高斯白噪声下基于EM的多径时延估计
本文主要来源于复现文献的部分内容,有一定的参考价值:
[1] 刘波. 基于EM的突发通信参数估计技术研究[D]. 2009.
文末有代码和参考文献网盘下载地址,有问题欢迎留言交流!
1 引言
对于多径传播,接收信号是由源信号与它的各次回波叠加而成的。对接收到的信号进行时间延迟估计广泛应用于雷达、声纳、电声测量、石油地震勘探和生物医学等领域,具有重要的实际应用意义。
对于雷达、声纳以及无线通信等应用而言,均需要对各径信号的时延进行估计,然后进行RAKE合并等处理,以避免由于多径效应带来的系统性能恶化。本文考虑发送信号已知情况下的多径时延估计问题,此类多径时延估计问题是主动式雷达与声纳系统中常见的;另外,无线通信领域中用于对信道进行估计和均衡的导频信号,非合作源定位所用的照射信号中具有某些已知时域特征的部分等也属此类问题。
经典的时间延迟估计技术采用的是匹配滤波器的方法,它利用接收信号与发射信号求相关后发生多峰的位置对时间延迟做出估计,但是这种方法的多径分辨能力依赖于发射信号相关函数的主峰宽度(近似与信号带宽成反比)。当信号带宽较窄时,基于相关运算的方法会由于各个峰值的相互重叠而带来较大的估计误差。故目前多径环境下时间延迟估计问题的重点是研究相关不可解情况下的高分辨率多径时间延迟估计算法。
最大似然估计是参数估计问题的有效方法,具有近似最佳的估计性能及稳健性。但是,鉴于多信号多参数估计问题所需多维优化的复杂性,因此在多径时延估计问题中直接使用最大似然估计方法并不可行。EM算法可以将多维优化的复杂问题分解为一系列一维优化问题的迭代,在减小运算复杂性的同时可以保证估计性能。
2 问题背景及信号模型
多径时延估计是现代通信信号处理中信号检测与参数估计问题的一个重要组成部分。发送端的发送信号由于受到传播空间中不同物体的反射和漫射,使得接收机收到的信号是多条路径上信号的合成,即接收信号 r ( t ) r(t) r(t)可以简单表示为如下形式[1]:
r ( t ) = ∑ l = 1 L h l s ( t − τ l ) + w ( t ) t ∈ [ 0 , T ) r(t) = \sum\limits_{l = 1}^L {{h_l}s(t - {\tau _l}) + w(t)} \quad t \in [0,T) r(t)=l=1∑Lhls(t−τl)+w(t)t∈[0,T) (1)
式中, s ( t ) s(t) s(t)为t时刻的发送信号; w ( t ) w(t) w(t)为t时刻的观测噪声,其符合高斯分布,平均功率为 σ 2 {{\sigma }^{2}} σ2;参数 τ l {{\tau }_{l}} τl和 h l {{h}_{l}} hl分别为各条多径信号的时延和复信道系数,包含有信号由发送至接收所经历的时间延迟、幅度衰减、以及相位变化等信息,反映了信号的传播距离、传播介质以及反射体的特性等; L L L为存在的总的多径个数, [ 0 , T ) [0,T) [0,T)为信号的观测区间。
3 基于EM的多径时延估计
由第2章可知,接收信号可以表示为(1)式,总的信号路径个数为L,因此带估计参数向量可以表示如下
θ = ( τ 1 , τ 2 , ⋯ , τ L , h 1 , h 2 , ⋯ , h L ) T \theta ={{({{\tau }_{1}},{{\tau }_{2}},\cdots ,{{\tau }_{L}},{{h}_{1}},{{h}_{2}},\cdots ,{{h}_{L}})}^{T}} θ=(τ1,τ2,⋯,τL,h1,h2,⋯,hL)T (2)
本文考虑确定性信号下的[\theta ]估计问题。为不失一般性,假设
∫ T s 2 ( t ) d t = 1 \int_{T}{{{s}^{2}}(t)dt=1} ∫Ts2(t)dt=1 (3)
则由(2)可得[r(t)]的对数似然函数为
