- Python高级数据类型:字典(Dictionary)
PythonicCC
python开发语言
字典是Python中非常重要且实用的数据结构,本文将全面详细地介绍字典的所有知识点,从基础概念到高级用法,帮助初学者彻底掌握字典的使用。1.字典简介1.1为什么需要字典?假设我们需要存储公司员工的姓名、年龄、职务和工资信息。使用列表可以这样实现:staff_list=[["tom",20,"teacher",6000],["rose",18,"hr",5000],["jack",20,"行政",4
- For what
鲜宇夫
ItrainedoutsideintheafternoonAfterabusyday,IhavenoideaabouttheoutsideworldItfeelscoolwhentheriverwindblowsWhatwoulditbeliketoaskmyselfoverandoveragainInretrospect,itseemsnotworthitSomanybeautifulthing
- .NET 9 RC 2正式发布
li dream
.net
距离最终版本还有一个月的时间,Microsoft已经交付了.NET9的第二个也是最后一个候选版本。.NET团队在公告帖子中写道[1],“当我们为11月的.NET9正式发布(GA)版本做准备时,我们正在对性能、稳定性和任何其他优化进行最后的润色,使其成为.NET9的最佳版本。.NET9ReleaseCandidate2包含在上线许可证中,因此您在生产应用程序中使用它时可以获得支持。我们鼓励开发人员今
- Microsoft 紧急修补 SharePoint 远程代码执行漏洞,应对持续网络攻击
微软紧急修复SharePoint高危漏洞并提供安全建议周日,微软发布了一个关键补丁,用于修复SharePoint中正在被恶意利用的安全漏洞,同时公布了另一个已通过"增强防护措施"修复的漏洞细节。这家科技巨头确认,目前已发现攻击者正针对本地部署的SharePointServer用户发起攻击,利用的是7月安全更新中未完全修复的漏洞。漏洞详情当前被利用的漏洞编号为CVE-2025-53770(CVSS评
- Windows10-ltsc-2019 使用 PowerShell 安装安装TranslucentTB教程(不通过微软商店安装)
lkm0522
microsoftTranslucentTB透明任务栏
Windows10-ltsc-2019使用PowerShell安装安装TranslucentTB教程(不通过微软商店安装)下载v2020.4(最后一个兼容1809的版本):TranslucentTB安装包(下载不了上面有安装包)安装依赖项(如未安装):#下载并安装x86版本的VCLibsInvoke-WebRequest-Uri"https://aka.ms/Microsoft.VCLibs.x8
- Windows批量修改文件属性方法
lkm0522
windows
标题使用icacls命令(推荐批量操作)打开管理员权限的命令提示符(CMD)执行以下命令:cmdicacls"文件夹路径"/grant用户名:(OI)(CI)F/T/C参数说明:(OI):对象继承-适用于文件夹(CI):容器继承-适用于子文件夹F:完全控制权限/T:递归处理所有子文件夹和文件/C:即使遇到错误也继续执行示例icacls"D:\EFI\Microsoft\Boot"/grantAdm
- PyTorch的基础概念和复杂模型的基本使用
香蕉可乐荷包蛋
AI大模型项目中的使用pytorch人工智能python
文章目录一、PyTorch基础概念二、复杂模型的学习使用一、PyTorch基础概念张量(Tensor)操作:张量是PyTorch中的基本数据结构,类似于NumPy的数组,但支持GPU加速常见操作包括创建张量、张量运算、索引、切片等importtorch#创建张量x=torch.randn(3,4)y=torch.zeros(3,4)#张量运算z=x+y自动求导(Autograd):PyTorch的
- XSS介绍及利用
0x00dream
常见漏洞webjavascript
XSS——跨站脚本攻击XSS介绍及利用**XSS的三种类型****构造xss脚本****自动化XSS——BeEF**XSS介绍及利用1、XSS介绍XSS(crosssitescripting)跨站脚本攻击,恶意攻击者往web页面里插入恶意script代码,当用户浏览该页面时,代码就会被执行2、XSS原理在HTML中常用到字符实体,对常用到的字符实体没有进行转译,导致完整的标签出现,在可输入的文本框
- ros2 server 可以设置命令同时获取位置
