- Python爬虫实战:研究Korean库相关技术
ylfhpy
爬虫项目实战python爬虫easyuikorean
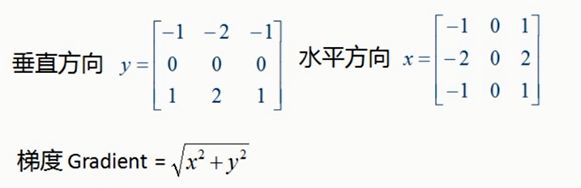
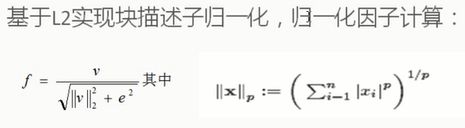
一、引言1.1研究背景与意义随着韩流文化在全球的传播,韩语网页内容急剧增加。韩国在科技、娱乐等领域的信息具有重要研究价值。然而,韩语独特的黏着语特性(如助词体系、词尾变化)给信息处理带来挑战。传统爬虫缺乏对韩语语言特点的针对性处理,本研究旨在开发一套完整的韩语网页内容分析系统,填补这一技术空白。1.2研究目标与方法研究目标:设计高效的韩语网页爬虫框架实现精准的韩语内容识别与处理构建多维度的韩语内容
- Python爬虫实战:研究Genius库相关技术
ylfhpy
爬虫项目实战python爬虫开发语言genius
1.引言在当今数字化时代,音乐数据的分析与挖掘成为了音乐学、计算机科学等领域的研究热点。歌词作为音乐的重要组成部分,蕴含着丰富的情感、文化和社会信息。通过对歌词数据的分析,可以揭示音乐风格的演变、流行趋势的变化以及社会情绪的波动等。Genius是一个专注于歌词解析与音乐知识分享的平台,拥有大量的歌词文本以及用户对歌词的注释和解读。Genius提供了API接口,允许开发者获取歌曲、艺术家和歌词等信息
- 【Python】通过注释插桩替换代码实现开源自动化
ChrisEighteen18
pythonpython
需求提出在特定的标签注释后写上开源后的代码实现开源替换答疑解惑调用如下的代码即可实现defreplace_java_code_in_one_line_by_tag(patch_file_path,update_java_code_line_tag):"""本方法对包含update_java_code_line_tag的之前本行内所有内容进行删除操作;适用于对java文件的代码替换,即在包含upda
- python量化实战_Python与量化投资 从基础到实战.pdf
weixin_39841709
python量化实战
作者:王小川出版发行:北京:电子工业出版社,2018.03ISBN号:978-7-121-33857-1页数:408原书定价:99.00开本:16开主题词:软件工具-程序设计-应用-投资中图法分类号:F830.59-39(经济->财政、金融->金融、银行->金融、银行理论)内容提要:本书主要讲解如何利用Python进行量化投资,包括对数据的获取、整理、分析挖掘、信号构建、策略构建、回测、策略分析等
- 【Grafana】Prometheus指标可视化Grafana,手把手教你如何自定义图形
景天科技苑
grafanaprometheusprometheus可视化grafana自定义图形手撕grafana自定义监控图形
✨✨欢迎大家来到景天科技苑✨✨养成好习惯,先赞后看哦~作者简介:景天科技苑《头衔》:大厂架构师,华为云开发者社区专家博主,阿里云开发者社区专家博主,CSDN全栈领域优质创作者,掘金优秀博主,51CTO博客专家等。《博客》:Python全栈,前后端开发,小程序开发,人工智能,js逆向,App逆向,网络系统安全,数据分析,Django,fastapi,flask等框架,云原生k8s,Prometheu
- Python量化实战:基于索提诺比率的价值投资策略回测
量化价值投资入门到精通
python网络开发语言ai
Python量化实战:基于索提诺比率的价值投资策略回测关键词:Python量化分析、索提诺比率、价值投资策略、回测框架、风险调整收益、下行风险、量化实战摘要:本文深入探讨如何利用Python构建基于索提诺比率(SortinoRatio)的价值投资策略,并通过完整的回测框架验证策略有效性。首先解析索提诺比率的数学原理与核心优势,对比传统夏普比率的差异;其次详细演示价值投资策略的构建步骤,包括低估值因
- Python+Allpairspy实战:高效正交法测试用例设计全攻略
聪明的一休哥哥
测试开发技术大全python测试用例自动化测试
引言:正交法的核心价值正交实验法是一种通过科学筛选参数组合来优化测试用例设计的技术。其核心思想是从所有可能的参数组合中,选择最具代表性的N个组合进行测试,既能显著减少用例数量(通常可减少30%-70%),又能保证覆盖关键场景。例如:传统全组合测试:3因素×3水平=27种组合正交法优化后:仅需4-9种组合即可覆盖核心场景1、Allpairspy库安装与基础使用1.1、安装命令pipinstallal
- Python 应用无监督学习(一)
绝不原创的飞龙
默认分类默认分类