ln f R ( r ; θ ) = C − 1 2 σ 2 ∫ [ r ( t ) − ∑ l = 1 L h l s ( t − τ l ) ] 2 d t \ln {{f}_{R}}(r;\theta )=C-\frac{1}{2{{\sigma }^{2}}}{{\int{\left[ r(t)-\sum\limits_{l=1}^{L}{{{h}_{l}}s(t-{{\tau }_{l}})} \right]}}^{2}}dt lnfR(r;θ)=C−2σ21∫[r(t)−l=1∑Lhls(t−τl)]2dt (4)
其中,C为常数。为获得 h l {{h}_{l}} hl和 τ l {{\tau }_{l}} τl的最大似然估计量,必须解决式(5)的最优化问题。
min θ ∫ [ r ( t ) − ∑ l = 1 L h l s ( t − τ l ) ] 2 \underset{\theta }{\mathop{\min }}\,{{\int{\left[ r(t)-\sum\limits_{l=1}^{L}{{{h}_{l}}s(t-{{\tau }_{l}})} \right]}}^{2}} θmin∫[r(t)−l=1∑Lhls(t−τl)]2 (5)
这是一个2N元的复杂优化问题。当然,使用暴力也可以解决问题,在粗略的网格上通过搜索目标函数求值,粗略定位全局最小值,然后应用高斯法、牛顿-拉夫森法或其他迭代梯度搜索算法进行求解。然而,这些方法往往是非常复杂的,且需要大量的计算时间。
根据文献[1],对 进行分解,以参与叠加的各个单径信号分量为基础构造完备数据如下所示
x ( t ) = ( x 1 ( t ) , x 2 ( t ) , ⋯ , x L ( t ) ) T x(t)={{\left( {{x}_{1}}(t),{{x}_{2}}(t),\cdots ,{{x}_{L}}(t) \right)}^{T}} x(t)=(x1(t),x2(t),⋯,xL(t))T (6)
其中
x l ( t ) = h l s ( t − τ l ) + w l ( t ) {{x}_{l}}(t)={{h}_{l}}s(t-{{\tau }_{l}})+{{w}_{l}}(t) xl(t)=hls(t−τl)+wl(t)
∑ l = 1 L w l ( t ) = w ( t ) \sum\limits_{l=1}^{L}{{{w}_{l}}(t)}=w(t) l=1∑Lwl(t)=w(t)
r ( t ) = 1 T x ( t ) 1 T = ( 1 , 1 , ⋯ , 1 ) r(t)={{\mathbf{1}}^{T}}x(t)\begin{matrix} {} & {} \\ \end{matrix}{{\mathbf{1}}^{T}}=(1,1,\cdots ,1) r(t)=1Tx(t)1T=(1,1,⋯,1)
则有
r ( t ) = ∑ l = 1 L x l ( t ) r(t)=\sum\limits_{l=1}^{L}{{{x}_{l}}(t)} r(t)=l=1∑Lxl(t) (7)
我们希望通过使 ln f R ( r ; θ ) \ln {{f}_{R}}(r;\theta ) lnfR(r;θ)最大来求解的最大似然估计量(MLE),但这是困难的,以求 ln f X ( x ; θ ) \ln {{f}_{X}}(x;\theta ) lnfX(x;θ)的最大值来代替,因x无法求得,故使用对数似然函数的条件数学期望来代替对数似然函数[2],即
E { ln f X ( x ; θ ) ∣ r ; θ } = ∫ ln f X ( x ; θ ) f ( x ∣ r ; θ ) d x E\left\{ \ln {{f}_{X}}(x;\theta )|r;\theta \right\}=\int{\ln }{{f}_{X}}(x;\theta )f(x|r;\theta )dx E{lnfX(x;θ)∣r;θ}=∫lnfX(x;θ)f(x∣r;θ)dx (8)
上式中,必须知道 θ \theta θ才能确定 ln f X ( x ; θ ) \ln {{f}_{X}}(x;\theta ) lnfX(x;θ),故对数似然函数的期望将作为当前的猜测,令 θ i {{\theta }^{i}} θi表示 θ \theta θ的MLE的第 i i i次猜测,则根据
