蜂鸣器的资料网上也有很多……这里就简单记录一下……有有源蜂鸣器和无源蜂鸣器两种 这里我用的是无源蜂鸣器的模块 ,自带了放大电路,否则要自己焊一个……
这里我设想的是用不同频率的pwm波驱动蜂鸣器发出不同频率的乐音,对于钢琴上的 CDEFGAB。
一共搞了两个程序,第一个没有实现功能 ,第二个实现了。
(一)只能输出固定频率可调占空比的pwm波形
nrf_pwm.c
#include "nrf_gpiote.h"
#include "nrf_gpio.h"
#if(USE_WITH_SOFTDEVICE == 1)
#include "nrf_sdm.h"
#endif
static uint32_t pwm_max_value,pwm_next_value[PWM_MAX_CHANNELS], pwm_next_max_value, pwm_io_ch[PWM_MAX_CHANNELS], pwm_running[PWM_MAX_CHANNELS];
static bool pwm_modified[PWM_MAX_CHANNELS];
static uint8_t pwm_gpiote_channel[PWM_MAX_CHANNELS];
static uint32_t pwm_num_channels;
static uint32_t pwm_cc_update_margin_ticks = 10;
static const uint8_t pwm_cc_margin_by_prescaler[] = {80, 40, 20, 10, 5, 2, 1, 1, 1, 1};
#define PWM_TIMER_CURRENT PWM_TIMER->CC[3]
#define PWM_TIMER2_CURRENT PWM_TIMER2->CC[3]
void PWM_IRQHandler(void);
static void apply_pan73_workaround(NRF_TIMER_Type *timer, bool enable)
{
if(timer == NRF_TIMER0)
{
*(uint32_t *)0x40008C0C = (enable ? 1 : 0);
}
else if(timer == NRF_TIMER1)
{
*(uint32_t *)0x40009C0C = (enable ? 1 : 0);
}
else if(timer == NRF_TIMER2)
{
*(uint32_t *)0x4000AC0C = (enable ? 1 : 0);
}
}
static __INLINE bool safe_margins_present(uint32_t timer_state, uint32_t compare_state) // Approx runtime ~2us
{
if(compare_state <= pwm_cc_update_margin_ticks)
{
if(timer_state >= compare_state && timer_state < (pwm_max_value + compare_state - pwm_cc_update_margin_ticks))
return true;
else return false;
}
else
{
if(timer_state < (compare_state - pwm_cc_update_margin_ticks) || timer_state >= compare_state)
return true;
else return false;
}
}
static void ppi_enable_channel(uint32_t ch_num, volatile uint32_t *event_ptr, volatile uint32_t *task_ptr)
{
if(ch_num >= 16) return;
else
{
#if(USE_WITH_SOFTDEVICE == 1)
sd_ppi_channel_assign(ch_num, event_ptr, task_ptr);
sd_ppi_channel_enable_set(1 << ch_num);
#else
// Otherwise we configure the channel and return the channel number
NRF_PPI->CH[ch_num].EEP = (uint32_t)event_ptr;
NRF_PPI->CH[ch_num].TEP = (uint32_t)task_ptr;
NRF_PPI->CHENSET = (1 << ch_num);
#endif
}
}
#if(USE_WITH_SOFTDEVICE == 1)
nrf_radio_signal_callback_return_param_t *nrf_radio_signal_callback(uint8_t signal_type)
{
static nrf_radio_signal_callback_return_param_t return_params;
return_params.callback_action = NRF_RADIO_SIGNAL_CALLBACK_ACTION_END;
switch(signal_type)
{
case NRF_RADIO_CALLBACK_SIGNAL_TYPE_START: /**< This signal indicates the start of the radio timeslot. */
PWM_IRQHandler();
break;
case NRF_RADIO_CALLBACK_SIGNAL_TYPE_TIMER0: /**< This signal indicates the NRF_TIMER0 interrupt. */
break;
case NRF_RADIO_CALLBACK_SIGNAL_TYPE_RADIO: /**< This signal indicates the NRF_RADIO interrupt. */
break;
case NRF_RADIO_CALLBACK_SIGNAL_TYPE_EXTEND_FAILED: /**< This signal indicates extend action failed. */
break;
