深度学习研究理解10:Very Deep Convolutional Networks for Large-Scale Image Recognition
本文是牛津大学 visual geometry group(VGG)Karen Simonyan 和Andrew Zisserman 于14年撰写的论文,主要探讨了深度对于网络的重要性;并建立了一个19层的深度网络获得了很好的结果;在ILSVRC上定位第一,分类第二。
一:摘要
……
从Alex-net发展而来的网络主要修改一下两个方面:
1,在第一个卷基层层使用更小的filter尺寸和间隔;
2,在整个图片和multi-scale上训练和测试图片。
二:网络配置
2.1配置
2.1.1 小的Filter尺寸为3*3
卷积的间隔s=1;3*3的卷基层有1个像素的填充。
1:3*3是最小的能够捕获上下左右和中心概念的尺寸。
2:两个3*3的卷基层的有限感受野是5*5;三个3*3的感受野是7*7,可以替代大的filter尺寸
3:多个3*3的卷基层比一个大尺寸filter卷基层有更多的非线性,使得判决函数更加具有判决性。
4:多个3*3的卷积层比一个大尺寸的filter有更少的参数,假设卷基层的输入和输出的特征图大小相同为C,那么三个3*3的卷积层参数个数3*(3*3*C*C)=27CC;一个7*7的卷积层参数为49CC;所以可以把三个3*3的filter看成是一个7*7filter的分解(中间层有非线性的分解)。
2.1.2 1*1 filter:
作用是在不影响输入输出维数的情况下,对输入线进行线性形变,然后通过Relu进行非线性处理,增加网络的非线性表达能力。
Pooling:2*2,间隔s=2;
2.2 结构
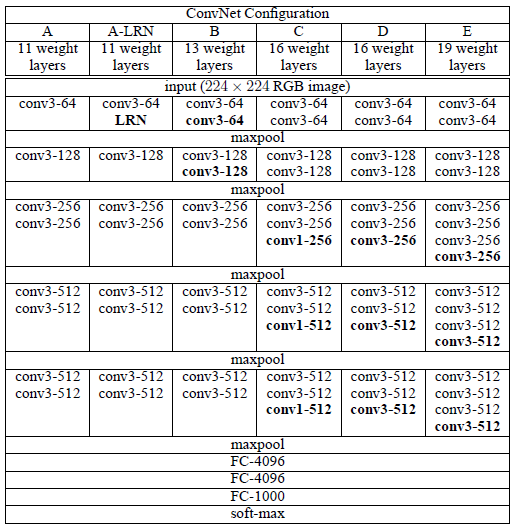
和之前流行的三阶段网络不通的是,本文是有5个max-pooling层,所以是5阶段卷积特征提取。每层的卷积个数从首阶段的64个开始,每个阶段增长一倍,直到达到最高的512个,然后保持。
基本结构A:
Input(224,224,3)→64F(3,3,3,1)→max-p(2,2)→128F(3,3,64,1)→max-p(2,2) →256F(3,3,128,1)→256F(3,3,256,1)→max-p(2,2)→512F(3,3,256,1)→512F(3,3,512,1)→max-p(2,2)→512F(3,3,256,1)→512F(3,3,512,1)→max-p(2,2)→4096fc→4096fc→1000softmax
8个卷基层,3个全连接层,共计11层;作者只说明了使用3*3filter的原因,至于层数,阶段数,特征数为什么这么设计,作者并没有说明。
参数个数:网络E和OverFeat模型参数差不多

B:在A的stage2 和stage3分别增加一个3*3的卷基层,10个卷积层,总计13层
C:在B的基础上,stage3,stage4,stage5分别增加1*1的卷积层,13个卷基层,总计16层
D:在C的基础上,stage3,stage4,stage5分别增加3*3的卷积层,13个卷基层,总计16层
E:在D的基础上,stage3,stage4,stage5分别增加3*3的卷积层,16个卷基层,总计19层
三,分类框架
3.1训练参数设置
Minibatch=256,其它的都一样。
作者发现,尽管VGG比Alex-net有更多的参数,更深的层次;但是VGG需要很少的迭代次数就开始收敛。这是因为
1,深度和小的filter尺寸起到了隐式的规则化的作用
2,一些层的pre-initialisation
pre-initialisation:网络A的权值W~(0,0.01)的高斯分布,bias为0;由于存在大量的ReLU函数,不好的权值初始值对于网络训练影响较大。为了绕开这个问题,作者现在通过随机的方式训练最浅的网络A;然后在训练其他网络时,把A的前4个卷基层(感觉是每个阶段的以第一卷积层)和最后全连接层的权值当做其他网络的初始值,未赋值的中间层通过随机初始化。