一个自定义服务SetCommandGetPose.srv:请求字段float32command响应字段geometry_msgs/Posepose服务端收到请求后,把command缓存下来,再把当前位姿填进响应返回。为了便于演示,位置用一个简单计数器模拟;你可以把它替换成TF、里程计或SLAM输出。一、创建功能包bash复制ros2pkgcreate--build-typeament_cmakep
- XSS的介绍
lq_ioi_pl
xss前端
目录XSS的原理反射型XSSDOM型XSS存储型XSS常见的XSSPayloadXSS的原理XSS全称跨站脚本(CrossSiteScripting),为避免与层叠样式表(CascadingStyleSheets,CSS)的缩写混淆,故缩写为XSS。这是一种将任意Javascript代码插入到其他Web用户页面中执行以达到攻击目的的漏洞。攻击者利用浏览器的动态展示数据功能,在HTML页面里嵌入恶意
- Excel处理控件Aspose.Cells教程:使用 Python 在 Excel 中进行数据验
CodeCraft Studio
文档管理控件excelpython开发语言
Excel中的数据验证功能可确保用户在工作表中输入正确的数据类型。无论您是构建动态模板、收集结构化数据还是准备财务报告,添加验证都有助于避免错误并保持一致性。在本文中,我们将探讨如何使用Python在Excel中实现数据验证。让我们深入研究实际的解决方案,以自动执行Excel验证任务-而无需安装MicrosoftExcel。Aspose.Cells最新版下载Excel中的数据验证是什么?Excel
- 深度学习方法生成抓取位姿与6D姿态估计的完整实现
ZPC8210
ROS深度学习人工智能
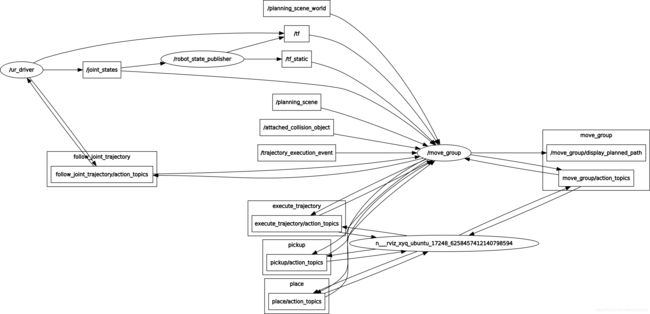
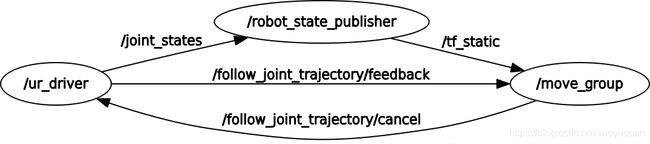
如何将GraspNet等深度学习模型与6D姿态估计集成到ROS2和MoveIt中,实现高精度的机器人抓取系统。1.系统架构text[RGB-D传感器]→[物体检测与6D姿态估计]→[GraspNet抓取位姿生成]→[MoveIt运动规划]→[执行抓取]2.环境配置2.1安装依赖bash#安装PyTorch(根据CUDA版本选择)pip3installtorchtorchvisiontorchaud
- LeetCode 72. 编辑距离(Edit Distance)| 动态规划详解
72.编辑距离题目描述给你两个单词word1和word2,请计算将word1转换为word2所需的最少操作数。你可以对一个单词进行以下三种操作:插入一个字符删除一个字符替换一个字符✅示例输入:word1="horse",word2="ros"输出:3解释:horse->rorse(替换h为r)rorse->rose(删除r)rose->ros(删除e)解题思路:动态规划(DP)✅状态定义dp[i]
- VSCode使用Jupyter完整指南配置机器学习环境
z日火
校招学习日记vscodejupyter机器学习
接下来开始机器学习部分第一步配置环境:VSCode使用Jupyter完整指南1.安装必要的扩展打开VSCode,按Ctrl+Shift+X打开扩展市场,搜索并安装以下扩展:必装扩展:Python(Microsoft官方)-Python语言支持Jupyter(Microsoft官方)-Jupyternotebook支持Pylance(Microsoft官方)-Python智能提示和语法检查推荐扩展:
- python连接数据库的方法,Python 连接数据库的多种方法
AI MIU
python连接数据库的方法
JZGKCHINAPython是一种计算机程序设计语言,它是一种动态的、面向对象的脚本语言。它是一种跨平台的,可以运行在Windows,Mac和Linux/Unix系统上。在日常使用中需要对大量数据进行数据分析,那么就必然用到数据库,我们常用的数据库有SQLServer,MySQL,Oracle,DB2,SQLite,Hive,PostgreSQL,MongoDB还有其他常用的MicrosoftA
- 【Linux操作系统】安装VS Code
LN花开富贵
Linuxlinux单片机物联网嵌入式硬件学习
更新系统包列表sudoaptupdate安装依赖项sudoaptinstallsoftware-properties-commonapt-transport-httpswget添加微软GPG密钥和仓库源wget-qhttps://packages.microsoft.com/keys/microsoft.asc-O-|sudoapt-keyadd-sudoadd-apt-repository"de
