基于基于模型设计(MBD)(我没打错)的机械臂开发课程学习笔记(1)——基本知识和环境配置
目录
▶ MBD的一些基本知识
● 什么是MBD
● MBD开发流程
● MIL模型在环测试:
● SIL软件在环测试:
● PIL处理器在环测试:
● HIL处理器在环测试:
▶ 安装支持包及相关软件
▶ simulink代码生成示例:点亮LED
● 首先对仿真环境进行配置
● 建立simulink模型
● 生成代码
● 将生成的代码通过ccs下载到dsp
老师最近在研究MBD,于是我们的各种课题也都向MBD靠拢。。。
虽然觉得MBD的噱头成分比较多,但是机械臂的东西学一学还是很有用的。
❤ 2020.5.2 ❤
课程是睿慕课平台中科深谷的,由于是付费课程,出于版权的考虑,我尽量少贴PPT里面图片,多记录一些自己的理解和经历。
▶ MBD的一些基本知识
● 什么是MBD
我也不知道,建议百度。
● MBD开发流程

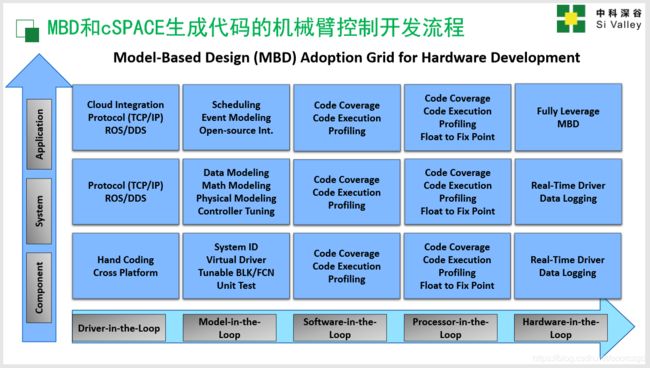
● MIL模型在环测试:
● SIL软件在环测试:
● PIL处理器在环测试:
● HIL处理器在环测试:
❤ 2020.5.4 ❤
▶ 安装支持包及相关软件
这套系统使用的软件有matlab2018b,c2000系列dsp支持包,ccs6.2,control SUITE等。
我的matlab是从学校网站下载的教育版,安装好后下载ti的c2000系列硬件支持包。
在主界面点“附加功能”→“获取硬件支持包”

选这个
按照提示先把需要的组件安装好
装完之后继续安装硬件支持包,装着装着还要求安装一些乱七八糟的软件

CCS

关于ccs的版本不知道有没有要求,说明里面写的是必须6.2,可是软件包里给的却是9.01,先装上再说
controlSUITE
c2000ware
选择正确的ccs安装目录
选择这个不知道干什么的文件夹位置,这个文件夹不在matlab的安转目录,而是在c盘programdata里面。
终于装完了
▶ simulink代码生成示例:点亮LED
就像每个编程语言的第一讲都是hello world,每个嵌入式开发第一个练习都是点亮led。
首先进入simulink仿真环境,新进一个项目并保存,目录中不能有中文。
● 首先对仿真环境进行配置
点configuration