Multi-scale 训练
把原始 image缩放到最小边S>224;然后在full image上提取224*224片段,进行训练。
方法1:在S=256,和S=384上训练两个模型,然后求平均
方法2:类似OverFeat测试时使用的方法,在[Smin,Smax]scale上,随机选取一个scale,然后提取224*224的图片,训练一个网络。这种方法类似图片尺寸上的数据增益。
3.2 测试
测试阶段的方法和OverFeat测试方法相同,首先选定一个scale:Q,然后在这个图片上应用卷积网络,在最后一个卷积阶段产生unpooled FM,然后利用sliding window方法,每个pooling window产生一个分类输出,然后融合各个pooling window的结果,得到最终分类。这样比10-view更加高效,只需计算一次卷积过程。
3.3 部署细节
利用C++ Caffe toolbox,在4个Titan Gpu上并行计算,比单独GPU快3.75倍,每个网络差不多2-3周。
四,分类实验
4.1 测试阶段single-scale对比
A vs A-LRN:A-LRN结果没有A好,说明LRN作用不大。
A vs B,C,D,E:越深越好
A vs C:增加1*1filter,即增加额外的非线性确实提升效果
C vs D:3*3的filter比1*1filter要好,使用较大的filter能够捕捉更大的空间特征。
训练方法:在scale区间[256;512]通过scale增益来训练网络,比在固定的两个S=256和S=512,结果明显提升。Multi-scale训练确实很有用,因为ZF论文中,卷积网络对于缩放有一定的不变性,通过multi-scale训练可以增加这种不变性的能力。
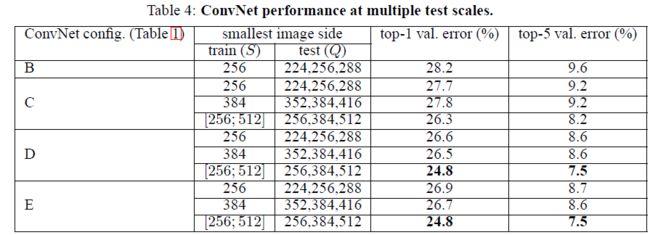
4.2 Multi-scale训练
方法1:single-scale训练 S,multi-scale测试 {S-32,S,S+32}
方法2:multi-scale训练[Smin;Smax],multi-scale测试{Smin,middle,Smax}
结果:此处结果为B’
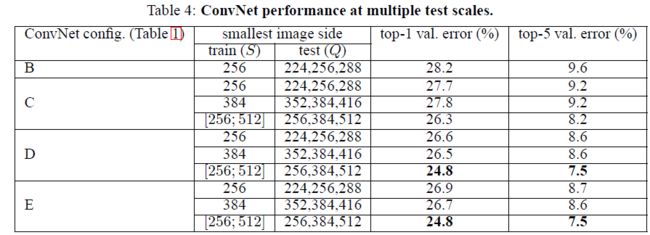
1 B vs B’, C vs C’,……:single-scale训练,利用multi-scale测试,有0.2%的top-5提升。
2 B-256 vs B-384 ……:single-scale在256和348上训练,无论用什么测试方法,结果基本上差不多。说明网络在单个scale上提取能力有限。
3 multi-scale训练,multi-scale测试,对于网络提升明显,D’和E’的top-5分类达到了7.5%。
4.3 模型融合
通过结果求平均,融合上面不同网络的结果。
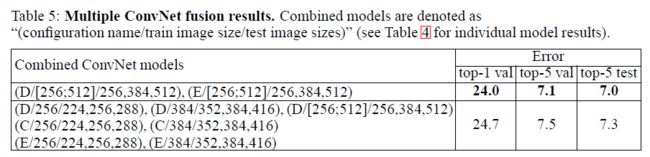
模型融合结果如上图,比较有意思的是,模型D和E两个顶尖模型融合的结果比融合7个模型的结果还要好。这个比较有意思,模型融合个数多,反而没有两个网络的好。这个是为什么?没有想明白。
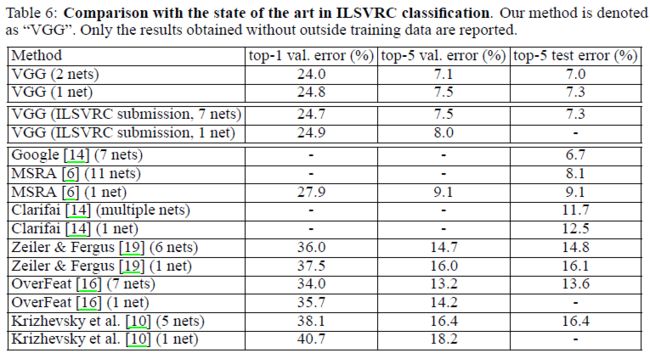
4.4和其他网络比较
本文的结果和博文9中的结果有一些差距,感觉可能是训练平台和方法的原因,不同的训练平台和方法对于结果也有影响。
五,定位
5.1 定位网络
和OverFeat的方法类似,使用模型D(参数最少,表现最好)通过回归函数来替换分类器,两种分类方法:SCR(single-classregression),用一个回归函数来学习预测所有类别的bounding box;PCR(per-class regression)每个类别有自己单独的一个回归函数。
训练:分别在S=256和S=384上训练两个模型,网络反馈学习时,探究了两种情况1,fine tuning整个网络;2,只调整全连接层。
测试:
第一种测试框架:定位网络只应用在图像的裁剪中心,用于比较不同的网络修改下性能。