原文:annas-archive.org/md5/6b15c463e64a9f03f0d968a77b424918译者:飞龙协议:CCBY-NC-SA4.0前言关于本节简要介绍了作者、本书的内容覆盖范围、开始时你需要的技术技能,以及完成所有活动和练习所需的硬件和软件要求。本书简介无监督学习是一种在没有标签数据的情况下非常有用且实用的解决方案。Python应用无监督学习引导你使用无监督学习技术与Py
- Python包高级开发技术:性能优化与系统集成
软考和人工智能学堂
Python开发经验深度学习强化学习python性能优化开发语言
引言掌握Python包的高级开发技术是构建工业级应用的关键。本文将深入探讨Python包的性能优化策略、C扩展开发、异步IO集成以及跨语言互操作等高级主题,帮助你将Python包提升到专业水平。1.性能优化技术1.1性能分析工具链#性能分析工具矩阵perf_tools={'cProfile':'标准库分析器,提供函数级耗时统计','line_profiler':'行级分析器,需要@profile装
- 2、Python 测试全攻略:自动化与驱动开发
辣条鉴定师
Python测试自动化测试测试驱动开发
Python测试全攻略:自动化与驱动开发1.测试的乐趣与收益编程过程中,测试常被视为徒劳或浪费时间的事。但实际上,测试可以变得轻松有趣且富有成效。比如回忆一下曾遇到的恼人bug,可能是数据库模式不匹配、数据结构错误等。若有一小段代码能在恰当时间捕捉到该bug并告知你,而所有代码都配有这样易执行的测试代码,那bug存活时间会大大缩短。基本思路是用简单易写的代码片段告知计算机期望结果,让计算机在编码过
- 华为OD机考2025B卷 - 表达式括号匹配(Java & Python& JS & C++ & C )
算法大师
最新华为OD机试真题华为OD机试真题(Java/JS/Py/C)华为odjavapythonjavascriptc++
最新华为OD机试真题目录:点击查看目录华为OD面试真题精选:点击立即查看2025华为od机试2025B卷-华为机考OD2025年B卷题目描述(1+(2+3)*(3+(8+0))+1-2)这是一个简单的数学表达式,今天不是计算它的值,而是比较它的括号匹配是否正确。前面这个式子可以简化为(()(()))这样的括号我们认为它是匹配正确的,而((())这样的我们就说他是错误的。注意括号里面的表达式可能是错
- SpringBoot单元测试全攻略:MockMVC+Testcontainers+覆盖率分析
fanxbl957
Webspringboot单元测试后端
博主介绍:Java、Python、js全栈开发“多面手”,精通多种编程语言和技术,痴迷于人工智能领域。秉持着对技术的热爱与执着,持续探索创新,愿在此分享交流和学习,与大家共进步。DeepSeek-行业融合之万象视界(附实战案例详解100+)全栈开发环境搭建运行攻略:多语言一站式指南(环境搭建+运行+调试+发布+保姆级详解)感兴趣的可以先收藏起来,希望帮助更多的人SpringBoot单元测试全攻略:
- Python.03
唯怡委员
python
1.技术面试题(1)解释Linux中的进程、线程和守护进程的概念,以及如何管理它们?答:进程是Linux中资源分配的基本单位,代表程序在内存中的执行实例,拥有独立的地址空间和系统资源。通过ps、top命令查看,kill命令终止,或使用systemctl管理服务进程。线程是进程内的轻量级执行单元,共享进程资源(如内存),切换开销小。Linux通过POSIX线程(pthread)库实现,可用htop查
- Python.01
唯怡委员
python
Python.011.技术面试题(1)TCP与UDP的区别是什么?(2)DHCP和DNS的作用是什么?(3)简述Linux文件系统的目录结构,其中/boot、/var、/usr目录的作用分别是什么?(4)Linux系统突然无法访问外网,但内网通信正常。请列出至少5个可能的故障点及排查步骤。2.HR面试题(1)假如你成功入职,却发现直属领导能力远不如你,你会如何与他共事?(2)你简历上的经历并不突出
- 【算法-贪心算法-python】柠檬水找零
檀越@新空间
P1算法与数据结构s1Python算法贪心算法python
欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。推荐:kuan的首页,持续学习,不断总结,共同进步,活到老学到老导航檀越剑指大厂系列:全面总结java核心技术点,如集合,jvm,并发编程redis,kafka,Spring,微服务,Netty等常用开发工具系列:罗列常用的开发工具,如IDEA,M
- python爬虫-国家企业信用信息公示系统_GitHub - yong771/Crack-JS: Python3爬虫项目进阶实战、JS加解密、逆向教程 - 犀牛数据 | 美团美食 | 企名片 | 七麦...