case NRF_RADIO_CALLBACK_SIGNAL_TYPE_EXTEND_SUCCEEDED: /**< This signal indicates extend action succeeded. */
break;
}
return &return_params;
}
#endif
uint32_t nrf_pwm_init(nrf_pwm_config_t *config)
{
if(config->num_channels == 0 || config->num_channels > PWM_MAX_CHANNELS) return 0xFFFFFFFF;
switch(config->mode)
{
case PWM_MODE_C: // 8-bit resolution, 520Hz PWM frequency, 1us 1923
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1923;
nrf_pwm_set_value(0, 960);
break;
case PWM_MODE_D: // 8-bit resolution, 585Hz PWM frequency, 1us 1709
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1709;
nrf_pwm_set_value(0, 850);
break;
case PWM_MODE_E: // 0-1000 resolution, 650Hz PWM frequency, 1us 1538
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1538;
nrf_pwm_set_value(0, 765);
break;
case PWM_MODE_F: // 0-100 resolution, 693Hz PWM frequency, 1us
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1443;
nrf_pwm_set_value(0, 720);
break;
case PWM_MODE_G: // 8-bit resolution, 780Hz PWM frequency, 1us
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1282;
nrf_pwm_set_value(0, 640);
break;
case PWM_MODE_A: // 8-bit resolution, 867Hz PWM frequency, 1us
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1153;
nrf_pwm_set_value(0, 575);
break;
case PWM_MODE_B: // 8-bit resolution, 975Hz PWM frequency, 1us
PWM_TIMER->PRESCALER = 4;
pwm_max_value = 1026;
nrf_pwm_set_value(0, 510);
break;
default:
return 0xFFFFFFFF;
}
pwm_cc_update_margin_ticks = pwm_cc_margin_by_prescaler[PWM_TIMER->PRESCALER];
pwm_num_channels = config->num_channels;
for(int i = 0; i < pwm_num_channels; i++)
{
pwm_io_ch[i] = (uint32_t)config->gpio_num[i];
nrf_gpio_cfg_output(pwm_io_ch[i]);
pwm_running[i] = 0;
pwm_gpiote_channel[i] = config->gpiote_channel[i];
}
PWM_TIMER->TASKS_CLEAR = 1;
PWM_TIMER->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
PWM_TIMER->CC[2] = pwm_next_max_value = pwm_max_value;
PWM_TIMER->MODE = TIMER_MODE_MODE_Timer;
PWM_TIMER->SHORTS = TIMER_SHORTS_COMPARE2_CLEAR_Msk;
PWM_TIMER->EVENTS_COMPARE[0] = PWM_TIMER->EVENTS_COMPARE[1] = PWM_TIMER->EVENTS_COMPARE[2] = PWM_TIMER->EVENTS_COMPARE[3] = 0;
if(pwm_num_channels > 2)
{
PWM_TIMER2->TASKS_CLEAR = 1;
PWM_TIMER2->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
PWM_TIMER2->CC[2] = pwm_next_max_value = pwm_max_value;
PWM_TIMER2->MODE = TIMER_MODE_MODE_Timer;
PWM_TIMER2->SHORTS = TIMER_SHORTS_COMPARE2_CLEAR_Msk;
PWM_TIMER2->EVENTS_COMPARE[0] = PWM_TIMER2->EVENTS_COMPARE[1] = PWM_TIMER2->EVENTS_COMPARE[2] = PWM_TIMER2->EVENTS_COMPARE[3] = 0;
PWM_TIMER->PRESCALER = PWM_TIMER2->PRESCALER;
}
for(int i = 0; i < pwm_num_channels && i < 2; i++)
{
ppi_enable_channel(config->ppi_channel[i*2], &PWM_TIMER->EVENTS_COMPARE[i], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