ln f X ( x ; θ ) = ∑ l = 1 L ln f X l ( x l ; θ ) = C 1 − ∑ l = 1 L 1 2 σ l 2 ∫ [ x l ( t ) − h l s ( t − τ l ) ] 2 d t \ln {{f}_{X}}(x;\theta )=\sum\limits_{l=1}^{L}{\ln {{f}_{{{X}_{l}}}}({{x}_{l}};\theta )}={{C}_{1}}-\sum\limits_{l=1}^{L}{\frac{1}{2\sigma _{l}^{2}}}{{\int{\left[ {{x}_{l}}(t)-{{h}_{l}}s(t-{{\tau }_{l}}) \right]}}^{2}}dt lnfX(x;θ)=l=1∑LlnfXl(xl;θ)=C1−l=1∑L2σl21∫[xl(t)−hls(t−τl)]2dt (9)
式中,C1为与待估参数无关的常数。确定完备数据的平均对数似然函数为
Q ( θ , θ i ) = E { ln f X ( x ; θ ) ∣ r ; θ } = C 2 − ∑ l = 1 L 1 2 σ l 2 ∫ [ x l i ( t ) − h l s ( t − τ l ) ] 2 d t Q(\theta ,{{\theta }^{i}})=E\left\{ \ln {{f}_{X}}(x;\theta )|r;\theta \right\}={{C}_{2}}-\sum\limits_{l=1}^{L}{\frac{1}{2\sigma _{l}^{2}}}{{\int{\left[ x_{l}^{i}(t)-{{h}_{l}}s(t-{{\tau }_{l}}) \right]}}^{2}}dt Q(θ,θi)=E{lnfX(x;θ)∣r;θ}=C2−l=1∑L2σl21∫[xli(t)−hls(t−τl)]2dt (10)
式中,C2为与待估参数无关的常数。其中, x l i ( t ) x_{l}^{i}(t) xli(t)由观测数据 r ( t ) r(t) r(t)以及第 i i i次迭代中获得的待估参数 θ i {{\theta }^{i}} θi给出,利用联合高斯随机变量的条件期望的标准结果,可以得到如下表示
x l i ( t ) = E { x l ( t ) / ∑ l = 1 L x l ( t ) = r ( t ) ; θ i } = E ( x l ) + C x r C r r − 1 ( r − E ( r ) ) x_{l}^{i}(t)=E\left\{ {{{x}_{l}}(t)}/{\sum\limits_{l=1}^{L}{{{x}_{l}}(t)=r(t);}}\;{{\theta }^{i}} \right\}=E\left( {{x}_{l}} \right)+{{C}_{xr}}C_{rr}^{-1}(r-E(r)) xli(t)=E{xl(t)/l=1∑Lxl(t)=r(t);θi}=E(xl)+CxrCrr−1(r−E(r)) (11)
由此可以看出,EM算法的M步骤中,对条件期望函数 Q ( θ , θ i ) Q(\theta ,{{\theta }^{i}}) Q(θ,θi)的最大化问题可以通过对求和项中的各分量分别最大化来实现,即
θ ^ i + 1 = arg max θ Q ( θ , θ ^ i ) {{\hat{\theta }}^{i+1}}=\arg \underset{\theta }{\mathop{\max }}\,Q(\theta ,{{\hat{\theta }}^{i}}) θ^i+1=argθmaxQ(θ,θ^i) (12)
则EM算法步骤可以描述为:
E-step:根据所获得的条件期望函数 Q ( θ , θ i ) Q(\theta ,{{\theta }^{i}}) Q(θ,θi)的表达式,利用第 i i i次迭代得到的参数估计 θ ^ i {{\hat{\theta }}^{i}} θ^i。对 l=1,2,…,L,构造数据
x l i ( t ) = h l i s ( t − τ l i ) + β l [ r ( t ) − ∑ l = 1 L h l i s ( t − τ l i ) ] x_{l}^{i}(t)=h_{l}^{i}s(t-\tau _{l}^{i})+{{\beta }_{l}}\left[ r(t)-\sum\limits_{l=1}^{L}{h_{l}^{i}s(t-\tau _{l}^{i})} \right] xli(t)=hlis(t−τli)+βl[r(t)−l=1∑Lhlis(t−τli)] (13)
M-step:根据上一步得到的数据,对l=1,2,…,L,计算使(14)式最优化的参数 h l i + 1 , τ l i + 1 h_{l}^{i+1},\tau _{l}^{i+1} hli+1,τli+1
min h l , τ l ∫ [ x l i ( t ) − h l s ( t − τ l ) ] 2 d t \underset{{{h}_{l}},{{\tau }_{l}}}{\mathop{\min }}\,{{\int{\left[ x_{l}^{i}(t)-{{h}_{l}}s(t-{{\tau }_{l}}) \right]}}^{2}}dt hl,τlmin∫[xli(t)−hls(t−τl)]2dt (14)
其中,
∑ l = 1 L β l = 1 \sum\limits_{l=1}^{L}{{{\beta }_{l}}=1} l=1∑Lβl=1
经过化简计算,得对应于同一信号的参数估计 ( h ^ l , τ ^ l ) ({{\hat{h}}_{l}},{{\hat{\tau }}_{l}}) (h^l,τ^l)为
τ ^ l = arg max τ l ∫ x l i ( t ) s ( t − τ l ) d t {{\hat{\tau }}_{l}}=\arg \underset{{{\tau }_{l}}}{\mathop{\max }}\,\int{x_{l}^{i}(t)s(t-{{\tau }_{l}})}dt τ^l=argτlmax∫xli(t)s(t−τl)dt (15)
h ^ l = ∫ x l i ( t ) s ( t − τ l i + 1 ) d t ∫ s 2 ( t − τ l i + 1 ) d t {{\hat{h}}_{l}}=\frac{\int{x_{l}^{i}(t)s(t-\tau _{l}^{i+1})}dt}{\int{{{s}^{2}}(t-\tau _{l}^{i+1})dt}} h^l=∫s2(t−τli+1)dt∫xli(t)s(t−τli+1)dt (16)
重复以上两个步骤直到算法收敛。
4 实验结果及分析
4.1 仿真参数设置
为了验证上述所提出的对多径时延EM估计方法的有效性,进行蒙特卡罗仿真实验,实验次数N=1000。仿真中,采用加窗的线性调频信号 s ( t ) s(t) s(t)作为已知的导频信号,如下所示
s ( t ) = g ( t ) e j 2 π ( t − T 2 ) 2 , 0 < t ≤ T s(t)=g(t){{e}^{j2\pi {{\left( t-\frac{T}{2} \right)}^{2}}}},\ 0
其中, g ( t ) g(t) g(t)为钟形的窗函数,如下所示:
g ( t ) = { 0.5 − 0.5 cos ( π t / T w ) 0 < t < T w 1 T w ⩽ t ⩽ T − T w , T w = T 10 0.5 − 0.5 cos [ π ( t − T ) / T w ] T − T w < t ⩽ T g(t)=\left\{\begin{array}{ll}0.5-0.5 \cos \left(\pi t / T_{w}\right) & 0