日向夕阳
Crack-JSPython3爬虫实战、JS加解密、逆向教程犀牛数据|美团美食|企名片|七麦数据|淘大象|梦幻西游藏宝阁|漫画柜|财联社|中国空气质量在线监测分析平台|66ip代理|零度ip|国家企业信用信息公示系统|中国产品大目录Author咸鱼微信公众号咸鱼学PythonIntroduce数据解密、反爬处理、逆向教程一、代码配套说明目录JS解密案例│├──lingduip//-----零度ip
- python pywebview + vue3 做桌面端
妃衣
python开发语言
pythonpywebview+vue3做桌面端Api.py#传给前端的api对象,定义了一个可以通过js调用退出当前应用的函数classApi:def__init__(self)->None:self._window=None#java运行的线程self.process=Nonedefset_process(self,_process):self.process=_processdefset_w
- python的pywebview库结合Flask和waitress开发桌面应用程序简介
czliutz
python笔记pythonflask开发语言
pywebview的用途与特点用途pywebview是一个轻量级Python库,用于创建桌面应用程序(GUI)。它通过嵌入Web浏览器组件(如Windows的Edge/IE、macOS的WebKit、Linux的GTKWebKit),允许开发者使用HTML/CSS/JavaScript构建界面,并用Python处理后端逻辑。这种方式结合了Web技术的灵活性和Python的强大功能,适合快速开发跨平
- python笔记day1
w的狗子啊
01.Holleword1.pycharm快捷键ctrl+/----添加或者取消注释ctrl+s----保存ctrl+c----复制ctrl+v----粘贴ctrl+n----新建ctrl+f----搜索ctrl+r----替换ctrl+z----撤销ctrl+shift+z-----反撤销ctrl+a----全选2.注意事项在程序中涉及到的所有和语法相关的符号,都是在英文输入法下对应的符号。实际
- 从文本到语音:使用 ElevenLabs 和 FFmpeg 实现语音合成与播放
曦紫沐
语音模型ffmpegElevenLabs语音合成
摘要在当今的人工智能时代,语音合成技术正变得越来越普及。ElevenLabs是一个强大的语音合成平台,能够生成高质量的语音音频。本文将详细介绍如何结合Python、ElevenLabsAPI和FFmpeg工具集,实现从文本到语音的转换,并通过ffplay播放生成的音频文件。同时,我们将解决常见的问题,如ffplay未找到或音频无法播放等。1.引言随着人工智能技术的发展,语音合成(Text-to-S
- Python就业薪资好不好,学Python工作机会多吗?
