HOG+SVM的物体检测
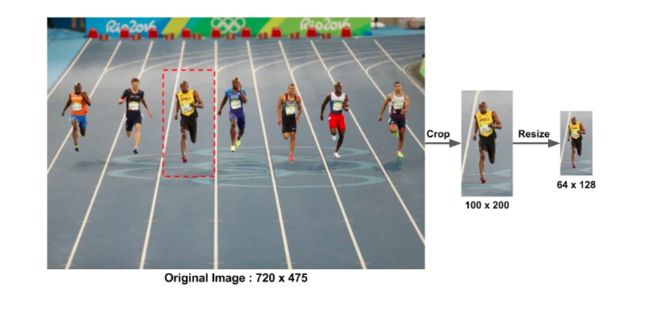
想做物体检测,可以试试HOG!例如我们在下面的图片中检测这位美女。

HOG全名 Histogram of Oriented Gradients,也就是方向梯度的直方图,它主要利用梯度的直方图构建特征向量。
最经典的是用作行人检测,也可以用作其他物体检测。
方向梯度(oriented Gradients)
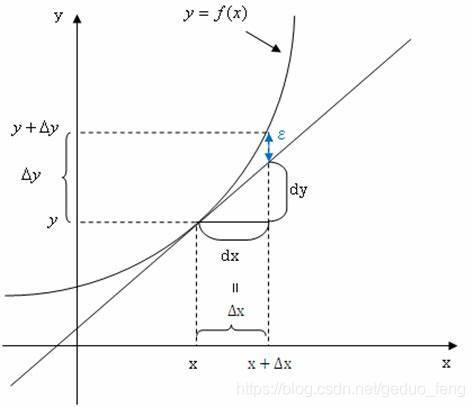
一维梯度可以认为是一阶导数: d y d x = y ‘ \frac{\mathrm{d} y }{\mathrm{d} x} = y^{`} dxdy=y‘
z = f ( x , y ) z=f(x,y) z=f(x,y)的二维梯度
g r a d f = f x ( x , y ) ∗ i + f y ( x , y ) ∗ j grad f = f_x(x,y) *i + f_y(x,y)*j gradf=fx(x,y)∗i+fy(x,y)∗j
f x ( x , y ) f_x(x,y) fx(x,y)表示y保持不变时,f(x,y)关于x的偏导数。
f y ( x , y ) f_y(x,y) fy(x,y)表示保持x不变时,f(x,y)关于y的偏导数。

由公式可知,二维梯度是有方向的。可以将其转换了梯度的幅值 g g g和幅度 θ \theta θ。
g = f x 2 + f y 2 θ = arctan f x f y g = \sqrt{f_x^{2} + f_y^{2}} \\ \theta = \arctan{\frac{f_x}{f_y}} g=fx2+fy2θ=arctanfyfx
数字图像中的微分通过减法来代替。这里使用的水平微分核为 [ − 1 , 0 , 1 ] [-1, 0, 1] [−1,0,1], 垂直微分核为 [ − 1 , 0 , 1 ] T [-1, 0,1]^T [−1,0,1]T。可以使用其他的微分核代替,例如sober算子。
 HOG算法中最重要的一步就是,计算梯度的幅值和幅度,然后根据幅度统计直方图。具体怎么做的见算法流程。
HOG算法中最重要的一步就是,计算梯度的幅值和幅度,然后根据幅度统计直方图。具体怎么做的见算法流程。
算法流程