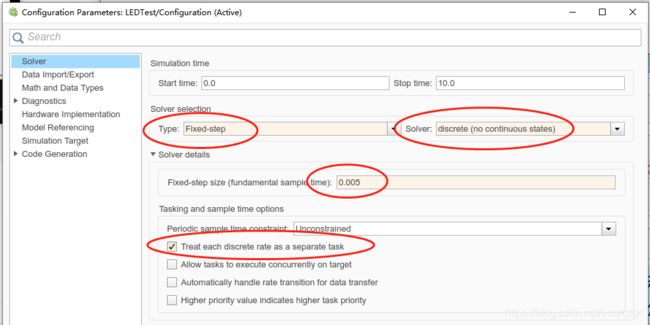
求解器类型选择固定步长,离散型,采样间隔时间0.005s,另外最下面那个圈我也不知道干嘛的,我看他选了我就选上了。
然后是hardware implementation
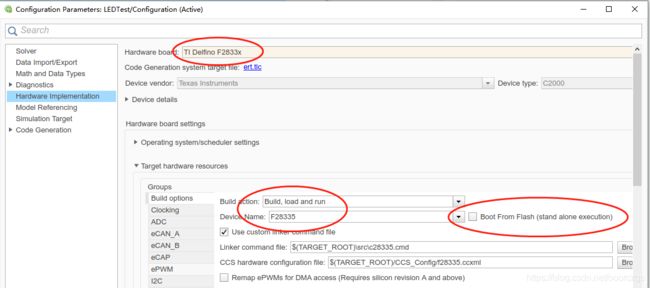
hardware选F2833x,这里注意boot from flash不选用来在线仿真,程序写到ram中,掉电后程序丢失,选中后用来离线操作,程序写到flash中,掉电后不会丢失。
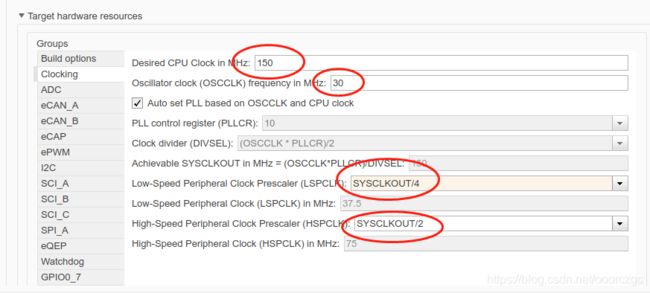
clocking选项卡根据需要设置。
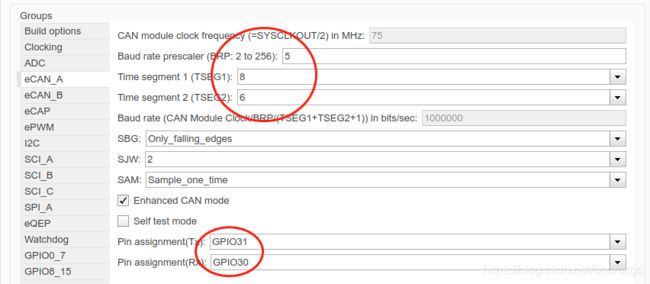
CANA根据使用情况进行配置。
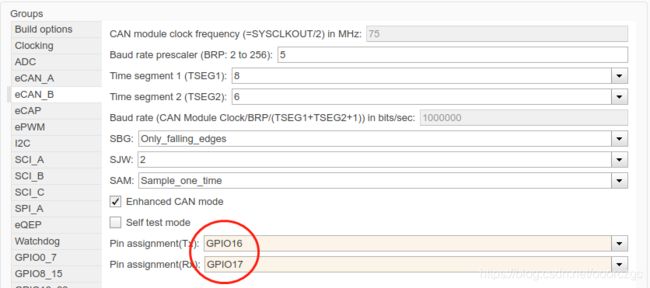
CANB也是。
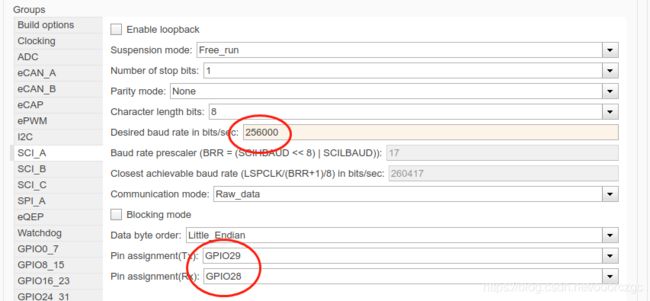
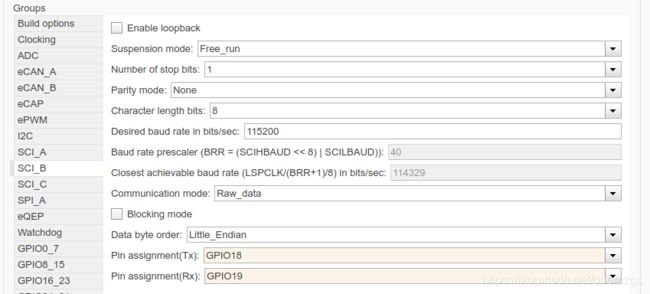
SCIA、SCIB同。
接着是code generation