ppi_enable_channel(config->ppi_channel[i*2+1],&PWM_TIMER->EVENTS_COMPARE[2], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
pwm_modified[i] = false;
}
for(int i = 2; i < pwm_num_channels; i++)
{
ppi_enable_channel(config->ppi_channel[i*2], &PWM_TIMER2->EVENTS_COMPARE[i-2], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
ppi_enable_channel(config->ppi_channel[i*2+1],&PWM_TIMER2->EVENTS_COMPARE[2], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
pwm_modified[i] = false;
}
#if(USE_WITH_SOFTDEVICE == 1)
sd_radio_session_open(nrf_radio_signal_callback);
#else
NVIC_SetPriority(PWM_IRQn, 0);
NVIC_EnableIRQ(PWM_IRQn);
#endif
apply_pan73_workaround(PWM_TIMER, true);
PWM_TIMER->TASKS_START = 1;
if(pwm_num_channels > 2)
{
apply_pan73_workaround(PWM_TIMER2, true);
PWM_TIMER2->TASKS_START = 1;
}
return 0;
}
void nrf_pwm_set_value(uint32_t pwm_channel, uint32_t pwm_value)
{
pwm_next_value[pwm_channel] = pwm_value;
pwm_modified[pwm_channel] = true;
#if(USE_WITH_SOFTDEVICE == 1)
nrf_radio_request_t radio_request;
radio_request.request_type = NRF_RADIO_REQ_TYPE_EARLIEST;
radio_request.params.earliest.hfclk = NRF_RADIO_HFCLK_CFG_DEFAULT;
radio_request.params.earliest.length_us = 250;
radio_request.params.earliest.priority = NRF_RADIO_PRIORITY_HIGH;
radio_request.params.earliest.timeout_us = 100000;
sd_radio_request(&radio_request);
#else
NVIC_SetPendingIRQ(PWM_IRQn);
#endif
}
void nrf_pwm_set_values(uint32_t pwm_channel_num, uint32_t *pwm_values)
{
for(int i = 0; i < pwm_channel_num; i++)
{
pwm_next_value[i] = pwm_values[i];
pwm_modified[i] = true;
}
#if(USE_WITH_SOFTDEVICE == 1)
nrf_radio_request_t radio_request;
radio_request.request_type = NRF_RADIO_REQ_TYPE_EARLIEST;
radio_request.params.earliest.hfclk = NRF_RADIO_HFCLK_CFG_DEFAULT;
radio_request.params.earliest.length_us = 250;
radio_request.params.earliest.priority = NRF_RADIO_PRIORITY_HIGH;
radio_request.params.earliest.timeout_us = 100000;
sd_radio_request(&radio_request);
#else
NVIC_SetPendingIRQ(PWM_IRQn);
#endif
}
void nrf_pwm_set_max_value(uint32_t max_value)
{
pwm_next_max_value = max_value;
}
void nrf_pwm_set_enabled(bool enabled)
{
if(enabled)
{
PWM_TIMER->TASKS_START = 1;
if(pwm_num_channels > 2) PWM_TIMER2->TASKS_START = 1;
}
else
{
PWM_TIMER->TASKS_STOP = 1;
if(pwm_num_channels > 2) PWM_TIMER2->TASKS_STOP = 1;
for(uint32_t i = 0; i < pwm_num_channels; i++)
{
nrf_gpiote_unconfig(pwm_gpiote_channel[i]);
nrf_gpio_pin_write(pwm_io_ch[i], 0);
pwm_running[i] = 0;
}
}
}
void PWM_IRQHandler(void)
{
static uint32_t i, new_capture, old_capture;
PWM_TIMER->CC[2] = pwm_max_value = pwm_next_max_value;
if(pwm_num_channels > 2) PWM_TIMER2->CC[2] = pwm_max_value;
for(i = 0; i < pwm_num_channels; i++)
{
if(pwm_modified[i])
{
pwm_modified[i] = false;
if(pwm_next_value[i] == 0)
{
