slam14讲 —— slam的环境搭建
一.
- 物理机的环境:win10
- 虚拟机的版本:VM 14
- 选择的Linux版本:Ubuntu 16.04、Ubuntu 18.04
注:虚拟机及Ubuntu的安装参照百度,博客,软件安装管家等。
二.
1 . Vmware tools安装:点击虚拟机,选择安装VMware tools
之后具体可百度:

2 . cmake的安装:
打开终端:
sudo apt-get install cmake cmake-gui
安装好之后可查看版本:
cmake --version
需要安装其他版本请百度。
3 . PCL的安装:因为PCL的库比较复杂,所以先安装PCL,安装之前请拍摄快照备份。
1)安装依赖库:
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.8 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre
sudo apt-get install libopenni-dev
sudo apt-get install libopenni2-dev
sudo updatedb
注1:如果有的库找不到:在输入一部分后按Tab键 会自动搜索可用的库
如:sudo apt-get install openjdk再按下Tab键。
注2:我没有安装以下
sudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre
也成功了。使用暂时没问题,可能是我没用到QT,不知道。
2)安装X11,OpenGL。
sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev
sudo apt-get install build-essvtk-7.1.1ential libgl1-mesa-dev libglu1-mesa-dev
3)下载VTK,源码编译VTK。
下载地址:vtk.org
选择相应的版本:此处我选择的时VTK-7.1.1.zip
下载好了,解压进入VTK-7.1.1目录,打开终端:
sudo cmake-gui
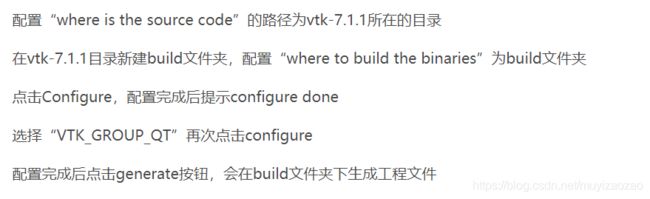
关掉cmake-gui,进入VTK-7.1.1目录的build,打开终端:
make
sudo make install
4)下载PCL源码:
下载网址:https://github.com/PointCloudLibrary/pcl
选择版本即可:此处我选的时1.9.0.zip
解压后,进入pcl-pcl-1.9.0文件夹,新建build文件。
进入build,打开终端:
cmake -DCMAKE_BUILD_TYPE=None ..
make
sudo make install
注:编译时间较长,可根据电脑选择
make -j4
注2:make时出现的问题:
virtual memory exhausted无法分配内存
解决办法:
出现这种问题的原因:
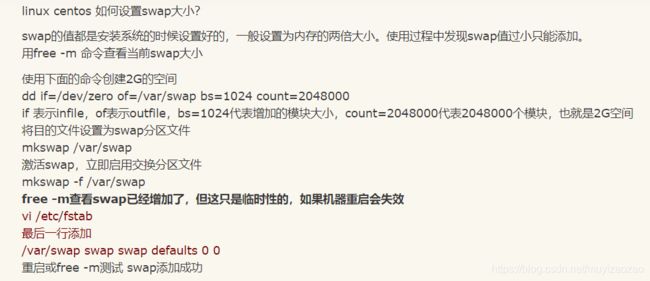
退出当前的make:
make clean
在桌面打开终端,按下面操作:

完成后,再次进入pcl-pcl-1.9.0的build下:
make -j4
sudo make install
即可完成。
可进行测试:
参照博客:https://blog.csdn.net/lilywri823/article/details/86583269?depth_1-utm_source=distribute.pc_relevant.none-task&utm_source=distribute.pc_relevant.none-task
- Opencv和Opencv_contrib的安装:
可参照我之前的博客:
https://blog.csdn.net/muyizaozao/article/details/104930435
5. Kdevelop的安装:
在桌面上打开终端:
sudo apt-get install kdevelop
或可参照百度的博客:
- Eigen、Sophus、Ceres、g2o的安装:
1)在安装PCL的时候就把eigen库安装好了,不需要再安装。
2)下载的slam十四讲源码里就有sophus、ceres、g2o等。
下载地址:
github.com/gaoxiang12/slambook
里面的3rdparty就有,将其复制到各自新建的文件夹,并解压。
1)sophus依赖项:
sophus是在Eigen的基础上开发的,不需要依赖项。直接进入解压的Sophus文件夹后新建build,进入build,编译安装。
cmake ..
make
sudo make install
2)Ceres依赖项:
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev libgoole-glog-dev libgtest-dev
注:如果有的库版本不对,输入该库前程如libcxsparse再按下Tab键可搜索可用的库。
之后也是一样进入文件夹后,新建build,进入。
cmake ..
make
sudo make install
3)g2o的依赖项:
sudo apt-get install libqt4-dev qt4-qmake libqglviewer-dev libsuitesparse-dev libcxsparse3.1.2 libcholmod-dev
进行新建build,进入build。
cmake ..
make
sudo make install
即可。
至此,14讲前七章的内容的环境搭建成功。