- python:numpy分享(保姆级教程)
苏苏susuus
pythonnumpy开发语言
目录一、概念二、相关属性三、ndarray及其实例创建(一)ndarray介绍(二)zeros()、ones()、empty()函数(三)**arange(),**类似python的range(),创建一个一维ndarray数组。(四)**matrix()**,是ndarray的子类,只能生成2维的矩阵(五)rand()、randn()、randint()、uniform()(都是numpy.ra
- 移除 GIL,可显著提升 Python 多线程性能么?
AIGC开发者
python1024程序员节python开发语言
近日,一位名叫SamGross的开发者提出了一个对全局解释器锁(GIL)进行重大修改的设想。其目标在于移除CPython中的GIL,以使得多线程能够并行执行Python代码。目前,该项目已经引起了Python核心开发团队的关注。我一直在对CPython进行修改,使其能够在没有全局解释器锁的情况下运行。我想与大家分享一个可以在没有GIL的情况下运行的概念验证。这个概念验证涉及到对CPython内部的
- 关于XSS的一点理解
「已注销」
XSS
什么是XSS攻击XSS,缩写自Cross-SiteScripting,即跨站脚本攻击,是一种注入型攻击方法,也就是攻击者把恶意脚本注入到良性和可信任的网站中。XSS攻击者通常会利用Web应用(通常在浏览器端脚本的form中)发送恶意代码给其他的Web应用用户。XSS的攻击原理就是攻击者使用XSS发送一些恶意的脚本代码给一些未防备的用户,这些用户的浏览器没办法分辨出这些脚本是否应该被信任,并且会完整
- 前端安全指南:防御XSS与CSRF攻击
天天进步2015
前端开发前端安全xss
引言随着互联网的快速发展,Web应用安全问题日益突出。作为前端开发者,了解常见的安全威胁及其防御措施至关重要。本文将重点介绍两种最常见的前端安全威胁:跨站脚本攻击(XSS)和跨站请求伪造(CSRF),并提供实用的防御策略。XSS攻击解析什么是XSS攻击?XSS(Cross-SiteScripting,跨站脚本)攻击是一种注入类型的攻击,攻击者通过在目标网站上注入恶意脚本代码,当用户浏览该页面时,恶
- C#8.0—非空引用类型
weixin_30642267
c#
C#8.0—非空引用类型原文:C#8.0—非空引用类型非空引用类型——C#8.0原文地址:https://devblogs.microsoft.com/dotnet/try-out-nullable-reference-types/?utm_source=vs_developer_news&utm_medium=referral该新增的特性最关键的作用是处理泛型和更高级API的使用场景。这些都是我
- 学习笔记(66):Python入门教程-datetime模块时间运算
顾子宇
研发管理python编程语言Python小猿圈Python入门教程
立即学习:https://edu.csdn.net/course/play/24459/296363?utm_source=blogtoedudatetime模块:datetime.date:表示日期的类,常用属性有year,month,daydatetime.time:表示时间的类,常用的属性有hour,minute,second,microseconddatetime.datetime:表示日
- 【网络安全】XSS漏洞- XSS基础概述及利用
SUGERBOOM
网络安全web安全xss安全
本章讲解XSS漏洞的基础理论和漏洞利用。主要包含三个方面:跨站脚本攻击漏洞概述、跨站脚本攻击漏洞类型及场景、跨站脚本攻击漏洞实操一、跨站脚本攻击漏洞概述1.1定义跨站脚本(Cross-siteScripting)攻击,攻击者通过网站注入点注入客户端可执行解析的payload(脚本代码),当用户访问网页时,恶意payload自动加载并执行,以达到攻击者目的(窃取cookie、恶意传播、钓鱼欺骗等)为
- Spring AOP(面向切面编程,Aspect-Oriented Programming)
SpringAOP(面向切面编程,Aspect-OrientedProgramming)一、SpringAOP是什么?SpringAOP是Spring框架提供的面向切面编程支持,用于将横切关注点(cross-cuttingconcerns,如日志、事务、权限检查等)与核心业务逻辑分离。AOP允许开发者通过声明式方式将通用功能模块化,减少代码重复,提高代码可维护性。核心概念Aspect(切面):切面
- 051-OpenCV GrabCut图像分割算法
话不多说,上代码,看结果。importcv2#导入库importnumpyasnp'''cv2.imread(filename,flags)#filename为文件名,图片与.py文件在一个文件夹时输入文件名即可#不在一个文件夹时输入图片的路径和名字#flags为图片的颜色类型,默认为1,灰度图像为0'''img=cv2.imread('89.jpg')mask=np.zeros(img.shap
- windows下jar包配置为开机自启动
在jar包目录新建一个start.bat文件,然后写入启动命令java-jarX.jar2.仍然在此目录,新建start.vbs文件,然后写入一下命令,命令最后一个0是隐藏窗口运行createobject("wscript.shell").run"D:\start.bat",03.创建run.vbs的快捷方式,移动到开机自启动目录下:C:\ProgramData\Microsoft\Windows
- golang的编译过程分析
转载自:https://halfrost.com/go_command/引言Go语言这两年在语言排行榜上的上升势头非常猛,Go语言虽然是静态编译型语言,但是它却拥有脚本化的语法,支持多种编程范式(函数式和面向对象)。Go语言最最吸引人的地方可能是其原生支持并发编程(语言层面原生支持和通过第三方库支持是有很大区别的)。Go语言的对网络通信、并发和并行编程的支持度极高,从而可以更好地利用大量的分布式和
- 考研英语语法_Day04_定语从句
一、什么是定语?只要听到"…的+名词","…的"就是修饰这个名词的定语。二、定语的成分1、形容词修饰名词2、名词修饰名词(第二个名词+of+第一个名词)3、介词短语作定语4、非谓语动词作定语5、从句修饰名词6、形容词性物主代词举个栗子:Eg1:Theinnocentnightingaledied.Eg2:Thesingingofthenightingalecanmaketherosebloom.E
- Failed to fetch http://packages.ros.org.ros/ubuntu/dists/xenial/InRelease
尝试了将地址修改成http://packages.ros.org/ros/ubuntu/dists/xenial/InRelease,更差;尝试了sudorm-f/etc/apt/sources.list.d/ros-latest.list/binary-amd64/Packages不建议这么做。过了一阵子,自己好了!!!!总结:查看自己网络连接,或者等一会再update,自己就好了。
- HKUST-Aerial-Robotics/VINS-Mono 测试过程中遇到的问题
Kris_u
Linuxlinux
ubuntu18.041、sudoapt-getupdate失败:GPGerror:http://packages.ros.org/ros/ubuntubionicInRelease:详细错误信息:Thefollowingsignatureswereinvalid:EXPKEYSIGF42ED6FBAB17C654OpenRoboticsW:Failedtofetchhttp://packages
- 312个免费高速HTTP代理IP(能隐藏自己真实IP地址)
yangshangchuan
高速免费superwordHTTP代理
124.88.67.20:843
190.36.223.93:8080
117.147.221.38:8123
122.228.92.103:3128
183.247.211.159:8123
124.88.67.35:81
112.18.51.167:8123
218.28.96.39:3128
49.94.160.198:3128
183.20
- pull解析和json编码
百合不是茶
androidpull解析json
n.json文件:
[{name:java,lan:c++,age:17},{name:android,lan:java,age:8}]
pull.xml文件
<?xml version="1.0" encoding="utf-8"?>
<stu>
<name>java
- [能源与矿产]石油与地球生态系统
comsci
能源
按照苏联的科学界的说法,石油并非是远古的生物残骸的演变产物,而是一种可以由某些特殊地质结构和物理条件生产出来的东西,也就是说,石油是可以自增长的....