信号的调频斜率K=100000,持续时间T=20.6ms,采样速率 f s {{f}_{s}} fs=10080,采样周期 T s = 1 / f s {{T}_{s}}=1/{{f}_{s}} Ts=1/fs,信号带宽 B = 2 K T = 4.12 k H z B=2KT=4.12kHz B=2KT=4.12kHz。设接收信号 r ( t ) r(t) r(t)由2路多径信号构成,其参数分别为
τ l = 16 T s , h 1 = e j π / 4 ; τ 2 = 20 T s , h 1 = e j π / 8 {{\tau }_{l}}=16{{T}_{s}},{{h}_{1}}={{e}^{j\pi /4}};{{\tau }_{2}}=20{{T}_{s}},{{h}_{1}}={{e}^{j\pi /8}} τl=16Ts,h1=ejπ/4;τ2=20Ts,h1=ejπ/8 (19)
在EM算法的迭代过程中,设置迭代收敛的判定条件为对数似然函数的增量小于其取值的0.1%,满足此条件时的参数取值即为最终估计值,即定义如下的收敛判定条件:
Λ ( r ; θ i + 1 ) − Λ ( r ; θ i ) ≤ Λ ( r ; θ i ) × 0.1 \Lambda \left( \mathbf{r};{{\theta }^{i+1}} \right)-\Lambda \left( \mathbf{r};{{\theta }^{i}} \right)\le \Lambda \left( \mathbf{r};{{\theta }^{i}} \right)\times 0.1% Λ(r;θi+1)−Λ(r;θi)≤Λ(r;θi)×0.1 (20)
4.2 仿真结果及分析
钟形函数 g ( t ) g(t) g(t)的时域波形如图1所示,线性调频信号 s ( t ) s(t) s(t)的实部、虚部的时域波形如图2,线性调频信号的时频图如图3所示。

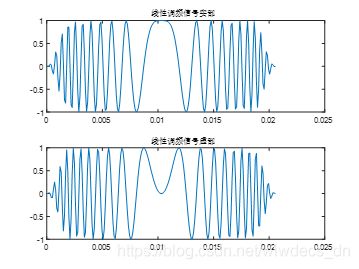

图4~图6为对时延参数和传播系数参数估计的均方根误差性能随信噪比变化的关系曲线。
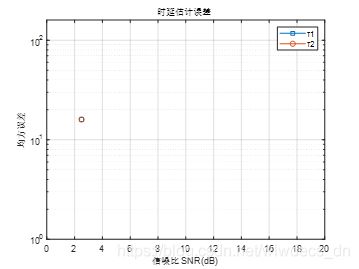
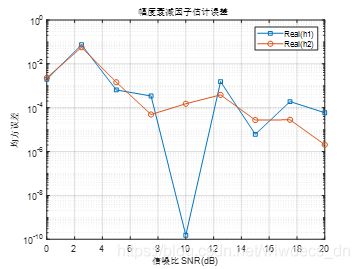
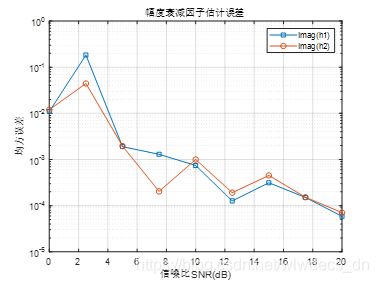
从图中所示的仿真结果可以看出,在信噪比较低的情况下,会存在多径时延估计不准的偶然情况,除信噪比SNR=2.5dB时,时延估计存在误差外,其他信噪比下误差均为0。此外,在信噪比SNR≥5.5dB时,幅度衰减因子的实部、虚部均方根误差可达到10-3左右。仿真结果表明,高斯白噪声下基于EM的多径时延估计算法能够较好地估计多径时延和幅度衰减因子。
5 总结与展望
当多径信号时延不是采样周期 的整数倍时,要提高时延估计的精度需要通过内插处理才能得到。在EM算法的每次迭代中都使用内插将会大大增加算法的运算量,因此可以首先对接收数据进行预处理,通过DFT将其变换到频率域,再进行EM算法迭代处理,即可避免了原先在迭代过程中频繁的内插处理。迭代初始值的设置既影响EM算法的收敛结果,同时也影响算法的收敛速度。初值的选择和迭代更新可参考轮换投影(AP)方法。
6 参考文献
[1] 刘波. 基于EM的突发通信参数估计技术研究[D]. 2009.
[2] Steven M. Kay. 统计信号处理基础——检测与估计理论(卷I、卷II合集)[M], 2014. 154-156.
[3] Meir Feder, Ehud Weinstein. Multipath Time-Delay Estimation via the EM Algorithm[D]. Woods Hole Oceanographic Institution, 1987.
7 代码
下载:https://download.csdn.net/download/wlwdecs_dn/12620599
8 获取更多内容请关注:
