PSO粒子群算法调节PID控制器参数
概述
PSO(粒子群算法)在处理连续问题上有着较强的能力,因此很适合用来做参数优化,而PID控制器由三个参数组成,它们分别是:
K p 、 K i 、 K d K_p、K_i、K_d Kp、Ki、Kd
我们可以把PID控制器当做一个“黑箱”,输入为这三个参数,输出为响应曲线,我们要做的就是优化这个响应曲线。而一个控制效果好的PID控制器应针对不同类型输入都有较快的响应速度,较小的超调以及稳态误差。因此我们将经典的三种输入信号:阶跃、斜坡、抛物用来衡量PID控制效果。
适应函数设计
我们选用综合指标来衡量设计效果,由于是数字控制器,我们选用求和而不是积分的方式:
W = Σ e 2 ( i ) W=\Sigma e^2(i) W=Σe2(i)
又因为我们考虑了三种输入,因此:
Σ W = Σ Σ e 2 ( i ) \Sigma W=\Sigma \Sigma e^2(i) ΣW=ΣΣe2(i)
下面是编写的适应函数:
function return_value = PID_find_betterparameters(Kp,Ki,Kd)
t = 1:50;
ideal = 5;
x=[];e=[];
x(1)=0;
for i = t %阶跃输入
e(i) = ideal - x(i);
if(i>1)
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e) + Kd*(e(i)-e(i-1));
end
if i==1
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e);
end
end
for j = t
s(j) = (x(j)-ideal)^2;
end
return_value1 = sum(s);
for i = t %斜坡输入
e(i) = ideal*i - x(i);
if(i>1)
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e) + Kd*(e(i)-e(i-1));
end
if i==1
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e);
end
end
for j = t
s(j) = (x(j)-ideal*j)^2;
end
return_value2 = sum(s);
for i = t %抛物输入
e(i) = ideal*i^2 - x(i);
if(i>1)
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e) + Kd*(e(i)-e(i-1));
end
if i==1
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e);
end
end
for j = t
s(j) = (x(j)-ideal*j^2)^2;
end
return_value3 = sum(s);
return_value = (return_value1 + return_value2 + return_value3)/100;
end
PSO优化
之前也说到,我们将PID控制器当做一个“黑箱”来处理,它的返回值是 e e e ,输入维数为3,也就是一个三元函数。下面给出粒子群优化代码:
%---------------粒子群优化寻PID参数----------------%
close all;clear;clc;
maxgen = 100;
sizepop = 60;
Vmax = 0.5;
Vmin = -0.5;
popmax = 2;
popmin = -2;
c1 = 0.3;
c2 = 1.5;
%------------------初始化种群-----------------------%
for i = 1:sizepop
pop(i,:) = -2+4*rand(1,3);
V(i,:) = rand(1,3);
fitness(i) = PID_find_betterparameters(pop(i,1),pop(i,2),pop(i,3));
end
[bestfitness,bestindex] = min(fitness);
fitnesszbest = bestfitness;
fitnessgbest = fitness;
zbest = pop(bestindex,:); %种群历史最优解
gbest = pop; %个体历史最优解
%---------------寻优--------------------------%
for i = 1:maxgen
for j = 1:sizepop
%-----------速度更新-----------------%
V(j,:) = V(j,:) + c1*rand*(gbest(j,:) - pop(j,:)) + c2*rand*(zbest - pop(j,:));
V(j,find(V(j,:)>Vmax)) = Vmax; %限制搜索速度
V(j,find(V(j,:)<Vmin)) = Vmin;
%----------种群更新------------------%
pop(j,:) = pop(j,:) + V(j,:);
pop(j,find(pop(j,:)>popmax)) = popmax; %限制搜索范围
pop(j,find(pop(j,:)<popmin)) = popmin;
%----------更新适应值----------------%
fitness(j) = PID_find_betterparameters(pop(j,1),pop(j,2),pop(j,3));
end
%----------------个体最优更新-------------%
for j = 1:sizepop
if (fitness(j)<fitnessgbest(j))
gbest(j,:) = pop(j,:);
fitnessgbest(j,:) = fitness(j);
end
if (fitness(j)<fitnesszbest)
zbest = pop(j,:);
fitnesszbest = fitness(j);
end
end
yy(i) = fitnesszbest; %每一代的最优适应值
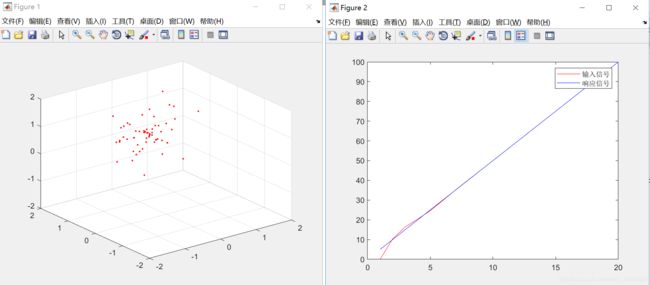
%---------------绘制搜索动态3D图---------------%
if (i>1)
delete(G);
end
G = scatter3(pop(:,1),pop(:,2),pop(:,3),40,'r.');
xlim([-2,2]);
ylim([-2,2]);
zlim([-2,2]);
drawnow
hold on
pause(0.05);
end
输出最优参数和对应适值:
zbest %最优参数
fitnesszbest %最优参数对应的适值
绘制响应动态图(以斜坡为例):
%------------------绘制响应-----------------------------%
t = 1:100;
ideal = 5;
x=[];e=[];
x(1)=0;
Kp = zbest(1); Ki = zbest(2); Kd = zbest(3);
for i = t
e(i) = ideal*i - x(i);
if(i>1)
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e) + Kd*(e(i)-e(i-1));
end
if i==1
x(i+1) = x(i) + Kp*e(i) + Ki*sum(e);
end
end
figure(2);
plot(1:101,x,'r');
xlim([0,20]);
hold on;
plot(1:101,5*[1:101],'b');
xlim([0,20]);

总结
我们利用PSO处理连续问题的优势对工程上常用的PID控制进行优化,虽然现在大部分的PID参数调节都是依靠经验,但是在不久的将来,智能算法的进步一定会促使控制算法参数调节更为便捷。