那么我们做一个猜想: 石油好像是地球的体液,我们地球具有自动产生石油的某种机制,只要我们不过量开采石油,并保护好
- 类与对象浅谈
沐刃青蛟
java基础
类,字面理解,便是同一种事物的总称,比如人类,是对世界上所有人的一个总称。而对象,便是类的具体化,实例化,是一个具体事物,比如张飞这个人,就是人类的一个对象。但要注意的是:张飞这个人是对象,而不是张飞,张飞只是他这个人的名字,是他的属性而已。而一个类中包含了属性和方法这两兄弟,他们分别用来描述对象的行为和性质(感觉应该是
- 新站开始被收录后,我们应该做什么?
IT独行者
PHPseo
新站开始被收录后,我们应该做什么?
百度终于开始收录自己的网站了,作为站长,你是不是觉得那一刻很有成就感呢,同时,你是不是又很茫然,不知道下一步该做什么了?至少我当初就是这样,在这里和大家一份分享一下新站收录后,我们要做哪些工作。
至于如何让百度快速收录自己的网站,可以参考我之前的帖子《新站让百
- oracle 连接碰到的问题
文强chu
oracle
Unable to find a java Virtual Machine--安装64位版Oracle11gR2后无法启动SQLDeveloper的解决方案
作者:草根IT网 来源:未知 人气:813标签:
导读:安装64位版Oracle11gR2后发现启动SQLDeveloper时弹出配置java.exe的路径,找到Oracle自带java.exe后产生的路径“C:\app\用户名\prod
- Swing中按ctrl键同时移动鼠标拖动组件(类中多借口共享同一数据)
小桔子
java继承swing接口监听
都知道java中类只能单继承,但可以实现多个接口,但我发现实现多个接口之后,多个接口却不能共享同一个数据,应用开发中想实现:当用户按着ctrl键时,可以用鼠标点击拖动组件,比如说文本框。
编写一个监听实现KeyListener,NouseListener,MouseMotionListener三个接口,重写方法。定义一个全局变量boolea
- linux常用的命令
aichenglong
linux常用命令
1 startx切换到图形化界面
2 man命令:查看帮助信息
man 需要查看的命令,man命令提供了大量的帮助信息,一般可以分成4个部分
name:对命令的简单说明
synopsis:命令的使用格式说明
description:命令的详细说明信息
options:命令的各项说明
3 date:显示时间
语法:date [OPTION]... [+FORMAT]
- eclipse内存优化
AILIKES
javaeclipsejvmjdk
一 基本说明 在JVM中,总体上分2块内存区,默认空余堆内存小于 40%时,JVM就会增大堆直到-Xmx的最大限制;空余堆内存大于70%时,JVM会减少堆直到-Xms的最小限制。 1)堆内存(Heap memory):堆是运行时数据区域,所有类实例和数组的内存均从此处分配,是Java代码可及的内存,是留给开发人
- 关键字的使用探讨
百合不是茶
关键字
//关键字的使用探讨/*访问关键词private 只能在本类中访问public 只能在本工程中访问protected 只能在包中和子类中访问默认的 只能在包中访问*//*final 类 方法 变量 final 类 不能被继承 final 方法 不能被子类覆盖,但可以继承 final 变量 只能有一次赋值,赋值后不能改变 final 不能用来修饰构造方法*///this()
- JS中定义对象的几种方式
bijian1013
js
1. 基于已有对象扩充其对象和方法(只适合于临时的生成一个对象):
<html>
<head>
<title>基于已有对象扩充其对象和方法(只适合于临时的生成一个对象)</title>
</head>
<script>
var obj = new Object();
- 表驱动法实例
bijian1013
java表驱动法TDD
获得月的天数是典型的直接访问驱动表方式的实例,下面我们来展示一下:
MonthDaysTest.java
package com.study.test;
import org.junit.Assert;
import org.junit.Test;
import com.study.MonthDays;
public class MonthDaysTest {
@T
- LInux启停重启常用服务器的脚本
bit1129
linux
启动,停止和重启常用服务器的Bash脚本,对于每个服务器,需要根据实际的安装路径做相应的修改
