linux驱动 8. SPI驱动
0.简介
SPI也是嵌入式设备经常用到的一种总线,它采用主从架构,也可以全双工通讯。今天我们来分析一下SPI在linux中的驱动。
software:linux 4.14.98
hardware: imx8
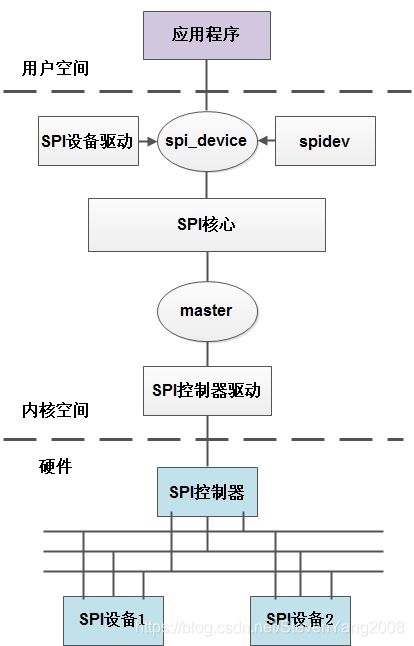
和I2C驱动有些类似。SPI的驱动大致可以分为三部分。
1.SPI设备驱动部分
2.SPI核心层部分
3.SPI控制器驱动部分
摘录网络上面一张图,如下图所示
1.SPI控制器驱动
在这里先分析一下SPI控制器驱动给,下面看代码。
FILE:drivers/spi/spi-imx.c
static SIMPLE_DEV_PM_OPS(imx_spi_pm, spi_imx_suspend, spi_imx_resume);
#define IMX_SPI_PM (&imx_spi_pm)
#else
#define IMX_SPI_PM NULL
#endif
static struct platform_driver spi_imx_driver = {
.driver = {
.name = DRIVER_NAME,
.of_match_table = spi_imx_dt_ids,
.pm = IMX_SPI_PM,
},
.id_table = spi_imx_devtype,
.probe = spi_imx_probe,
.remove = spi_imx_remove,
};
module_platform_driver(spi_imx_driver);
其中spi_imx_dt_ids定义如下:
static const struct of_device_id spi_imx_dt_ids[] = {
{ .compatible = "fsl,imx1-cspi", .data = &imx1_cspi_devtype_data, },
{ .compatible = "fsl,imx21-cspi", .data = &imx21_cspi_devtype_data, },
{ .compatible = "fsl,imx27-cspi", .data = &imx27_cspi_devtype_data, },
{ .compatible = "fsl,imx31-cspi", .data = &imx31_cspi_devtype_data, },
{ .compatible = "fsl,imx35-cspi", .data = &imx35_cspi_devtype_data, },
{ .compatible = "fsl,imx51-ecspi", .data = &imx51_ecspi_devtype_data, },
{ .compatible = "fsl,imx53-ecspi", .data = &imx53_ecspi_devtype_data, },
{ .compatible = "fsl,imx6ul-ecspi", .data = &imx6ul_ecspi_devtype_data, },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, spi_imx_dt_ids);
spi_imx_devtype 定义如下:
static struct platform_device_id spi_imx_devtype[] = {
{
.name = "imx1-cspi",
.driver_data = (kernel_ulong_t) &imx1_cspi_devtype_data,
}, {
.name = "imx21-cspi",
.driver_data = (kernel_ulong_t) &imx21_cspi_devtype_data,
}, {
.name = "imx27-cspi",
.driver_data = (kernel_ulong_t) &imx27_cspi_devtype_data,
}, {
.name = "imx31-cspi",
.driver_data = (kernel_ulong_t) &imx31_cspi_devtype_data,
}, {
.name = "imx35-cspi",
.driver_data = (kernel_ulong_t) &imx35_cspi_devtype_data,
}, {
.name = "imx51-ecspi",
.driver_data = (kernel_ulong_t) &imx51_ecspi_devtype_data,
}, {
.name = "imx53-ecspi",
.driver_data = (kernel_ulong_t) &imx53_ecspi_devtype_data,
}, {
.name = "imx6ul-ecspi",
.driver_data = (kernel_ulong_t) &imx6ul_ecspi_devtype_data,
}, {
/* sentinel */
}
};
在这里我们重点看一下spi_imx_probe函数
static int spi_imx_probe(struct platform_device *pdev)
{
struct device_node *np = pdev->dev.of_node;
const struct of_device_id *of_id =
of_match_device(spi_imx_dt_ids, &pdev->dev);
struct spi_imx_master *mxc_platform_info =
dev_get_platdata(&pdev->dev);
struct spi_master *master;
struct spi_imx_data *spi_imx;
struct resource *res;
int i, ret, irq, spi_drctl, num_cs;
const struct spi_imx_devtype_data *devtype_data = of_id ? of_id->data :