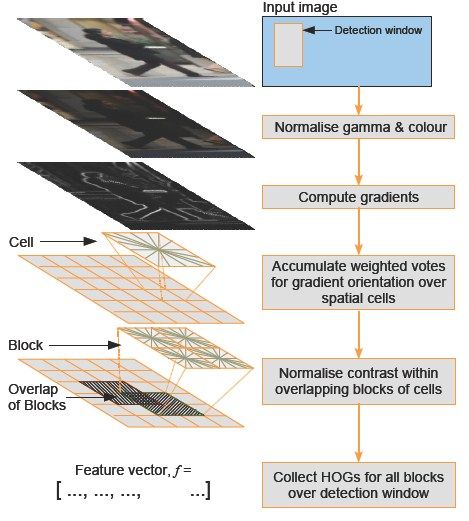
检测窗口(detection window)
可以认为是从一张大图找提取出一部分作为检测图像。
归一化图像(normalize gamma & colour)
HOG是通过梯度信息去构建特征,所有并不需要颜色信息,可以转换为灰度图。
为了减少光照的影响,提高对比度,对图像进行伽玛矫正。但是有的人说可以直接跳过这一步,因为后面会对更小的块区域进行归一化,而且局部归一化的效果会更好
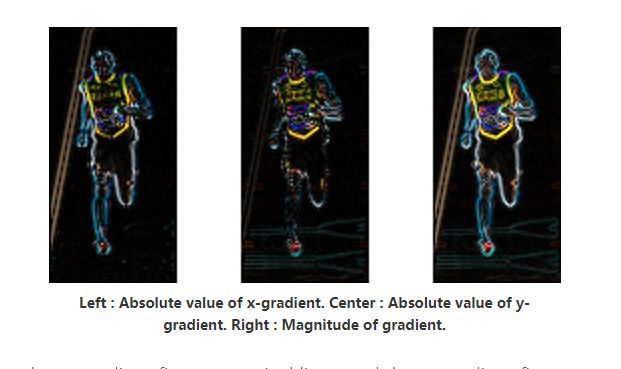
计算梯度(compute gradient)
计算方法见方向梯度部分,效果如下
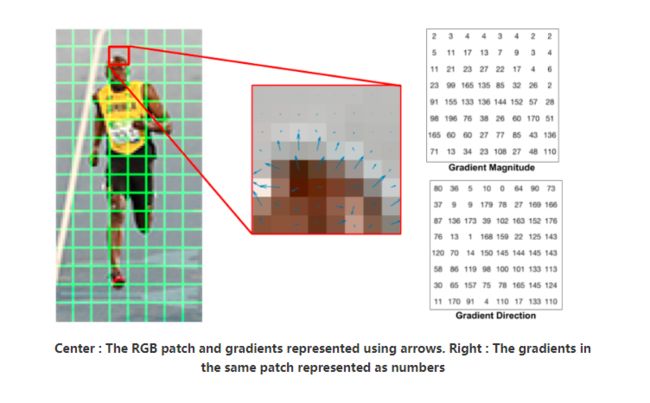 计算每个像素的梯度,彩色图取幅值最大的一个通道。这里将图分成了8*8的cell,一张64*128的图像,被分割成 8 * 16 个cell。
计算每个像素的梯度,彩色图取幅值最大的一个通道。这里将图分成了8*8的cell,一张64*128的图像,被分割成 8 * 16 个cell。
计算方向梯度直方图
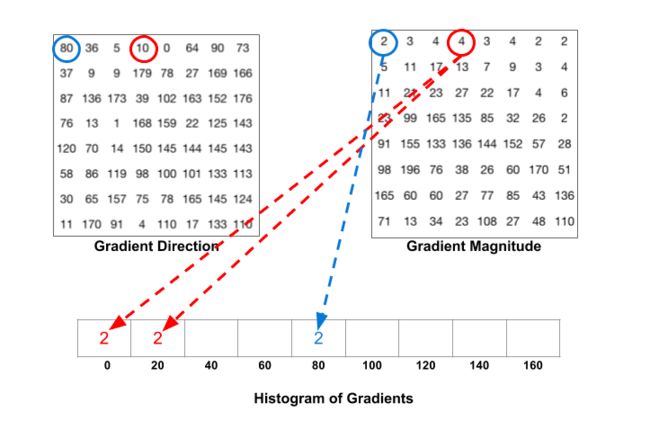
以梯度幅度作为直方图的统计值, 梯度幅值作为统计量。这里并不是之间将幅值分到一个bin,而是根据幅度将其按比例分到最近的两个bin。这样可以避免梯度信息的跳变。所以称为 accumulate weighted vote for gradient orientation over spatial cells。形成9*1的向量。
对块内的cell进行归一化
为了适应亮度变化,以及前景与背景对比度的变换,以块为单位进行归一化。块的大小为2*2.,归一化的方式可以选择NORM_L1,NORM_L2,NORM_MINMAX,NORM_INF等。
关于block 的大小以及cell 的大小,相关论文中给出了如下测试结果,在 Block size=3*3, cell size=6*6 时错误率最小,但是这里并没有采用。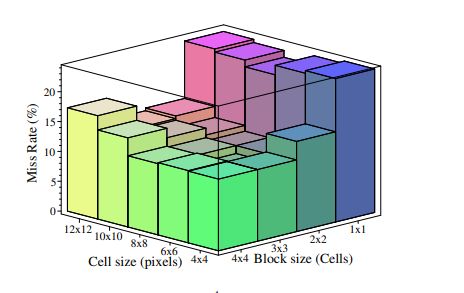
生成特征向量
将所有Block向量组合在一起,形成feature vector.
检测图像大小为(image size):64 * 128;
块大小(Block size):2 * 2;
单元大小(cell size):8 * 8;
每个Block 归一化后形成的36*1的向量。(2 * 2 * 9 = 36)
Block 的数目为水平7个( 64 / 8 − 1 64/8-1 64/8−1),垂直15个( 16 − 1 16-1 16−1)。
最后形成特性大小为: 7 ∗ 8 ∗ 36 = 3780 7 * 8 * 36=3780 7∗8∗36=3780
在opencv中使用 HOG
官方HOG文档
实现英文介绍
不想看英文接口介绍的可以看接口中文翻译
首先来个比较简单的,直接利用官方训练好的 SVM 分类器做行人检测,感受一下效果。
将要使用一下接口:
/** @brief Returns coefficients of the classifier trained for people detection (for 64x128 windows).
*/
std::vector<float> getDefaultPeopleDetector() //获取训练好的行人检测系数
/**@brief Sets coefficients for the linear SVM classifier.
@param svmdetector coefficients for the linear SVM classifier.
*/
virtual void setSVMDetector(InputArray svmdetector); // 设置SVM分类器的系数
/** @brief Detects objects of different sizes in the input image. The detected objects are returned as a list
of rectangles.
*/
// 多尺度检测物体
virtual void detectMultiScale(InputArray img, CV_OUT std::vector<Rect>& foundLocations,
double hitThreshold = 0, Size winStride = Size(),
Size padding = Size(), double scale = 1.05,
double finalThreshold = 2.0, bool useMeanshiftGrouping = false) const;
行人检测程序(使用官方训练好的分类系数)
#include 
HOG物体检测
如果我们想做其他物体检测,那么就需要自己训练分类器。其实有了HOG提取的特征向量,训练SVM是非常容易的事情,大致可以分为三步。
- 准备训练数据和标签
- 利用训练数据训练分类器
- 使用测试数据对分类器做测试
例如使用INRIA 行人数据集 (INRIA Person Dataset)进行训练和测试。其他训练和测试代码如下:
#include 本代码参考于网络。
参考资料
Histogram of Oriented Gradients
Histograms of Oriented Gradients for Human Detection论文
Histograms of Oriented Gradients for Human Detection论文翻译
HOG:从理论到OpenCV实践
INRIA 行人数据集 (INRIA Person Dataset)
物体检测参考实现