确保选择的是c2000
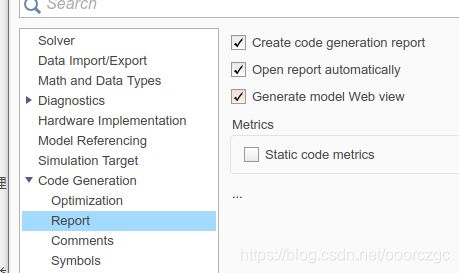
report里面把三个都选上
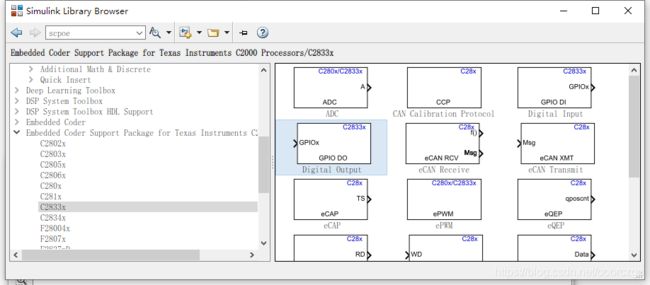
● 建立simulink模型
在library browser里面选择c2000支持包下的digital output
配置参数

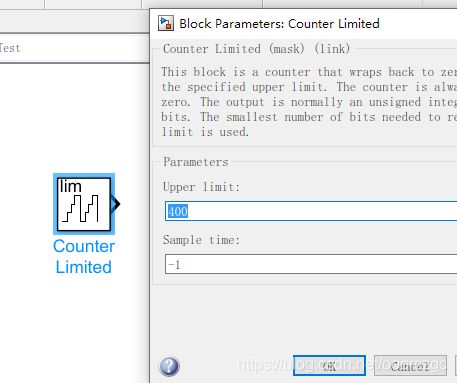
添加sources下的counter limited
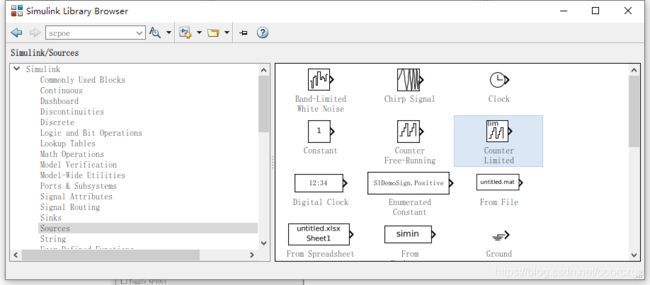
配置参数
选择logic and bit operations下的compare to constant
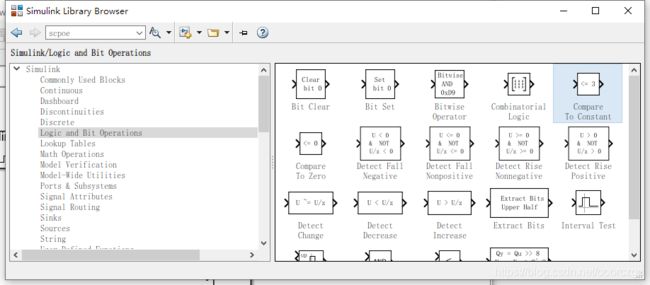
配置参数