(struct spi_imx_devtype_data *)pdev->id_entry->driver_data;
bool slave_mode;
if (!np && !mxc_platform_info) {
dev_err(&pdev->dev, "can't get the platform data\n");
return -EINVAL;
}
slave_mode = devtype_data->has_slavemode &&
of_property_read_bool(np, "spi-slave");
if (slave_mode)
master = spi_alloc_slave(&pdev->dev,
sizeof(struct spi_imx_data));
else
master = spi_alloc_master(&pdev->dev,
sizeof(struct spi_imx_data));
if (!master)
return -ENOMEM;
ret = of_property_read_u32(np, "fsl,spi-rdy-drctl", &spi_drctl);
if ((ret < 0) || (spi_drctl >= 0x3)) {
/* '11' is reserved */
spi_drctl = 0;
}
platform_set_drvdata(pdev, master);
master->bits_per_word_mask = SPI_BPW_RANGE_MASK(1, 32);
master->bus_num = np ? -1 : pdev->id;
ret = of_property_read_u32(np, "fsl,spi-num-chipselects", &num_cs);
if (ret < 0) {
if (mxc_platform_info) {
num_cs = mxc_platform_info->num_chipselect;
master->num_chipselect = num_cs;
}
} else {
master->num_chipselect = num_cs;
}
spi_imx = spi_master_get_devdata(master);
spi_imx->bitbang.master = master;
spi_imx->dev = &pdev->dev;
spi_imx->slave_mode = slave_mode;
spi_imx->devtype_data = devtype_data;
master->cs_gpios = devm_kzalloc(&master->dev,
sizeof(int) * master->num_chipselect, GFP_KERNEL);
if (!spi_imx->slave_mode) {
if (!master->cs_gpios) {
dev_err(&pdev->dev, "No CS GPIOs available\n");
ret = -EINVAL;
goto out_master_put;
}
for (i = 0; i < master->num_chipselect; i++) {
int cs_gpio = of_get_named_gpio(np, "cs-gpios", i);
if (!gpio_is_valid(cs_gpio) && mxc_platform_info)
cs_gpio = mxc_platform_info->chipselect[i];
master->cs_gpios[i] = cs_gpio;
if (!gpio_is_valid(cs_gpio))
continue;
ret = devm_gpio_request(&pdev->dev, master->cs_gpios[i],
DRIVER_NAME);
if (ret) {
dev_err(&pdev->dev, "Can't get CS GPIO %i\n",
master->cs_gpios[i]);
goto out_master_put;
}
}
}
spi_imx->bitbang.chipselect = spi_imx_chipselect;
spi_imx->bitbang.setup_transfer = spi_imx_setupxfer;
spi_imx->bitbang.txrx_bufs = spi_imx_transfer;
spi_imx->bitbang.master->setup = spi_imx_setup;
spi_imx->bitbang.master->cleanup = spi_imx_cleanup;
spi_imx->bitbang.master->prepare_message = spi_imx_prepare_message;
spi_imx->bitbang.master->unprepare_message = spi_imx_unprepare_message;
spi_imx->bitbang.master->slave_abort = spi_imx_slave_abort;
spi_imx->bitbang.master->mode_bits = SPI_CPOL | SPI_CPHA | SPI_CS_HIGH \
| SPI_NO_CS;
if (is_imx35_cspi(spi_imx) || is_imx51_ecspi(spi_imx) ||
is_imx53_ecspi(spi_imx))
spi_imx->bitbang.master->mode_bits |= SPI_LOOP | SPI_READY;
spi_imx->spi_drctl = spi_drctl;
init_completion(&spi_imx->xfer_done);
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
