 说 明:
* 调用方法:
**********************************************************/
void main(void)
{
uint8 idata nAsrRes;
uint8 i=0;
Led_test();
MCU_init();
LD_Reset();
UartIni(); /*串口初始化*/
nAsrStatus = LD_ASR_NONE; // 初始状态:没有在作ASR
//复位所有io为低电平
PA1 &=0x00;
PA2 &=0x00;
PA3 &=0x00;
PA4 &=0x00;
PA5 &=0x00;
PA6 &=0x00;
PA7 &=0x00;
PA8 &=0x00;
PA9 &=0x00;
PA10 &=0x00;
PA11 &=0x00;
PA12 &=0x00;
PA13 &=0x00;
PA14 &=0x00;
PA15 &=0x00;
PA16 &=0x00;
while(1)
{
switch(nAsrStatus)
{
case LD_ASR_RUNING:
case LD_ASR_ERROR:
break;
case LD_ASR_NONE:
{
nAsrStatus=LD_ASR_RUNING;
if (RunASR()==0) /* 启动一次ASR识别流程:ASR初始化,ASR添加关键词语,启动ASR运算*/
{
nAsrStatus = LD_ASR_ERROR;
}
break;
}
case LD_ASR_FOUNDOK: /* 一次ASR识别流程结束,去取ASR识别结果*/
{
nAsrRes = LD_GetResult(); /*获取结果*/
User_handle(nAsrRes);//用户执行函数
nAsrStatus = LD_ASR_NONE;
break;
}
case LD_ASR_FOUNDZERO:
default:
{
nAsrStatus = LD_ASR_NONE;
break;
}
}// switch
}// while
}
/***********************************************************
* 名 称: LED灯测试
* 功 能: 单片机是否工作指示
* 入口参数: 无
* 出口参数:无
* 说 明:
**********************************************************/
void Led_test(void)
{
LED=~ LED;
Delay200ms();;
LED=~ LED;
Delay200ms();;
LED=~ LED;
Delay200ms();;
LED=~ LED;
}
/***********************************************************
* 名 称: void MCU_init()
* 功 能:
* 入口参数:
* 出口参数:
* 说 明:
* 调用方法:
**********************************************************/
void MCU_init()
{
P0 = 0xff;
P1 = 0xff;
P2 = 0xff;
P3 = 0xff;
P4 = 0xff;
LD_MODE = 0; // 设置MD管脚为低,并行模式读写
IE0=1;
EX0=1;
EA=1;
}
/***********************************************************
* 名 称: 延时函数
* 功 能:
* 入口参数:
* 出口参数:
* 说 明:
* 调用方法:
**********************************************************/
void Delay200us() //@22.1184MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 5;
j = 73;
do
{
while (--j);
} while (--i);
}
void delay(unsigned long uldata)
{
unsigned int j = 0;
unsigned int g = 0;
while(uldata--)
Delay200us();
}
void Delay200ms() //@22.1184MHz
{
unsigned char i, j, k;
i = 17;
j = 208;
k = 27;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
/***********************************************************
* 名 称: 中断处理函数
* 功 能:
* 入口参数:
* 出口参数:
* 说 明:
* 调用方法:
**********************************************************/
void ExtInt0Handler(void) interrupt 0
{
ProcessInt0();
}
/***********************************************************
* 名 称:用户执行函数
* 功 能:识别成功后,执行动作可在此进行修改
* 入口参数: 无
* 出口参数:无
* 说 明:
**********************************************************/
void User_handle(uint8 dat)
{
//UARTSendByte(dat);//串口识别码(十六进制)
if(0==dat) //判断是否识别一级口令
{
G0_flag=ENABLE;
LED = 0;
delay(10);
Uart_SendCMD(0x03 , 0, 0x01); //播放第一首
delay(10);
}
else if(ENABLE==G0_flag)
{
G0_flag=DISABLE;
LED=1;
switch(dat)
{
case CODE_KFBYZ: /*命令“开发板验证”*/
PA1 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x02); //播放第17首
delay(50);
break;
case CODE_DKJDQ: /*命令“打开继电器”*/
PA2 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x03); //播放第3首
Delay200ms();
break;
case CODE_GBJDQ: /*命令“关闭继电器”*/
PA2 &=0x00;
delay(50);
Uart_SendCMD(0x03,0,0x04); //播放第4首
delay(50);
