威廉·莎士比亚真的写过《哈姆雷特》吗?基于置信度的知识表示学习
摘要
知识图谱能够提供重要的关系信息,在各种任务中得到了广泛的应用。然而,在KGs中可能存在大量的噪声和冲突,特别是在人工监督较少的自动构造的KGs中。为了解决这一问题,我们提出了一个新的置信度感知(confidence-aware)知识表示学习框架(CKRL),该框架在识别KGs中可能存在的噪声的同时进行有置信度的知识表示学习。具体地说,我们在传统的基于翻译的知识表示学习方法中引入了三元组置信度。为了使三次置信度更加灵活和通用,我们只利用KGs中的内部结构信息,提出了同时考虑局部三次和全局路径信息的三次置信度。在知识图噪声检测、知识图补全和三重分类等方面对模型进行了评价。实验结果表明,我们的置信度感知模型在所有任务上都取得了显著和一致的改进,这证实了我们的CKRL模型在噪声检测和知识表示学习方面的能力。
介绍
近年来,人工智能的蓬勃发展对我们的日常生活产生了广泛的影响。在信息检索和问题回答等领域,人们并不满足于仅仅匹配,而是期望 人工智能代理(AI agents) 具有理解、推理和解决问题的知识。知识图谱是基于知识的人工智能代理的重要支持者,它提供实体之间有效的、结构良好的关系信息。典型的KG通常存储具有三重事实的知识(头实体、关系、尾实体),也简称为(h;r;t)。传统的知识图构建方法通常需要大量的人工监督或专家标注,极其费时费力。
因此,自动化机制和众包在知识构建中占据了较大的比重,但由于人力监督的限制,这些方法可能会产生噪音和冲突。
例如,最新型的基准关系提取模型在召回率为20%时只能达到60%左右的精度[Lin et al., 2016]。
此外,[Heindorf et al., 2016]重点研究了Wikidata中的故意破坏行为检测,这也暗示了大规模KGs中噪声的存在和问题,知识表示学习(Knowledge representation learning, KRL)以分布式表示KGs,为知识的使用提供了一种有效而灵活的方式。
因此,在知识表示学习和知识应用中考虑噪声是至关重要的。