spi_imx->base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(spi_imx->base)) {
ret = PTR_ERR(spi_imx->base);
goto out_master_put;
}
spi_imx->base_phys = res->start;
irq = platform_get_irq(pdev, 0);
if (irq < 0) {
ret = irq;
goto out_master_put;
}
ret = devm_request_irq(&pdev->dev, irq, spi_imx_isr, 0,
dev_name(&pdev->dev), spi_imx);
if (ret) {
dev_err(&pdev->dev, "can't get irq%d: %d\n", irq, ret);
goto out_master_put;
}
spi_imx->clk_ipg = devm_clk_get(&pdev->dev, "ipg");
if (IS_ERR(spi_imx->clk_ipg)) {
ret = PTR_ERR(spi_imx->clk_ipg);
goto out_master_put;
}
spi_imx->clk_per = devm_clk_get(&pdev->dev, "per");
if (IS_ERR(spi_imx->clk_per)) {
ret = PTR_ERR(spi_imx->clk_per);
goto out_master_put;
}
ret = clk_prepare_enable(spi_imx->clk_per);
if (ret)
goto out_master_put;
ret = clk_prepare_enable(spi_imx->clk_ipg);
if (ret)
goto out_put_per;
spi_imx->spi_clk = clk_get_rate(spi_imx->clk_per);
/*
* Only validated on i.mx35 and i.mx6 now, can remove the constraint
* if validated on other chips.
*/
if (spi_imx->devtype_data->has_dmamode) {
ret = spi_imx_sdma_init(&pdev->dev, spi_imx, master);
if (ret == -EPROBE_DEFER)
goto out_clk_put;
if (ret < 0)
dev_err(&pdev->dev, "dma setup error %d, use pio\n",
ret);
}
spi_imx->devtype_data->reset(spi_imx);
spi_imx->devtype_data->intctrl(spi_imx, 0);
master->dev.of_node = pdev->dev.of_node;
ret = spi_bitbang_start(&spi_imx->bitbang);
if (ret) {
dev_err(&pdev->dev, "bitbang start failed with %d\n", ret);
goto out_clk_put;
}
dev_info(&pdev->dev, "probed\n");
clk_disable_unprepare(spi_imx->clk_ipg);
clk_disable_unprepare(spi_imx->clk_per);
return ret;
out_clk_put:
clk_disable_unprepare(spi_imx->clk_ipg);
out_put_per:
clk_disable_unprepare(spi_imx->clk_per);
out_master_put:
spi_master_put(master);
return ret;
}
在这个probe里面比较重要的是*struct spi_master master,这个变量。这个是核心层识别的控制器对象。后面的工作大部分都围绕着它展开。
我们追踪下 函数spi_bitbang_start(&spi_imx->bitbang),其定义如下:
/*----------------------------------------------------------------------*/
/**
* spi_bitbang_start - start up a polled/bitbanging SPI master driver
* @bitbang: driver handle
*
* Caller should have zero-initialized all parts of the structure, and then
* provided callbacks for chip selection and I/O loops. If the master has
* a transfer method, its final step should call spi_bitbang_transfer; or,
* that's the default if the transfer routine is not initialized. It should
* also set up the bus number and number of chipselects.
*
* For i/o loops, provide callbacks either per-word (for bitbanging, or for
* hardware that basically exposes a shift register) or per-spi_transfer
* (which takes better advantage of hardware like fifos or DMA engines).