break;
case CODE_KD: /*命令“开灯”*/
PA3 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x08); //播放第8首
delay(50);
break;
case CODE_GD: /*命令“关灯”*/
PA3 &=0x00;
delay(50);
Uart_SendCMD(0x03,0,0x07); //播放第7首
delay(50);
break;
case CODE_DKFS: /*命令“打开风扇”*/
PA4 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x05); //播放第5首
delay(50);
break;
case CODE_GBFS: /*命令“关闭风扇”*/
PA4 &=0x00;
delay(50);
Uart_SendCMD(0x03,0,0x06); //播放第6首
delay(50);
break;
case CODE_BB: /*命令“拜拜”*/
PA5 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x09); //播放第9首
delay(50);
break;
case CODE_BFYY: /*命令“播放歌曲”*/
PA6 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x0a); //播放第9首
delay(50);
break;
case CODE_XYS: /*命令“下一曲”*/
PA7 &=0x01;
delay(50);
Uart_SendCMD(0x17,0,0x01); //循环播放01文件夹下的曲目
delay(50);
break;
case CODE_PFZL: /*命令“播放曲目”*/
PA8 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x0c); //播放平凡之路
delay(50);
break;
case CODE_MZ: /*命令“播放曲目”*/
PA9 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x10); //播放芒种
delay(50);
break;
case CODE_SN: /*命令“播放曲目”*/
PA9 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x0d); //播放少年
delay(50);
break;
case CODE_NDDA: /*命令“播放曲目”*/
PA9 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x0e); //播放你的答案
delay(50);
break;
case CODE_JL: /*命令“播放曲目”*/
PA9 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x0f); //播放惊雷
delay(50);
break;
case CODE_QYS: /*命令“播放曲目”*/
PA1 &=0x01;
delay(50);
Uart_SendCMD(0x03,0,0x11); //播放七月上
delay(50);
break;
default:
break;
}
}
else
{
}
}
最主要的功能,实现串口之间数据收发的是usart.c文件:
#include "config.h"
#define FOSC 22118400L //System frequency
uint32_t baud=9600; //UART baudrate
static int Send_buf[10] = {0} ;
/************************************************************************
函 数 名: 串口初始化
功能描述: STC10L08XE 单片机串口初始化函数
返回函数: none
其他说明: none
**************************************************************************/
void UartIni(void)
{
SCON = 0x50; //8-bit variable UART
TMOD = 0x20; //Set Timer1 as 8-bit auto reload mode
TH1 = TL1 = -(FOSC/12/32/baud); //Set auto-reload vaule
TR1 = 1; //Timer1 start run
ES = 1; //Enable UART interrupt
EA = 1; //Open master interrupt switch
}
/************************************************************************
功能描述: 串口发送一字节数据
入口参数: DAT:带发送的数据
返 回 值: none
其他说明: none
**************************************************************************/
void UARTSendByte(uint8_t DAT)
{
ES = 0;
TI = 0;
SBUF = DAT;
while(TI==0);
TI=0;
ES = 1;
}
/*****************************************************************************************************
- 功能描述: 串口发送一帧数据
- 隶属模块: 内部
- 参数说明:
- 返回说明:
- 注:无
*****************************************************************************************************/
void SendCmd(int len)
{
int i = 0 ;
UARTSendByte(0x7E); //起始
for(i=0; i<len; i++)//数据
{
UARTSendByte(Send_buf[i]) ;
}
UARTSendByte(0xEF) ;//结束
}
/********************************************************************************************
- 功能描述:求和校验
- 隶属模块:
- 参数说明:
- 返回说明:
- 注: 和校验的思路如下
发送的指令,去掉起始和结束。将中间的6个字节进行累加,最后取反码