Python小辰
Python就业薪资好不好?学Python工作机会多吗?人工智能时代的来临让Python崭露头角,各大企业纷纷加大对相关人才的招聘力度吸引了很多人入行学习Python。近年来Python开发发展迅猛,吸引了很多科技公司入驻,且看小编的分析。Python薪资好不好?数据是最有力的答案。职友集统计数据显示,全国Python工程师的平均月资达19160,其中20-30K的工程师数量超过了四成。来自智联招
- PyCharm 高效入门指南:从安装到进阶,解锁 Python 开发全流程
作为Python开发者的利器,PyCharm的安装与配置是开启高效编程之旅的第一步。面对Community和Professional两个版本,该如何选择呢?Community版是免费开源的,适合初学者和简单项目开发,包含基础的Python开发功能;而Professional版虽收费,但功能更强大,支持Web开发、数据库连接等高级功能,适合专业开发者和复杂项目。1.安装与配置下载与安装下载PyCha
- 嵌入式知识篇---机械臂的运动学结算(简单2自由度)
Atticus-Orion
嵌入式知识篇上位机知识篇嵌入式硬件篇人工智能机械臂解算
机械臂的“解算”本质是运动学解算,核心是解决“关节角度”和“末端位置”的互转问题。下面用最通俗的方式解释,并结合2自由度平面机械臂(结构最简单,适合入门)给出Python和ESP32代码,以及参数细节。一、机械臂运动学解算的通俗原理想象你有一条“简化的手臂”:只有大臂和小臂两个关节(类似人类的上臂和前臂),只能在桌面(X-Y平面)内运动。正解:知道“大臂转30°,小臂转60°”,算出“手掌”的位置
- 老码农和你一起学AI:Python系列-Pandas 并行计算
chilavert318
熬之滴水穿石pandaspython
但凡用到科学计算,Pandas几乎是绕不开的工具——它以简洁的API、灵活的数据操作能力成为数据处理的“瑞士军刀”。但随着数据量增长(比如从10万行到1000万行),你可能会发现:原本流畅的代码突然变慢了,一个简单的apply操作要等好几分钟,读取大文件时进度条仿佛凝固了。这不是你的代码有问题,而是原生Pandas的“单线程”基因在多核时代遇到了瓶颈。并行计算正是解决这个问题的核心方案。简单来说,
- 老码农和你一起学AI:Python系列-Pandas大数据处理
chilavert318
熬之滴水穿石pandaspython
今天开始梳理一下pandas的大数据处理,在数据处理领域,Pandas凭借简洁的API和强大的功能成为Python开发者的首选工具。但当面对GB级甚至更大的数据集时,直接读取数据往往会触发“内存不足”的错误——这是因为Pandas默认将数据全部加载到内存中进行处理。此时,分块处理(Out-of-Core)技术就成为解决问题的关键。它通过将大文件拆分为小块,逐块加载并处理,最终整合结果,实现“用有限
- PYTHON日志神器nb_log详细介绍和使用说明
个人主页:云纳星辰怀自在座右铭:“所谓坚持,就是觉得还有希望!”Python的nb_log是一个功能强大且高度灵活的日志记录模块,基于Python内置的logging模块封装,解决了传统日志库的常见痛点(如重复打印、配置复杂等),并增加了多项创新特性。一、核心特性与优势智能print增强自动捕获所有print输出,添加文件名+行号标记(如[demo.py:18])支持IDE控制台点击跳转源码位置开
- 基于 Python 对于Nacos 服务订阅流程的深度剖析
chilavert318
熬之滴水穿石python开发语言nacos
记得去年在外省给某事业单位给科技处的领导作关于国产化微服务项目的汇报,该处长要我详细讲解一下Nacos的来龙去脉。我问他为什么要单独了解这块,他说现在国产化已经是趋势了,他其实也想深度的了解一下,这款产品是如何演化而来,希望通过了解该产品的来龙去脉深度思索一下,他所辖范围之内系统国产化的一些思路。记得当时我也是做足了工作,然后选择一个时间给他单独汇报,会后领导反响还不错,领导总结道:Nacos适应
- Python爬取网易云音乐歌手歌曲和歌单!推荐好听的歌吗?