*
* Drivers using per-word I/O loops should use (or call) spi_bitbang_setup,
* spi_bitbang_cleanup and spi_bitbang_setup_transfer to handle those spi
* master methods. Those methods are the defaults if the bitbang->txrx_bufs
* routine isn't initialized.
*
* This routine registers the spi_master, which will process requests in a
* dedicated task, keeping IRQs unblocked most of the time. To stop
* processing those requests, call spi_bitbang_stop().
*
* On success, this routine will take a reference to master. The caller is
* responsible for calling spi_bitbang_stop() to decrement the reference and
* spi_master_put() as counterpart of spi_alloc_master() to prevent a memory
* leak.
*/
int spi_bitbang_start(struct spi_bitbang *bitbang)
{
struct spi_master *master = bitbang->master;
int ret;
if (!master || !bitbang->chipselect)
return -EINVAL;
mutex_init(&bitbang->lock);
if (!master->mode_bits)
master->mode_bits = SPI_CPOL | SPI_CPHA | bitbang->flags;
if (master->transfer || master->transfer_one_message)
return -EINVAL;
master->prepare_transfer_hardware = spi_bitbang_prepare_hardware;
master->unprepare_transfer_hardware = spi_bitbang_unprepare_hardware;
master->transfer_one = spi_bitbang_transfer_one;
master->set_cs = spi_bitbang_set_cs;
if (!bitbang->txrx_bufs) {
bitbang->use_dma = 0;
bitbang->txrx_bufs = spi_bitbang_bufs;
if (!master->setup) {
if (!bitbang->setup_transfer)
bitbang->setup_transfer =
spi_bitbang_setup_transfer;
master->setup = spi_bitbang_setup;
master->cleanup = spi_bitbang_cleanup;
}
}
/* driver may get busy before register() returns, especially
* if someone registered boardinfo for devices
*/
ret = spi_register_master(spi_master_get(master));
if (ret)
spi_master_put(master);
return 0;
}
EXPORT_SYMBOL_GPL(spi_bitbang_start);
在spi_bitbang_start中会调用 spi_register_master(spi_master_get(master)),将master注册到核心层。下面我们说一下核心层。
2.核心层
承接上一节,下面先说一下核心层的spi_register_master函数,定义如下:
#define spi_register_master(_ctlr) spi_register_controller(_ctlr)
....................................
/**
* spi_register_controller - register SPI master or slave controller
* @ctlr: initialized master, originally from spi_alloc_master() or
* spi_alloc_slave()
* Context: can sleep
*
* SPI controllers connect to their drivers using some non-SPI bus,
* such as the platform bus. The final stage of probe() in that code
* includes calling spi_register_controller() to hook up to this SPI bus glue.
*
* SPI controllers use board specific (often SOC specific) bus numbers,
* and board-specific addressing for SPI devices combines those numbers
* with chip select numbers. Since SPI does not directly support dynamic
* device identification, boards need configuration tables telling which
* chip is at which address.
*
* This must be called from context that can sleep. It returns zero on
* success, else a negative error code (dropping the controller's refcount).
* After a successful return, the caller is responsible for calling
* spi_unregister_controller().
*
* Return: zero on success, else a negative error code.