接收端就将接收到的一帧数据,去掉起始和结束。将中间的数据累加,再加上接收到的校验
字节。刚好为0.这样就代表接收到的数据完全正确。
********************************************************************************************/
void DoSum( int *Str, int len)
{
int xorsum = 0;
int i;
for(i=0; i<len; i++)
{
xorsum = xorsum + Str[i];
}
xorsum = 0 -xorsum;
*(Str+i) = (int)(xorsum >>8);
*(Str+i+1) = (int)(xorsum & 0x00ff);
}
/********************************************************************************************
- 功能描述: 串口向外发送命令[包括控制和查询]
- 隶属模块: 外部
- 参数说明: CMD:表示控制指令,请查阅指令表,还包括查询的相关指令
feedback:是否需要应答[0:不需要应答,1:需要应答]
data:传送的参数
- 返回说明:
- 注:
********************************************************************************************/
void Uart_SendCMD(int CMD ,int feedback , int dat)
{
Send_buf[0] = 0xff; //保留字节
Send_buf[1] = 0x06; //长度
Send_buf[2] = CMD; //控制指令
Send_buf[3] = feedback;//是否需要反馈
Send_buf[4] = (int)(dat >> 8);//datah
Send_buf[5] = (int)(dat); //datal
DoSum(&Send_buf[0],6); //校验
SendCmd(8); //发送此帧数据
}
```c
LDCChip.c:
```c
/***************************飞音云电子****************************
** 工程名称:YS-V0.7语音识别模块驱动程序
** CPU: STC11L08XE
** 晶振:22.1184MHZ
** 波特率:9600 bit/S
** 配套产品信息:YS-V0.7语音识别开发板
** http://yuesheng001.taobao.com
** 作者:zdings
** 联系:[email protected]
** 修改日期:2013.9.13
** 说明:口令模式: 即每次识别时都需要说“小杰”这个口令 ,才能够进行下一级的识别
/***************************飞音云电子******************************/
//#include LDChip.h:
#ifndef LD_CHIP_H
#define LD_CHIP_H
#define uint8 unsigned char
#define uint16 unsigned int
#define uint32 unsigned long
// 以下五个状态定义用来记录程序是在运行ASR识别过程中的哪个状态
#define LD_ASR_NONE 0x00 /* 表示没有在作ASR识别*/
#define LD_ASR_RUNING 0x01 /* 表示LD3320正在作ASR识别中*/
#define LD_ASR_FOUNDOK 0x10 /*表示一次识别流程结束后,有一个识别结果*/
#define LD_ASR_FOUNDZERO 0x11 /*表示一次识别流程结束后,没有识别结果*/
#define LD_ASR_ERROR 0x31 /*表示一次识别流程中LD3320芯片内部出现不正确的状态*/
#define CLK_IN 22.1184 /* 用户注意修改输入的晶振时钟大小 */
#define LD_PLL_11 (uint8)((CLK_IN/2.0)-1)
#define LD_PLL_MP3_19 0x0f
#define LD_PLL_MP3_1B 0x18
#define LD_PLL_MP3_1D (uint8)(((90.0*((LD_PLL_11)+1))/(CLK_IN))-1)
#define LD_PLL_ASR_19 (uint8)(CLK_IN*32.0/(LD_PLL_11+1) - 0.51)
#define LD_PLL_ASR_1B 0x48
#define LD_PLL_ASR_1D 0x1f
//函数声明
void LD_Reset();
void LD_Init_Common();
void LD_Init_ASR();
uint8 RunASR(void);
void LD_AsrStart();
uint8 LD_AsrRun();
uint8 LD_AsrAddFixed();
uint8 LD_GetResult();
//识别码客户修改处
#define CODE_CMD 0x00 //该命令码0x00用户不可进行修改。
#define CODE_KFBYZ 0x01 //开发板验证
#define CODE_DKJDQ 0x02 //打开继电器
#define CODE_GBJDQ 0x03 //关闭继电器
#define CODE_KD 0x04 //开灯
#define CODE_GD 0x05 //关灯
#define CODE_ZJ 0x09 //再见
#define CODE_BFYY 0x06 //播放歌曲
#define CODE_DKFS 0x07 //打开风扇
#define CODE_GBFS 0x08 //关闭风扇
#define CODE_BB 0x09 //拜拜
#define CODE_XYS 0x10 //循环播放01文件夹下的曲目
#define CODE_PFZL 0x0a //平凡之路
#define CODE_SN 0x0b //曲目少年
#define CODE_NDDA 0x0c //曲目你的答案
#define CODE_MZ 0x0e //曲目芒种
#define CODE_JL 0x0f //曲目惊雷
#define CODE_QYS 0x11 //曲目七月上
//调节识别距离,数值越大越远,但误识别概率越大
#define MIC_VOL 0x42 //咪头增益(灵敏度调节)范围:0X00-0X7f 越大越灵敏,
#endif
这是几个主要 程序文件内容,我会将完整的资料全部附上。
百度网盘:(资料收集和整理不容易,对于有帮助的人希望点个赞,开源不容易,分享很难得,谢谢大家支持)
链接:https://pan.baidu.com/s/1L-kCb3w71FydvwWSvZAQUw
提取码:mkc5