在构造无噪声知识表示的同时,尝试检测现有知识图中可能存在的噪声和冲突。大多数传统的KRL方法假定现有的知识图谱是绝对正确的。为了解决这一问题,我们提出了一个新的基于噪声的置信度感知知识表示学习框架(CKRL)。更具体地说,CKRL模型遵循了[Bordes et al.,2013]提出的基于翻译的框架,以三元组置信度的方式学习知识表示。同时考虑了局部路径信息和全局路径信息,提出了三种三元组置信度。通过全局一致性和多步路径推理,我们可以推断出莎士比亚是否写了《哈姆雷特》。为了使三元组置信度具有更大的通用性和灵活性,我们只考虑KGs内部的结构信息以获得更好的全局一致性,这使得信息的有限性使得噪声的处理更具挑战性。
在实验中,我们在知识图噪声检测、知识图完成和三重分类三个任务上评估了我们的模型。实验结果表明,我们的模型在所有任务上都取得了最好的性能,这证实了CKRL在噪声检测和知识表示学习方面的能力。本文的主要贡献如下:
- 提出了一种基于置信度感知的知识图噪声检测和知识表示学习的KRL框架,该框架只使用KGs中的内部结构信息。
- 我们在不同的噪声知识图上评估了我们的模型,并在所有任务上都取得了良好的效果。
2 相关工作
2.1 知识图噪声检测
噪声的存在似乎是不可避免的,它会强烈影响知识的获取[Manago and Kodratoff, 1987],因此噪声检测在知识构建和知识应用中至关重要。知识图噪声检测大多发生在构造知识图的过程中。例如,YAGO2在人的监督下从维基百科中提取知识,人类法官会被呈现一些选定的事实,他们必须对这些事实的正确性进行评估[Hoffart等人,2013]。Wikidata还依赖于一种众包的人工管理软件,在这种软件中,贡献者可以拒绝或批准一项声明[Pellissier Tanon等人,2016]。DBpedia通过全球范围的众包工作创建到维基百科信息盒的映射[Lehmann等人,2015]。在大型KGs中进行这些噪声检测,往往需要耗费大量的人力,是非常耗费人力和时间的。
在自动KG噪声检测方面,一种名为Wikidata vandalism的新任务引起了广泛关注,该任务旨在对抗知识图的故意破坏[Heindorf et al., 2015]。
然而,现有的大部分方法主要集中在内容、用户、项目和修订的特征选择上[Heindorf et al., 2016],因此受到外部信息完整性的限制。
对于图中的节点[Gy ongyi et al., 2004]或边[De Meo et al., 2012],也有一些研究致力于判断图中节点的重要性,但很少有人关注每个三元组的置信度。
在本文中,我们提出了三置信度,主要针对知识图噪声检测和知识表示学习中KGs的内部结构信息。
2.2 基于平移的KRL方法
知识图的分布式表示是近年来研究的热点,其中基于平移的知识图表示方法是一种直观有效的知识图表示方法。TransE [Bordes et al.,2013]将实体和关系投射到连续的低维向量空间中,将关系解释为头尾实体之间的转换操作。通过平移假设可以得到h + r ≈t方程,能量函数定义如下:
一些改进的基于平移的方法尝试在特定关系超平面上进行平移[Wang et al., 2014]、特定关系实体投影[Lin et al., 2015b]和特定类型实体投影[Xie et al., 2016]来解决这一问题。此外,翻译假设只关注三元组中的局部信息,可能无法充分利用KGs中的全局图信息[Lin et al., 2015a]将TransE扩展为将多步关系路径信息编码为知识表示学习。然而,大多数传统的KRL方法都假设KG中的所有三元具有相同的置信度,这尤其不适用于那些无需人工监督就自动构建的KG。据我们所知,我们的模型是第一个考虑KRL中现有KGs置信度的嵌入方法。在本文中,我们跟随TransE来学习知识表示,而其他增强的基于翻译的方法也不难利用我们的置信度感知KRL框架。
3 理论
首先给出本文中使用的符号。鉴于三重事实(h;r;t),我们考虑头和尾实体h;
t∈E 且关系r∈R,其中E和R代表实体和关系的集合。T代表整个训练的三个事实,包括可能的冲突和噪音。为了检测知识图中可能存在的噪声并学习更好的知识表示方法,我们对每个三元组事实引入了一个新的三元组置信度概念。
三元组置信度描述了三元组置信度正确的可能性,可以通过内部结构信息和外部异质信息来衡量。
3.1 基于置信度感知的KRL框架
我们尝试检测噪声和学习更好的三元组置信度的知识表征,更多地集中在高置信度。遵循基于平移的框架,我们设计了置信度感知的KRL能量函数如下

置信度感知能量函数可分为两个部分:E(h; r; t) = ||h + r - t||表示头、关系、尾的不同,与TransE相同。差异性得分越低,说明其对应的三元组能够更好地拟合平移假设。与传统方法不同的是,我们还引入了三元组置信C(h;r;t)作为能量函数的第二部分。三元组置信度越高,说明三次关系知识的可信度越高。
三元组置信度可以在构建知识图的过程中和之后计算,可以从内部信息如KG结构和外部信息如文本证据等多方面计算。为了使我们的三重置信更具普遍性和实用性,在我们的模型中,我们只考虑构建KG后的内部结构信息,并在接下来的章节中提出了三种三元组置信度。在训练过程中,我们同时对每三组的差异性和置信度进行测量,从而得到更好的知识表示。
3.2 目标形式化
在本节中,我们将介绍模型的详细训练目标。根据TransE [Bordes et al., 2013],我们形式化了一个基于边际的分数函数,并将负采样作为训练目标。这个成对得分函数试图使正三元组的得分高于负三元组的得分。我们有:

对于成对训练,由于知识图中没有明确的负三元组,我们按照以下规则对负三元组进行采样:

它是指正三元组中的一个实体或关系被整个集合中的另一个实体或关系随机替换。注意,与TransE不同,我们还添加了关系替换,以提高关系预测的性能。
我们还确认替换后生成的负三元组不在T中,以确保它们确实是负的。
3.3 局部三元组置信度
我们首先提出局部三元组置信度(LT),它只关注三元组内部。由于我们的CKRL框架遵循h + r ≈ t的翻译假设,直接利用不同函数来判断三元组的置信度是很直接的。此外,传统的基于翻译的三元分类方法的良好结果也证实了正三元组应该很好地符合翻译规则。
我们假设三元组越符合翻译规则,该三元组就越有说服力。为了在训练过程中测量局部三元组置信度,我们首先根据翻译假设来判断每个三重的当前一致性。受基于边际的训练策略启发,我们直接使用相同的成对函数来计算三重质量Q(h;r;t)如下:

在翻译假设下,三次质量得分越高,三次质量得分越高。
在训练中,我们首先将局部三重置信度初始化为1。
由于训练过程中存在着演化的实体和关系的嵌入,因此应根据其动态的三重属性进行相应的改变。具体而言,(h;r;t)变化如下:

3.4全局路径置信度
局部三重置信度是直接和有效的,而仅仅关注三元组内部将无法使用知识图中丰富的全局结构信息。关系路径可以为三元组提供丰富的全局信息作为支持证据。例如,已知关系路径(h,born_in_city,e)和(e,in_nation,t),我们可以高置信度推断(h,born_in_nation,t),因此,我们提出了全局路径置信度来考虑多步关系路径。
我们假设,如果三元组有更多语义上接近对应关系的可靠路径,那么三元组将被认为更可信。在接下来的章节中,我们首先介绍了如何量化一个三元组下的关系路径可靠性,然后提出了两种策略,利用共现信息和学习的知识表示来衡量路径和关系之间的语义相似性。
路径可靠性的关系
我们假设,如果一个关系路径从头尾实体承载了更多的信息流,那么它就应该被认为是更重要的。具体来说,我们遵循路径约束资源分配(PCRA) [Lin et al., 2015a]来度量关系路径可靠性。PCRA的关键思想受到资源配置的启发[Zhou et al., 2007],该思想假设有一定的资源与头实体h相关联,并通过所有关系路径流遍整个知识图。在给定实体对(h;t)。

先验路径的置信度
首先引入先验路径置信度(PP),利用关系和路径的共现来表示它们的不同。
我们假设,路径之间的关系越多,它们就越有可能代表相似的语义。
形式上,给定一个三重(h;r;t)及其路径集S(h;t),包含h与t之间的所有路径,第i个关系路径对(r;pi)是这样写的


表示的先验路径置信度,依赖于S(h;t)中所有路径的关系路径相似性及其对应的关系路径可靠性。注意,由于我们只考虑路径和关系的先验概率,因此在训练过程中先验路径的置信度是固定的。
适应路径置信度
在训练过程中,先验路径置信度保持不变,不灵活,可能会受到KGs中存在的噪声和冲突的强烈约束。为了解决这个问题,我们提出了自适应路径置信度(AP),它可以根据所学习的嵌入灵活地学习关系路径质量。

由于我们假设关系嵌入应该与路径嵌入相似,因此较低的QAP (r;
pi)暗示了一个更有说服力的关系路径对。
自适应路径置信度写如下:

整合上面三种置信度,我们有:

3.5 优化与实现细节
我们利用小批量随机梯度下降(SGD)优化模型。在训练中,所有的实体和关系嵌入可以随机初始化,也可以用TransE预训练,所有的三元组的局部三重置信度都被初始化为1。对于那些没有路径的实体对,我们直接将其基于路径的信任设置为0。
路径选择在我们的模型中至关重要,它将对性能产生重大影响。由于所有路径的数量随最大路径长度的增加呈指数增长,因此用KG来枚举所有路径是不现实的。此外,当逻辑链走得太远时,基于路径的推理将变得更弱。考虑到有效性和效率,我们将路径的最大长度限制为最多两步。因为关系是有向边,所以我们在检测关系路径时也要考虑那些反向关系。
4 实验
4.1 数据集
在本文中,我们评估了基于FB15K的自信感知模型[Bordes et al., 2013],它是提取自Freebase的典型基准知识图[Bollacker et al., 2008]。但在FB15K中没有明显的标记噪声或冲突。因此,我们基于FB15K生成不同噪声概率的新数据集,以模拟自动构建的真实世界知识图,减少人工标注。
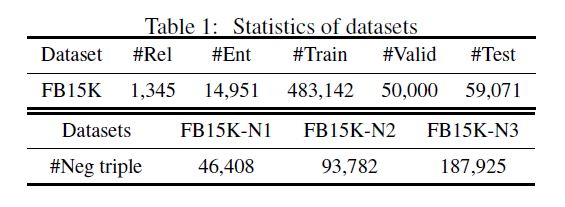
受名为三元组分类的评价任务预处理的启发,我们在[Socher et al., 2013]中按照相同的设置构造了负三元组。具体来说,给定一个正三元组(h;r;t)在KG中,我们随机切换其中一个头或尾实体以形成一个负三重(h0;r;t)或(h;r;t0)。实体替换受到dataset中与relation出现在相同位置的新实体的约束,即h0应该出现在正三组r的头位置(e.g. the head of relation write should be a writer)。这个约束侧重于生成更困难和更令人困惑的情况,因为那些带有错误样式实体的负三元组很容易被检测到。我们可以直接在Freebase中利用实体类型信息,或者遵循局部封闭世界假设[Krompa民兵等,2015]来收集实体约束信息。根据该协议,我们基于FB15K构造了3个带有噪声的正三组的KGs,分别为10%、20%和40%,然后丢弃少量违反类型约束的负三组。这些有噪声的数据集与FB15K共享相同的实体集、关系集、验证集和测试集,生成的所有负三元组都被融合到原始训练集中,表1列出了所有数据集的统计量。
4.2 实验设置
在实验中,我们使用三种不同的信心组合策略来评估我们的信心感知KRL模型。CKRL(LT)表示只考虑局部三置信度的策略,CKRL(LT+PP)同时考虑局部三置信度和先验路径置信度,而CKRL (LT+PP+AP)同时考虑三种置信度。我们采用TransE [Bordes et al., 2013]作为基线,因为我们的CKRL框架是基于TransE的,我们的信心框架在其他增强的基于平移的方法中使用并不困难。
我们使用小批量SGD来训练我们的CKRL模型,并将边界设为{0.5,1.0,2.0}。我们在{0.0005,0.001,0.002}中,经经验选取整体学习率,在训练时是固定的。对于局部三重置信,我们在{0.5,0.7,0.9}中选择下降控制器,在{0.0001,0.0005,0.001}中选择上升控制器。对于先验路径置信度,经验设置平滑为0.01。我们的模型的最优配置是:消融= 1.0,消融= 0.001,消融= 0.9,消融= 0.0001。在计算总体三重置信度时,我们也评估了多重组合权值的最小二乘法。我们根据不同的评估任务和数据集的总体性能选择一个统一的权重策略,以显示我们的模型的鲁棒性。对于CKRL (LT+PP),我们选择的是“模型”中的“模型”中的“模型”——“模型”中的“模型”——“模型”中的“模型”——“模型”中的“模型”——“模型”中的“模型”——“模型”中的“模型”:为了进行公平比较,所有模型中的实体和关联嵌入的维度都被相等地设置为50。
4.3 知识图噪声检测
为了验证我们的CKRL模型在识别知识图中的噪声和冲突方面的能力,我们提出了一个新的评估任务——知识图噪声检测。该任务的目的是根据知识图的三次得分来检测知识图中可能存在的噪声。
评估协议
受[Socher et al., 2013]中关于三重分类的评价度量的启发,我们将能量函数得分E(h, r, t) = ||h+r t||作为我们的三重得分,然后根据这些得分对训练集中的所有三元进行排序。那些得分较高的三组数据首先被认为是噪音。
我们利用精度/召回曲线来显示性能。
实验结果
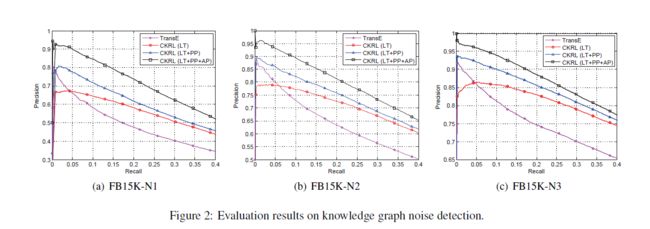
图2展示了消除知识图噪声的结果,从中我们可以看到:(1)我们的置信度感知KRL模型在三个不同噪声比例的数据集上都取得了最好的性能。验证了我们的CKRL模型在建立三置信度和检测知识图中的噪声和冲突方面的有效性。(2)CKRL(LT+PP+AP)与其他自信感知策略相比,在噪声检测方面有显著且持续的改进。说明自适应路径置信度可以为噪声检测提供更加灵活可靠的依据。此外,CKRL (LT+PP+AP) (LT+PP+AP)在召回率为10%的情况下,在不同的噪声比例下,其准确率达到了惊人的84-94%,这表明我们的模型能够在实际的KG噪声检测中发挥真正的作用。(3) CKRL (LT+PP)的性能优于CKRL (LT),这也说明全局路径信息可以作为局部三置信度的合格补充。
为了进行进一步的比较,我们还对PTransE进行了评估,它考虑了KRL中的多步路径,但结果却出人意料地比TransE差得多。我们发现,由于基于路径的能量函数分数只适用于两两比较,PTransE不能很好地区分噪声和正三组。由于空间有限,我们不给出PTransE的结果。
4.4知识图的完成
知识图完成是一项经典的评估任务,关注知识表示的质量[Bordes et al., 2012]。
该任务的目标是在缺少头、尾或关系的情况下完成一个三元组,可以看作是一个简单的问答任务。
评估协议
在本文中,我们主要关注实体的预测,这是由翻译假设h + r t。破纪录同样的设置(誉为et al ., 2013),我们进行两个指标作为评价指标:(1)意味着正确的实体,和(2)指出propor-tion Hits@10,正确答案的排名在前10名。