*/
int spi_register_controller(struct spi_controller *ctlr)
{
struct device *dev = ctlr->dev.parent;
struct boardinfo *bi;
int status = -ENODEV;
int id, first_dynamic;
if (!dev)
return -ENODEV;
if (!spi_controller_is_slave(ctlr)) {
status = of_spi_register_master(ctlr);
if (status)
return status;
}
/* even if it's just one always-selected device, there must
* be at least one chipselect
*/
if (ctlr->num_chipselect == 0)
return -EINVAL;
if (ctlr->bus_num >= 0) {
/* devices with a fixed bus num must check-in with the num */
mutex_lock(&board_lock);
id = idr_alloc(&spi_master_idr, ctlr, ctlr->bus_num,
ctlr->bus_num + 1, GFP_KERNEL);
mutex_unlock(&board_lock);
if (WARN(id < 0, "couldn't get idr"))
return id == -ENOSPC ? -EBUSY : id;
ctlr->bus_num = id;
} else if (ctlr->dev.of_node) {
/* allocate dynamic bus number using Linux idr */
id = of_alias_get_id(ctlr->dev.of_node, "spi");
if (id >= 0) {
ctlr->bus_num = id;
mutex_lock(&board_lock);
id = idr_alloc(&spi_master_idr, ctlr, ctlr->bus_num,
ctlr->bus_num + 1, GFP_KERNEL);
mutex_unlock(&board_lock);
if (WARN(id < 0, "couldn't get idr"))
return id == -ENOSPC ? -EBUSY : id;
}
}
if (ctlr->bus_num < 0) {
first_dynamic = of_alias_get_highest_id("spi");
if (first_dynamic < 0)
first_dynamic = 0;
else
first_dynamic++;
mutex_lock(&board_lock);
id = idr_alloc(&spi_master_idr, ctlr, first_dynamic,
0, GFP_KERNEL);
mutex_unlock(&board_lock);
if (WARN(id < 0, "couldn't get idr"))
return id;
ctlr->bus_num = id;
}
INIT_LIST_HEAD(&ctlr->queue);
spin_lock_init(&ctlr->queue_lock);
spin_lock_init(&ctlr->bus_lock_spinlock);
mutex_init(&ctlr->bus_lock_mutex);
mutex_init(&ctlr->io_mutex);
ctlr->bus_lock_flag = 0;
init_completion(&ctlr->xfer_completion);
if (!ctlr->max_dma_len)
ctlr->max_dma_len = INT_MAX;
/* register the device, then userspace will see it.
* registration fails if the bus ID is in use.
*/
dev_set_name(&ctlr->dev, "spi%u", ctlr->bus_num);
status = device_add(&ctlr->dev);
if (status < 0) {
/* free bus id */
mutex_lock(&board_lock);
idr_remove(&spi_master_idr, ctlr->bus_num);
mutex_unlock(&board_lock);
goto done;
}
dev_dbg(dev, "registered %s %s\n",
spi_controller_is_slave(ctlr) ? "slave" : "master",
dev_name(&ctlr->dev));
/* If we're using a queued driver, start the queue */
if (ctlr->transfer)
dev_info(dev, "controller is unqueued, this is deprecated\n");
else {
status = spi_controller_initialize_queue(ctlr);
if (status) {
device_del(&ctlr->dev);
/* free bus id */
mutex_lock(&board_lock);
idr_remove(&spi_master_idr, ctlr->bus_num);
mutex_unlock(&board_lock);
goto done;
}
}
/* add statistics */
spin_lock_init(&ctlr->statistics.lock);
mutex_lock(&board_lock);
list_add_tail(&ctlr->list, &spi_controller_list);
list_for_each_entry(bi, &board_list, list)
spi_match_controller_to_boardinfo(ctlr, &bi->board_info);
mutex_unlock(&board_lock);
/* Register devices from the device tree and ACPI */
of_register_spi_devices(ctlr);
acpi_register_spi_devices(ctlr);
done:
return status;
}
EXPORT_SYMBOL_GPL(spi_register_controller);
我们追踪一下函数spi_match_controller_to_boardinfo(ctlr, &bi->board_info),这个会将match的设备添加到总线上去。下面看其定义:
static void spi_match_controller_to_boardinfo(struct spi_controller *ctlr,
struct spi_board_info *bi)
{
struct spi_device *dev;
if (ctlr->bus_num != bi->bus_num)
return;
dev = spi_new_device(ctlr, bi);
if (!dev)
dev_err(ctlr->dev.parent, "can't create new device for %s\n",
bi->modalias);
}
继续追踪spi_new_device(ctlr, bi),定义如下:
/**
* spi_new_device - instantiate one new SPI device
* @ctlr: Controller to which device is connected
* @chip: Describes the SPI device
* Context: can sleep
*
* On typical mainboards, this is purely internal; and it's not needed
* after board init creates the hard-wired devices. Some development
* platforms may not be able to use spi_register_board_info though, and
* this is exported so that for example a USB or parport based adapter
* driver could add devices (which it would learn about out-of-band).
*
* Return: the new device, or NULL.
*/
struct spi_device *spi_new_device(struct spi_controller *ctlr,
struct spi_board_info *chip)
{
struct spi_device *proxy;
int status;
/* NOTE: caller did any chip->bus_num checks necessary.
*
* Also, unless we change the return value convention to use
* error-or-pointer (not NULL-or-pointer), troubleshootability
* suggests syslogged diagnostics are best here (ugh).
*/
proxy = spi_alloc_device(ctlr);
if (!proxy)
return NULL;
WARN_ON(strlen(chip->modalias) >= sizeof(proxy->modalias));
proxy->chip_select = chip->chip_select;
proxy->max_speed_hz = chip->max_speed_hz;
proxy->mode = chip->mode;
proxy->irq = chip->irq;
strlcpy(proxy->modalias, chip->modalias, sizeof(proxy->modalias));
proxy->dev.platform_data = (void *) chip->platform_data;
proxy->controller_data = chip->controller_data;
proxy->controller_state = NULL;
if (chip->properties) {
status = device_add_properties(&proxy->dev, chip->properties);
if (status) {
dev_err(&ctlr->dev,
"failed to add properties to '%s': %d\n",
chip->modalias, status);
goto err_dev_put;
}
}
status = spi_add_device(proxy);
if (status < 0)
goto err_remove_props;
return proxy;
err_remove_props:
if (chip->properties)
device_remove_properties(&proxy->dev);
err_dev_put:
spi_dev_put(proxy);
return NULL;
}
EXPORT_SYMBOL_GPL(spi_new_device);
最终调用 spi_add_device()函数进行添加。
核心层的文件是:drivers/spi/spi.c
在这里我们看spi_init()函数。
static int __init spi_init(void)
{
int status;
buf = kmalloc(SPI_BUFSIZ, GFP_KERNEL);
if (!buf) {
status = -ENOMEM;
goto err0;
}
status = bus_register(&spi_bus_type);
if (status < 0)
goto err1;
status = class_register(&spi_master_class);
if (status < 0)
goto err2;
if (IS_ENABLED(CONFIG_SPI_SLAVE)) {
status = class_register(&spi_slave_class);
if (status < 0)
goto err3;
}
if (IS_ENABLED(CONFIG_OF_DYNAMIC))
WARN_ON(of_reconfig_notifier_register(&spi_of_notifier));
if (IS_ENABLED(CONFIG_ACPI))
WARN_ON(acpi_reconfig_notifier_register(&spi_acpi_notifier));
return 0;
err3:
class_unregister(&spi_master_class);
err2:
bus_unregister(&spi_bus_type);
err1:
kfree(buf);
buf = NULL;
err0:
return status;
}
注意函数bus_register(&spi_bus_type),这个就是注册SPI总线。
spi_bus_type定义如下:
struct bus_type spi_bus_type = {
.name = "spi",
.dev_groups = spi_dev_groups,
.match = spi_match_device,
.uevent = spi_uevent,
};
EXPORT_SYMBOL_GPL(spi_bus_type);
还有函数class_register(&spi_master_class),这个是注册一个spi master 类,注册到核心层的spi控制器都属于这个class。核心层还有很多其他的函数,在这里我们就分析这么多,以后有时间在详解其他的。接下来我们说一下SPI设备驱动。
3. SPI设备驱动
SPI设备驱动我们以linux中提供的通用的为例。函数实现在文件:drivers/spi/spidev.c
我们先来看一下init函数,定义如下:
static int __init spidev_init(void)
{
int status;
/* Claim our 256 reserved device numbers. Then register a class
* that will key udev/mdev to add/remove /dev nodes. Last, register
* the driver which manages those device numbers.