爬遍天下无敌手
Pythonhttphttpspythonsslservlet
仅供学习参考Python爬取网易云音乐网易云音乐歌手歌曲和歌单,并下载到本地①找到要下载歌手歌曲的链接,这里用的是:https://music.163.com/#/artist?id=10559然后更改你要保存的目录,目录要先建立好文件夹,例如我的是保存在D盘-360下载-网易云热歌榜文件夹内,就可以完成下载。如果文件夹没有提前建好,会报错[Errno2]Nosuchfileordirectory
- python class是什么,python中的class是什么
1、概念用来描述具有相同的属性和方法的对象的集合。它定义了该集合中每个对象所共有的属性和方法。2、类定义的语法classClassName:...3、实例为了代码的编写方便简洁,引入了类的定义;一般,使用class语句来创建一个新类,class之后为类的名称(通常首字母大写)并以冒号结尾,例如:、classTicket():def__init__(self,checi,fstation,tstat
- Python中的模块和作用域
全新的饭
模块的定义模块是写有python源代码的文件(其中定义了一组函数和其他对象)或c、c++编译的对象文件模块名称就是文件名模块存在的意义(使用模块的好处)可通过使用模块避免名称冲突(两个模块中可定义相同名称的函数)模块使python代码更易于管理(标准python函数位于特殊模块而非语言核心中,因此用户可根据需要加载目标模块)添加自己的模块将自己的模块添加到sys中使之可以通过使用import导入(
- 数据采集高并发的架构应用
3golden
.net
问题的出发点:
最近公司为了发展需要,要扩大对用户的信息采集,每个用户的采集量估计约2W。如果用户量增加的话,将会大量照成采集量成3W倍的增长,但是又要满足日常业务需要,特别是指令要及时得到响应的频率次数远大于预期。
&n
- 不停止 MySQL 服务增加从库的两种方式
brotherlamp
linuxlinux视频linux资料linux教程linux自学
现在生产环境MySQL数据库是一主一从,由于业务量访问不断增大,故再增加一台从库。前提是不能影响线上业务使用,也就是说不能重启MySQL服务,为了避免出现其他情况,选择在网站访问量低峰期时间段操作。
一般在线增加从库有两种方式,一种是通过mysqldump备份主库,恢复到从库,mysqldump是逻辑备份,数据量大时,备份速度会很慢,锁表的时间也会很长。另一种是通过xtrabacku
- Quartz——SimpleTrigger触发器
eksliang
SimpleTriggerTriggerUtilsquartz
转载请出自出处:http://eksliang.iteye.com/blog/2208166 一.概述
SimpleTrigger触发器,当且仅需触发一次或者以固定时间间隔周期触发执行;
二.SimpleTrigger的构造函数
SimpleTrigger(String name, String group):通过该构造函数指定Trigger所属组和名称;
Simpl
- Informatica应用(1)
18289753290
sqlworkflowlookup组件Informatica
1.如果要在workflow中调用shell脚本有一个command组件,在里面设置shell的路径;调度wf可以右键出现schedule,现在用的是HP的tidal调度wf的执行。
2.designer里面的router类似于SSIS中的broadcast(多播组件);Reset_Workflow_Var:参数重置 (比如说我这个参数初始是1在workflow跑得过程中变成了3我要在结束时还要
- python 获取图片验证码中文字
酷的飞上天空
python
根据现成的开源项目 http://code.google.com/p/pytesser/改写
在window上用easy_install安装不上 看了下源码发现代码很少 于是就想自己改写一下
添加支持网络图片的直接解析
#coding:utf-8
#import sys
#reload(sys)
#sys.s
- AJAX
永夜-极光
Ajax
1.AJAX功能:动态更新页面,减少流量消耗,减轻服务器负担
2.代码结构:
<html>
<head>
<script type="text/javascript">
function loadXMLDoc()
{
.... AJAX script goes here ...