然后把他们连接起来,加个scope

设置仿真时间,开始
查看scope
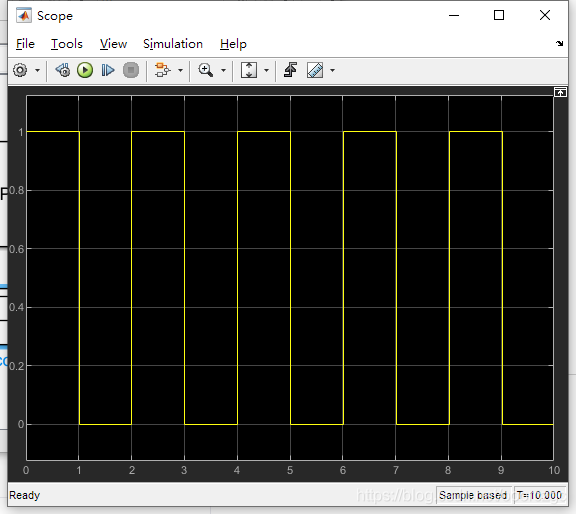
OK没问题。
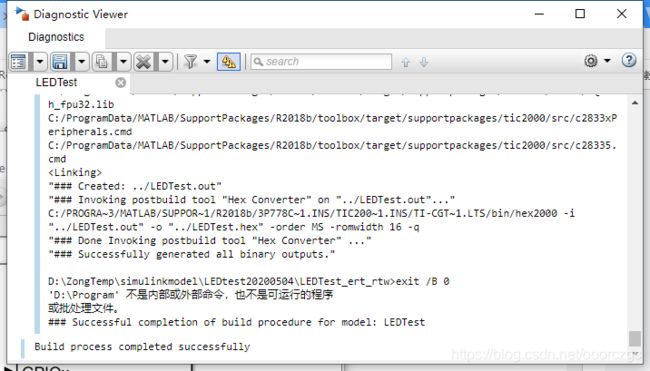
● 生成代码
正常的话电机这个就能生成仿真代码,但是我并没有dsp的板子,也没安装仿真器,不知道会不会有问题,先点一下试试。
果然,报错了
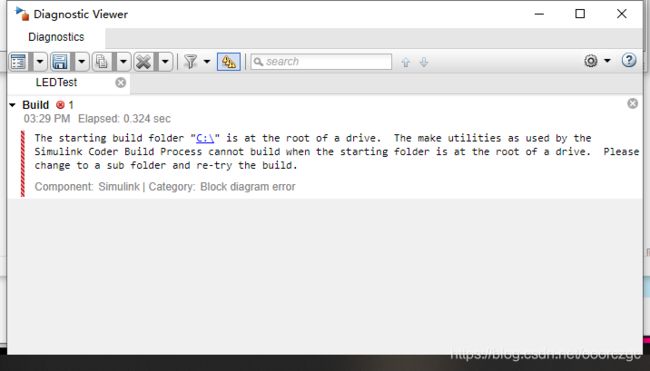
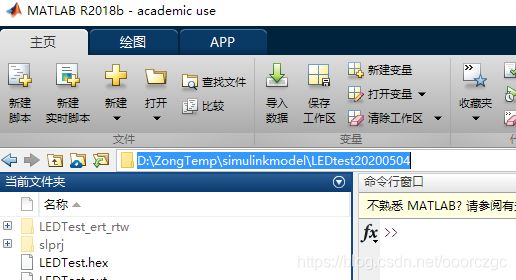
从字面意思上来看,大概就是什么文件夹选成了驱动器根目录,让我换一个。我找了半天也没有什么设置目录的地方呀。。。
在一番百度之后,我惊讶的发现原来matlab窗口现实的目录就是工作目录!震惊!

这个其实是我修改过之后的截图了,之前我使用过程中一直没有改过这里的路径,也没有什么问题,吓得我赶紧把路径设置为simulink模型文件的存储路径。
再build,果然这个错误不再提示了,也能正常显示report窗口了。
但是还是报错
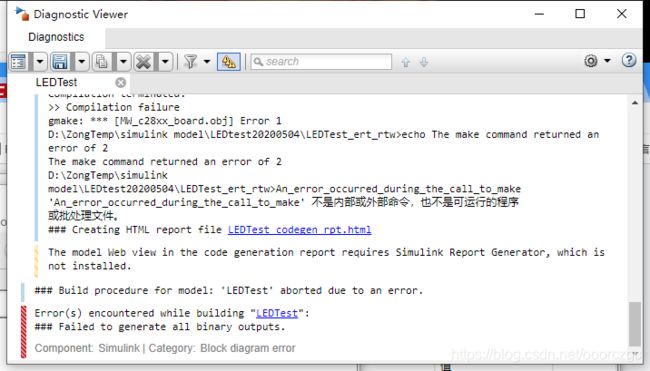
经过我缜密的分析(以及百度),我觉得问题可能是在这里
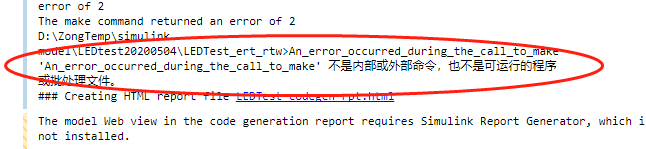
可能是因为我的文件夹名字中间加了个空格,把空格去掉,build,OK没问题。
不过还是提示了一个warning,但这个是matlab的安装目录,应该没问题吧
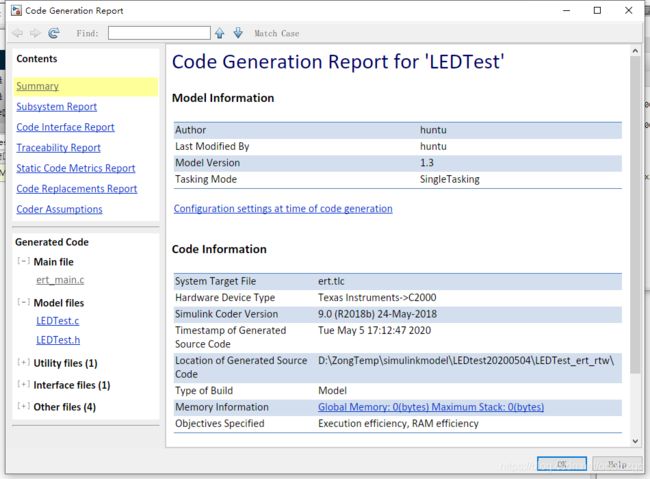
不过还有个问题,别人的report窗口是这样的,我的怎么不太一样。。。