#! /bin/bash
Servers=(Apache2, Nginx, Resin, Tomcat, Couchbase, SVN, ActiveMQ, Mongo);
Ops=(Start, Stop, Restart);
currentDir=$(pwd);
echo
- 【HBase六】REST操作HBase
bit1129
hbase
HBase提供了REST风格的服务方便查看HBase集群的信息,以及执行增删改查操作
1. 启动和停止HBase REST 服务 1.1 启动REST服务
前台启动(默认端口号8080)
[hadoop@hadoop bin]$ ./hbase rest start
后台启动
hbase-daemon.sh start rest
启动时指定
- 大话zabbix 3.0设计假设
ronin47
What’s new in Zabbix 2.0?
去年开始使用Zabbix的时候,是1.8.X的版本,今年Zabbix已经跨入了2.0的时代。看了2.0的release notes,和performance相关的有下面几个:
:: Performance improvements::Trigger related da
- http错误码大全
byalias
http协议javaweb
响应码由三位十进制数字组成,它们出现在由HTTP服务器发送的响应的第一行。
响应码分五种类型,由它们的第一位数字表示:
1)1xx:信息,请求收到,继续处理
2)2xx:成功,行为被成功地接受、理解和采纳
3)3xx:重定向,为了完成请求,必须进一步执行的动作
4)4xx:客户端错误,请求包含语法错误或者请求无法实现
5)5xx:服务器错误,服务器不能实现一种明显无效的请求
- J2EE设计模式-Intercepting Filter
bylijinnan
java设计模式数据结构
Intercepting Filter类似于职责链模式
有两种实现
其中一种是Filter之间没有联系,全部Filter都存放在FilterChain中,由FilterChain来有序或无序地把把所有Filter调用一遍。没有用到链表这种数据结构。示例如下:
package com.ljn.filter.custom;
import java.util.ArrayList;
- 修改jboss端口
chicony
jboss
修改jboss端口
%JBOSS_HOME%\server\{服务实例名}\conf\bindingservice.beans\META-INF\bindings-jboss-beans.xml
中找到
<!-- The ports-default bindings are obtained by taking the base bindin
- c++ 用类模版实现数组类
CrazyMizzz
C++
最近c++学到数组类,写了代码将他实现,基本具有vector类的功能
#include<iostream>
#include<string>
#include<cassert>
using namespace std;
template<class T>
class Array
{
public:
//构造函数
- hadoop dfs.datanode.du.reserved 预留空间配置方法
daizj
hadoop预留空间
对于datanode配置预留空间的方法 为:在hdfs-site.xml添加如下配置
<property>
<name>dfs.datanode.du.reserved</name>
<value>10737418240</value>
- mysql远程访问的设置
dcj3sjt126com
mysql防火墙
第一步: 激活网络设置 你需要编辑mysql配置文件my.cnf. 通常状况,my.cnf放置于在以下目录: /etc/mysql/my.cnf (Debian linux) /etc/my.cnf (Red Hat Linux/Fedora Linux) /var/db/mysql/my.cnf (FreeBSD) 然后用vi编辑my.cnf,修改内容从以下行: [mysqld] 你所需要: 1
- ios 使用特定的popToViewController返回到相应的Controller
dcj3sjt126com
controller
1、取navigationCtroller中的Controllers