- 创业OR读研
随便小屋
创业
现在研一,有种想创业的想法,不知道该不该去实施。因为对于的我情况这两者是矛盾的,可能就是鱼与熊掌不能兼得。
研一的生活刚刚过去两个月,我们学校主要的是
- 需求做得好与坏直接关系着程序员生活质量
aijuans
IT 生活
这个故事还得从去年换工作的事情说起,由于自己不太喜欢第一家公司的环境我选择了换一份工作。去年九月份我入职现在的这家公司,专门从事金融业内软件的开发。十一月份我们整个项目组前往北京做现场开发,从此苦逼的日子开始了。
系统背景:五月份就有同事前往甲方了解需求一直到6月份,后续几个月也完
- 如何定义和区分高级软件开发工程师
aoyouzi
在软件开发领域,高级开发工程师通常是指那些编写代码超过 3 年的人。这些人可能会被放到领导的位置,但经常会产生非常糟糕的结果。Matt Briggs 是一名高级开发工程师兼 Scrum 管理员。他认为,单纯使用年限来划分开发人员存在问题,两个同样具有 10 年开发经验的开发人员可能大不相同。近日,他发表了一篇博文,根据开发者所能发挥的作用划分软件开发工程师的成长阶段。
初
- Servlet的请求与响应
百合不是茶
servletget提交java处理post提交
Servlet是tomcat中的一个重要组成,也是负责客户端和服务端的中介
1,Http的请求方式(get ,post);
客户端的请求一般都会都是Servlet来接受的,在接收之前怎么来确定是那种方式提交的,以及如何反馈,Servlet中有相应的方法, http的get方式 servlet就是都doGet(
- web.xml配置详解之listener
bijian1013
javaweb.xmllistener
一.定义
<listener>
<listen-class>com.myapp.MyListener</listen-class>
</listener>
二.作用 该元素用来注册一个监听器类。可以收到事件什么时候发生以及用什么作为响
- Web页面性能优化(yahoo技术)
Bill_chen
JavaScriptAjaxWebcssYahoo
1.尽可能的减少HTTP请求数 content
2.使用CDN server
3.添加Expires头(或者 Cache-control) server
4.Gzip 组件 server
5.把CSS样式放在页面的上方。 css
6.将脚本放在底部(包括内联的) javascript
7.避免在CSS中使用Expressions css
8.将javascript和css独立成外部文
- 【MongoDB学习笔记八】MongoDB游标、分页查询、查询结果排序
bit1129
mongodb
游标
游标,简单的说就是一个查询结果的指针。游标作为数据库的一个对象,使用它是包括
声明
打开
循环抓去一定数目的文档直到结果集中的所有文档已经抓取完
关闭游标
游标的基本用法,类似于JDBC的ResultSet(hasNext判断是否抓去完,next移动游标到下一条文档),在获取一个文档集时,可以提供一个类似JDBC的FetchSize
- ORA-12514 TNS 监听程序当前无法识别连接描述符中请求服务 的解决方法
白糖_
ORA-12514
今天通过Oracle SQL*Plus连接远端服务器的时候提示“监听程序当前无法识别连接描述符中请求服务”,遂在网上找到了解决方案:
①打开Oracle服务器安装目录\NETWORK\ADMIN\listener.ora文件,你会看到如下信息:
# listener.ora Network Configuration File: D:\database\Oracle\net
- Eclipse 问题 A resource exists with a different case
bozch
eclipse
在使用Eclipse进行开发的时候,出现了如下的问题:
Description Resource Path Location TypeThe project was not built due to "A resource exists with a different case: '/SeenTaoImp_zhV2/bin/seentao'.&
- 编程之美-小飞的电梯调度算法
bylijinnan
编程之美
public class AptElevator {
/**
* 编程之美 小飞 电梯调度算法
* 在繁忙的时间,每次电梯从一层往上走时,我们只允许电梯停在其中的某一层。
* 所有乘客都从一楼上电梯,到达某层楼后,电梯听下来,所有乘客再从这里爬楼梯到自己的目的层。
* 在一楼时,每个乘客选择自己的目的层,电梯则自动计算出应停的楼层。
* 问:电梯停在哪
- SQL注入相关概念
chenbowen00
sqlWeb安全
SQL Injection:就是通过把SQL命令插入到Web表单递交或输入域名或页面请求的查询字符串,最终达到欺骗服务器执行恶意的SQL命令。
具体来说,它是利用现有应用程序,将(恶意)的SQL命令注入到后台数据库引擎执行的能力,它可以通过在Web表单中输入(恶意)SQL语句得到一个存在安全漏洞的网站上的数据库,而不是按照设计者意图去执行SQL语句。
首先让我们了解什么时候可能发生SQ
- [光与电]光子信号战防御原理
comsci
原理
无论是在战场上,还是在后方,敌人都有可能用光子信号对人体进行控制和攻击,那么采取什么样的防御方法,最简单,最有效呢?
我们这里有几个山寨的办法,可能有些作用,大家如果有兴趣可以去实验一下
根据光
- oracle 11g新特性:Pending Statistics
daizj
oracledbms_stats
oracle 11g新特性:Pending Statistics 转
从11g开始,表与索引的统计信息收集完毕后,可以选择收集的统信息立即发布,也可以选择使新收集的统计信息处于pending状态,待确定处于pending状态的统计信息是安全的,再使处于pending状态的统计信息发布,这样就会避免一些因为收集统计信息立即发布而导致SQL执行计划走错的灾难。
在 11g 之前的版本中,D
- 快速理解RequireJs
dengkane
jqueryrequirejs
RequireJs已经流行很久了,我们在项目中也打算使用它。它提供了以下功能:
声明不同js文件之间的依赖
可以按需、并行、延时载入js库
可以让我们的代码以模块化的方式组织
初看起来并不复杂。 在html中引入requirejs
在HTML中,添加这样的 <script> 标签:
<script src="/path/to
- C语言学习四流程控制if条件选择、for循环和强制类型转换
dcj3sjt126com
c
# include <stdio.h>
int main(void)
{
int i, j;
scanf("%d %d", &i, &j);
if (i > j)
printf("i大于j\n");
else
printf("i小于j\n");
retu
- dictionary的使用要注意
dcj3sjt126com
IO
NSDictionary *dict = [NSDictionary dictionaryWithObjectsAndKeys:
user.user_id , @"id",
user.username , @"username",
- Android 中的资源访问(Resource)
finally_m
xmlandroidStringdrawablecolor
简单的说,Android中的资源是指非代码部分。例如,在我们的Android程序中要使用一些图片来设置界面,要使用一些音频文件来设置铃声,要使用一些动画来显示特效,要使用一些字符串来显示提示信息。那么,这些图片、音频、动画和字符串等叫做Android中的资源文件。
在Eclipse创建的工程中,我们可以看到res和assets两个文件夹,是用来保存资源文件的,在assets中保存的一般是原生
- Spring使用Cache、整合Ehcache
234390216
springcacheehcache@Cacheable
Spring使用Cache
从3.1开始,Spring引入了对Cache的支持。其使用方法和原理都类似于Spring对事务管理的支持。Spring Cache是作用在方法上的,其核心思想是这样的:当我们在调用一个缓存方法时会把该方法参数和返回结果作为一个键值对存放在缓存中,等到下次利用同样的
- 当druid遇上oracle blob(clob)
jackyrong
oracle
http://blog.csdn.net/renfufei/article/details/44887371
众所周知,Oracle有很多坑, 所以才有了去IOE。
在使用Druid做数据库连接池后,其实偶尔也会碰到小坑,这就是使用开源项目所必须去填平的。【如果使用不开源的产品,那就不是坑,而是陷阱了,你都不知道怎么去填坑】
用Druid连接池,通过JDBC往Oracle数据库的
- easyui datagrid pagination获得分页页码、总页数等信息
ldzyz007
var grid = $('#datagrid');
var options = grid.datagrid('getPager').data("pagination").options;
var curr = options.pageNumber;
var total = options.total;
var max =
- 浅析awk里的数组
nigelzeng
二维数组array数组awk
awk绝对是文本处理中的神器,它本身也是一门编程语言,还有许多功能本人没有使用到。这篇文章就单单针对awk里的数组来进行讨论,如何利用数组来帮助完成文本分析。
有这么一组数据:
abcd,91#31#2012-12-31 11:24:00
case_a,136#19#2012-12-31 11:24:00
case_a,136#23#2012-12-31 1
- 搭建 CentOS 6 服务器(6) - TigerVNC
rensanning
centos
安装GNOME桌面环境
# yum groupinstall "X Window System" "Desktop"
安装TigerVNC
# yum -y install tigervnc-server tigervnc
启动VNC服务
# /etc/init.d/vncserver restart
# vncser
- Spring 数据库连接整理
tomcat_oracle
springbeanjdbc
1、数据库连接jdbc.properties配置详解 jdbc.url=jdbc:hsqldb:hsql://localhost/xdb jdbc.username=sa jdbc.password= jdbc.driver=不同的数据库厂商驱动,此处不一一列举 接下来,详细配置代码如下:
Spring连接池
- Dom4J解析使用xpath java.lang.NoClassDefFoundError: org/jaxen/JaxenException异常
xp9802
用Dom4J解析xml,以前没注意,今天使用dom4j包解析xml时在xpath使用处报错
异常栈:java.lang.NoClassDefFoundError: org/jaxen/JaxenException异常
导入包 jaxen-1.1-beta-6.jar 解决;
&nb