♣ 注意:有的模块是不支持生成代码的,可以双击模块选help里面可以看是不是支持代码生成。
♣ 注意:生成代码时默认生成到matlab主界面所显示的路径中,而不是simulink工程的路径,所以在生成代码前要先选择好正确的路径。
● 将生成的代码通过ccs下载到dsp
复制simulink输出的文件路径
在ccs里,import
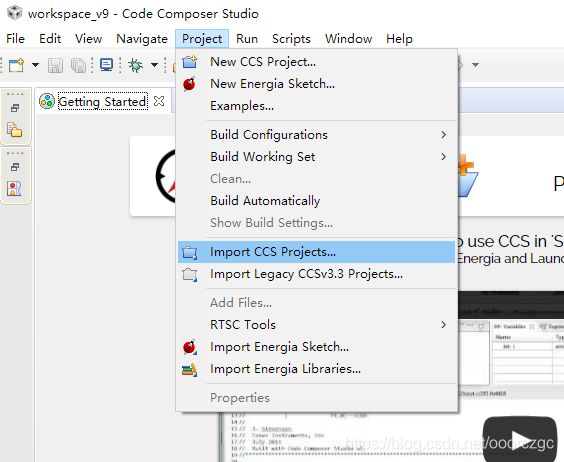
把路径粘贴到这里,按一下回车
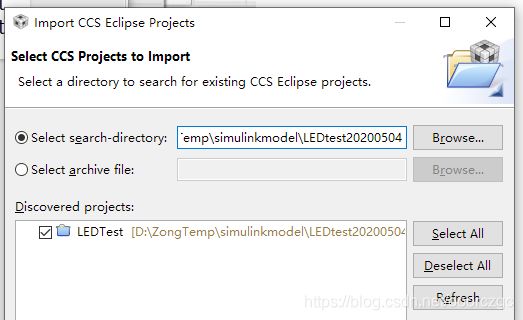
双击f28335.ccxml配置仿真器,配置好后可以点右边测试连接
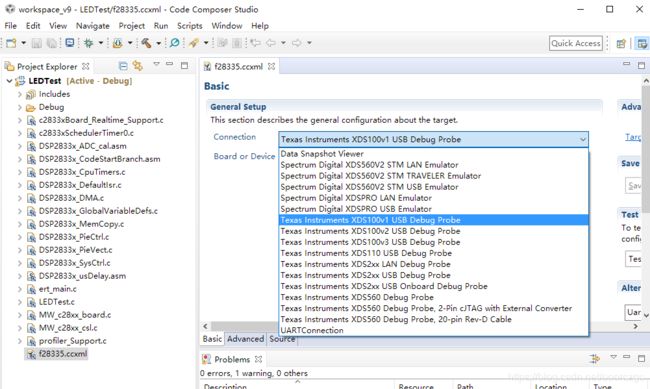
配置好后就可以按照普通的ccs工程进行操作了。