实验结果
表2展示了不同噪声比例下实体预测的结果。
我们可以观察到:(1)所有自信感知的KRL模型在所有有噪声数据集和所有评估指标上一致且显著优于基线。
该算法不仅能检测知识图中的噪声,而且能很好地完成知识图的补全,证明了所学习知识的质量。
(2)对比不同数据集间的评价结果,我们发现,随着KGs中噪声比例的增大,我们引入的信心感知方法所带来的改进更有意义。
指出了噪声对实体预测的危害,同时也重申了在知识边表示学习中考虑三置信度的必要性。
(3)全局路径置信度似乎对实体预测的贡献不大。
这可能是由于噪声和有限的路径选择所造成的路径信息的不确定性和不完全性。
在参数分析中,我们发现在合理范围内提高路径置信度将提高实体预测的性能,同时损害KG噪声检测的性能。
考虑更长的、更好的道路将部分地解决这个问题。
4.5 三元组分类
三重分类的目的是根据不同的函数来预测测试集中的三元组是否正确,可以看作是一个二值分类任务。
由于训练集中的噪声会影响知识表示的构建,而测试集中产生的负三组不会影响知识表示的构建,因此三重分类也可以看作是测试集中较为简单的知识图噪声检测任务。
评估协议
由于现有的知识边图中没有显式的负三元组,我们按照[Socher et al., 2013]中的相同协议在验证和测试集中构造负三元组。
我们还保证生成的负三元组的数量应该与正三元组的数量相等。
分类方法如下:首先对每个关系学习不同的阈值点r,通过在验证集上最大程度地提高分类精度来优化。三联体r,将被归类为正,否则将被归类为负。
实验结果
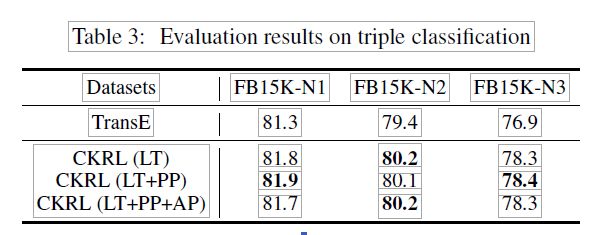
表3展示了三重分类的结果。我们可以观察到:(1)CKRL模型在所有数据集上的表现都优于基线,并且随着噪声比例的增加,改进的效果也越来越明显。验证了学习知识的三重置信度表示也有助于三重分类。(2)自信感知模型在该任务中超过基线的优势似乎小于KG噪声检测模型。这是因为CKRL模型更注重训练集中三元组的内部信息,而三元组分类的改进只能通过更好的知识表征来实现。虽然CKRL模型学习了更好的知识表示,传统的没有信心的模型也可以取得良好的结果。
5 结论与未来工作
在本文中,我们提出了一个新的CKRL模型,旨在检测知识图中的噪声,同时学习知识表示。为了使模型更加灵活和通用,我们只考虑KGs中的内部结构信息来定义局部三元组置信度和全局路径置信度。实验结果表明,我们的CKRL框架能够很好地捕获局部和全局结构信息来度量三重置信值,这对于检测KGs中的噪声和学习更好的知识表示是至关重要的。
未来我们将探索以下研究方向:(1)文本信息等外部信息可以为判断三元组置信度提供补充信息。我们将探索将外部异质信息与内部结构信息结合起来,以获得更好的三重信任。(2)研究如何将我们的信心感知框架与知识结构相结合,在联合消除可能的噪声的同时收集结构知识。