*/
BUILD_BUG_ON(N_SPI_MINORS > 256);
status = register_chrdev(SPIDEV_MAJOR, "spi", &spidev_fops);
if (status < 0)
return status;
spidev_class = class_create(THIS_MODULE, "spidev");
if (IS_ERR(spidev_class)) {
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
return PTR_ERR(spidev_class);
}
status = spi_register_driver(&spidev_spi_driver);
if (status < 0) {
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
return status;
}
module_init(spidev_init);
static void __exit spidev_exit(void)
{
spi_unregister_driver(&spidev_spi_driver);
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
module_exit(spidev_exit);
spidev_spi_driver定义如下:
static struct spi_driver spidev_spi_driver = {
.driver = {
.name = "spidev",
.of_match_table = of_match_ptr(spidev_dt_ids),
.acpi_match_table = ACPI_PTR(spidev_acpi_ids),
},
.probe = spidev_probe,
.remove = spidev_remove,
/* NOTE: suspend/resume methods are not necessary here.
* We don't do anything except pass the requests to/from
* the underlying controller. The refrigerator handles
* most issues; the controller driver handles the rest.
*/
};
spidev_fops 定义如下:
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};
spidev_init()中,注册字符设备,并且在核心层注册SPI设备驱动。
我们再来看probe函数
static int spidev_probe(struct spi_device *spi)
{
struct spidev_data *spidev;
int status;
unsigned long minor;
/*
* spidev should never be referenced in DT without a specific
* compatible string, it is a Linux implementation thing
* rather than a description of the hardware.
*/
if (spi->dev.of_node && !of_match_device(spidev_dt_ids, &spi->dev)) {
dev_err(&spi->dev, "buggy DT: spidev listed directly in DT\n");
WARN_ON(spi->dev.of_node &&
!of_match_device(spidev_dt_ids, &spi->dev));
}
spidev_probe_acpi(spi);
/* Allocate driver data */
spidev = kzalloc(sizeof(*spidev), GFP_KERNEL);
if (!spidev)
return -ENOMEM;
/* Initialize the driver data */
spidev->spi = spi;
spin_lock_init(&spidev->spi_lock);
mutex_init(&spidev->buf_lock);
INIT_LIST_HEAD(&spidev->device_entry);
/* If we can allocate a minor number, hook up this device.
* Reusing minors is fine so long as udev or mdev is working.
*/
mutex_lock(&device_list_lock);
minor = find_first_zero_bit(minors, N_SPI_MINORS);
if (minor < N_SPI_MINORS) {
struct device *dev;
spidev->devt = MKDEV(SPIDEV_MAJOR, minor);
dev = device_create(spidev_class, &spi->dev, spidev->devt,
spidev, "spidev%d.%d",
spi->master->bus_num, spi->chip_select);
status = PTR_ERR_OR_ZERO(dev);
} else {
dev_dbg(&spi->dev, "no minor number available!\n");
status = -ENODEV;
}
if (status == 0) {
set_bit(minor, minors);
list_add(&spidev->device_entry, &device_list);
}
mutex_unlock(&device_list_lock);
spidev->speed_hz = spi->max_speed_hz;
if (status == 0)
spi_set_drvdata(spi, spidev);
else
kfree(spidev);
return status;
}
其中结构体struct spidev_data 定义如下:
struct spidev_data {
dev_t devt;
spinlock_t spi_lock;
struct spi_device *spi;
struct list_head device_entry;
/* TX/RX buffers are NULL unless this device is open (users > 0) */
struct mutex buf_lock;
unsigned users;
u8 *tx_buffer;
u8 *rx_buffer;
u32 speed_hz;
};
注意list_head变量,所有使用这个驱动的设备都会被做成一个链表。其中
dev = device_create(spidev_class, &spi->dev, spidev->devt,
spidev, “spidev%d.%d”,
spi->master->bus_num, spi->chip_select);
创建设备,并生成设备节点,设备节点在/dev目录下。
到此为止设备驱动也分析完了。
参考文章:
https://www.cnblogs.com/lknlfy/p/3265019.html