1,发现fine-tuning整个网络的定位性能,比值调整全连接层权值的定位结果要好。
2,PCR比SCR结果好,这个和OverFeat的结果相反。
所以最好的定位方法是采用PCR,fine-tuning整个网络。
第二种测试框架:利用OverFeat的贪婪融合过程(不使用offset pooling),在整个图像上密集应用定位网络;首先根据softmax分类结果给定bounding box的置信得分,然后融合空间相似的bounding box,最后选取最大置信得分的bounding box。
在不同scale下,定位结果。

1,适当的scale对于定位结果有影响S=384好于S=256。
2,multi-scale比single-scale好。
3,multi-model fusion会更好。
和其它state-of-the-art方法比较:
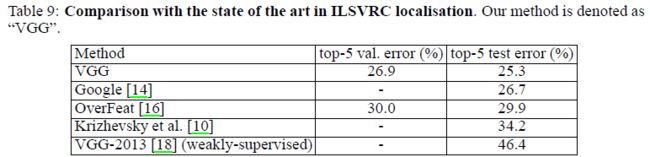
在使用较少的scale下,在不使用offset pooling情况下,本文的结果比OverFeat提高很多;曹成这种提高的原因主要在于网络结构上的不同,好网络,好分类,好定位,估计还有好检测。
六,结论
深度是获得好结果的关键。
一些理解和困惑
感觉本文在网络探讨阶段和博文9中探索最优网络比较类似;都是首先提出一个结果不错的基础网络A,然后在网络A上进行一些列的修改,一步一步地提高网络性能,进而探索好的网络设计应该是什么样的;博文9平衡网络各个因素探讨的方式比本文比计较复杂度情况下增加深度,更加精细。而且两篇文章的关于深度的结论相同,深度可以提升结果,但是深度会饱和。
这里最大的疑问就是他们的网络A是怎么提来的。
博文9中的A结构:
Input(224,224,3)→64F(7,7,3,s=2) →max-p(3,3,3)→128F(5,5,64) →max-p(2,2,2) →256F(3,3,128)→256F(3,3,256)→256F(3,3,256)→spp(6*6,3*3,2*2,1*1)→4096fc→4096fc→softmax
感觉博文9的结构借鉴了Alex-net,ZF-net和本文的VGG,例如这种三段式结构是从瘦身版的Alex-net和ZF-net中来的,第一个卷积层有64个filter而不是96个,感觉是借鉴了本文第一卷积层的结构;还有就是可能依据本文或OverFeat中剔除了LRN。
但是本文的结构就找不到关系了, 5阶段,filter的个数尺寸,网络结构等64-128-256-512-512;使用3*3小filter作者已经解释了原因,但是这个关键的网络结构作者并没有给出具体的设计依据,而是直接给出了结果;感觉一个是凭借经验,再有就是凭借实验;结合博文9中的观点,感觉VGG网络还可以利用其中层析替换思想来提高分类结果。
里一个困惑,就是“PCR比SCR结果好,这个和OverFeat的结果相反”;OverFeat中在三scale下 SCR-vs-PCR为31.3-vs-44.1;SCR要明显好于PCR,OverFeat作者的解释是PCR顶层有更多的回归函数,继而有更多的参数,而每个类别的训练样本有限,导致每个类别的回归函数不能够很好的训练;但是本文作者的网络中PCR明显好于SCR,训练样本并没有增多,现在感觉OverFeat这种每类训练样本少的解释合理性有待商榷;此外网络结构不同感觉是两个结果区别的关键,除卷积提取阶段不同外;全连接层的结构也不同OverFeat网络是4096-1024-regression;本文的网络是4096-4096-regression;从对比来看造成这种差距的原因估计是网络结果上的问题;但是这个可以解释为什么本文的结果比OverFeat的结果好,如果用网络结构来解释PCR比SCR好,感觉有些牵强。所以感觉PCR和SCR两种预测bounding box方法的影响因素,还是有些不明白。“还有一个不同的地方就是在上面的测试中,本文给出了图片真正的分类,然后更具真是的类比,预测bounding box;而不是采用先预测分类,在预测bounding box的方法” 。