NSArray * ctrlArray = self.navigationController.viewControllers;
2、取出后,执行,
[self.navigationController popToViewController:[ctrlArray objectAtIndex:0] animated:YES
- Linux正则表达式和通配符的区别
eksliang
正则表达式通配符和正则表达式的区别通配符
转载请出自出处:http://eksliang.iteye.com/blog/1976579
首先得明白二者是截然不同的
通配符只能用在shell命令中,用来处理字符串的的匹配。
判断一个命令是否为bash shell(linux 默认的shell)的内置命令
type -t commad
返回结果含义
file 表示为外部命令
alias 表示该
- Ubuntu Mysql Install and CONF
gengzg
Install
http://www.navicat.com.cn/download/navicat-for-mysql
Step1: 下载Navicat ,网址:http://www.navicat.com/en/download/download.html
Step2:进入下载目录,解压压缩包:tar -zxvf navicat11_mysql_en.tar.gz
- 批处理,删除文件bat
huqiji
windowsdos
@echo off
::演示:删除指定路径下指定天数之前(以文件名中包含的日期字符串为准)的文件。
::如果演示结果无误,把del前面的echo去掉,即可实现真正删除。
::本例假设文件名中包含的日期字符串(比如:bak-2009-12-25.log)
rem 指定待删除文件的存放路径
set SrcDir=C:/Test/BatHome
rem 指定天数
set DaysAgo=1
- 跨浏览器兼容的HTML5视频音频播放器
天梯梦
html5
HTML5的video和audio标签是用来在网页中加入视频和音频的标签,在支持html5的浏览器中不需要预先加载Adobe Flash浏览器插件就能轻松快速的播放视频和音频文件。而html5media.js可以在不支持html5的浏览器上使video和audio标签生效。 How to enable <video> and <audio> tags in
- Bundle自定义数据传递
hm4123660
androidSerializable自定义数据传递BundleParcelable
我们都知道Bundle可能过put****()方法添加各种基本类型的数据,Intent也可以通过putExtras(Bundle)将数据添加进去,然后通过startActivity()跳到下一下Activity的时候就把数据也传到下一个Activity了。如传递一个字符串到下一个Activity
把数据放到Intent
- C#:异步编程和线程的使用(.NET 4.5 )
powertoolsteam
.net线程C#异步编程
异步编程和线程处理是并发或并行编程非常重要的功能特征。为了实现异步编程,可使用线程也可以不用。将异步与线程同时讲,将有助于我们更好的理解它们的特征。
本文中涉及关键知识点
1. 异步编程
2. 线程的使用
3. 基于任务的异步模式
4. 并行编程
5. 总结
异步编程
什么是异步操作?异步操作是指某些操作能够独立运行,不依赖主流程或主其他处理流程。通常情况下,C#程序
- spark 查看 job history 日志
Stark_Summer
日志sparkhistoryjob
SPARK_HOME/conf 下:
spark-defaults.conf 增加如下内容
spark.eventLog.enabled true spark.eventLog.dir hdfs://master:8020/var/log/spark spark.eventLog.compress true
spark-env.sh 增加如下内容
export SP
- SSH框架搭建
wangxiukai2015eye
springHibernatestruts
MyEclipse搭建SSH框架 Struts Spring Hibernate
1、new一个web project。
2、右键项目,为项目添加Struts支持。
选择Struts2 Core Libraries -<MyEclipes-Library>
点击Finish。src目录下多了struts