nrf_gpiote_unconfig(pwm_gpiote_channel[i]);
nrf_gpio_pin_write(pwm_io_ch[i], 0);
pwm_running[i] = 0;
}
else if (pwm_next_value[i] >= pwm_max_value)
{
nrf_gpiote_unconfig(pwm_gpiote_channel[i]);
nrf_gpio_pin_write(pwm_io_ch[i], 1);
pwm_running[i] = 0;
}
else
{
if(i < 2)
{
new_capture = pwm_next_value[i];
old_capture = PWM_TIMER->CC[i];
if(!pwm_running[i])
{
nrf_gpiote_task_config(pwm_gpiote_channel[i], pwm_io_ch[i], NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH);
pwm_running[i] = 1;
PWM_TIMER->TASKS_CAPTURE[3] = 1;
if(PWM_TIMER->CC[3] > new_capture) NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
PWM_TIMER->CC[i] = new_capture;
}
else
{
while(1)
{
PWM_TIMER->TASKS_CAPTURE[3] = 1;
if(safe_margins_present(PWM_TIMER_CURRENT, old_capture) && safe_margins_present(PWM_TIMER_CURRENT, new_capture)) break;
}
if((PWM_TIMER_CURRENT >= old_capture && PWM_TIMER_CURRENT < new_capture) || (PWM_TIMER_CURRENT < old_capture && PWM_TIMER_CURRENT >= new_capture))
{
NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
}
PWM_TIMER->CC[i] = new_capture;
}
}
else
{
new_capture = pwm_next_value[i];
old_capture = PWM_TIMER2->CC[i-2];
if(!pwm_running[i])
{
nrf_gpiote_task_config(pwm_gpiote_channel[i], pwm_io_ch[i], NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH);
pwm_running[i] = 1;
PWM_TIMER2->TASKS_CAPTURE[3] = 1;
if(PWM_TIMER2->CC[3] > new_capture) NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
PWM_TIMER2->CC[i-2] = new_capture;
}
else
{
while(1)
{
PWM_TIMER2->TASKS_CAPTURE[3] = 1;
if(safe_margins_present(PWM_TIMER2_CURRENT, old_capture) && safe_margins_present(PWM_TIMER2_CURRENT, new_capture)) break;
}
if((PWM_TIMER2_CURRENT >= old_capture && PWM_TIMER2_CURRENT < new_capture) || (PWM_TIMER2_CURRENT < old_capture && PWM_TIMER2_CURRENT >= new_capture))
{
NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
}
PWM_TIMER2->CC[i-2] = new_capture;
}
}
}
}
}
}
main.c
#include
#include
#include "nrf.h"
#include "nrf_gpio.h"
#include "nrf_delay.h"
#include "nrf_pwm.h"
#include "boards.h"
#define FREQ_HALF_NOTE_FACTOR 1.059463f
nrf_pwm_config_t pwm_config = PWM_DEFAULT_CONFIG;
void pwm_init(nrf_pwm_mode_t nrf_pwm_mode)
{
pwm_config.mode = nrf_pwm_mode;
// Initialize the PWM library
nrf_pwm_init(&pwm_config);
nrf_delay_ms(300);
}
int main(void)
{
pwm_config.num_channels = 1;
pwm_config.gpio_num[0] = 7;
// Start the external 16 MHz clock for a more accurate PWM frequency
NRF_CLOCK->TASKS_HFCLKSTART = 1;
//pwm_init(PWM_MODE_C);
while (true)
{
pwm_init(PWM_MODE_C);
pwm_init(PWM_MODE_D);
pwm_init(PWM_MODE_E);
pwm_init(PWM_MODE_F);
pwm_init(PWM_MODE_G);
pwm_init(PWM_MODE_A);
pwm_init(PWM_MODE_B);
}
}
仿真一下发现,出现的波形前后只会有占空比的不同,频率是相同的。。这里为了方便看 用了四个通道
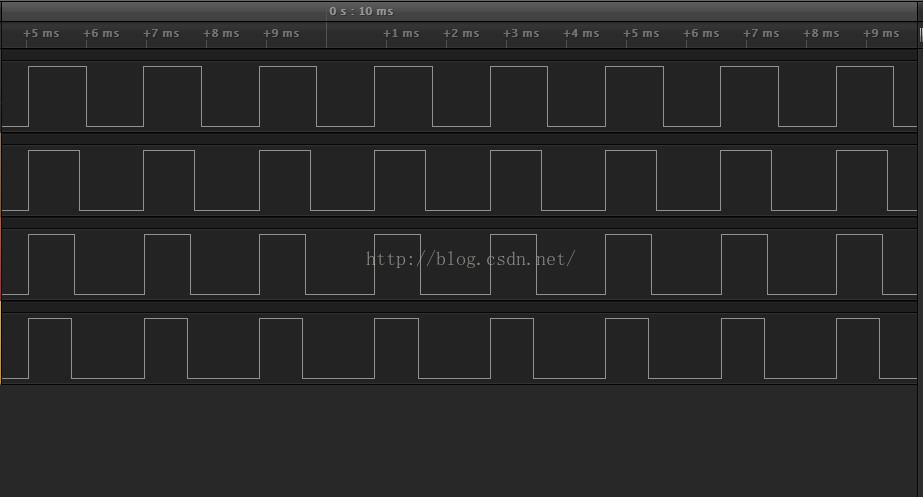
若把分频改成-->5,则之后出现的波形频率都是5分频,更改最大值的话 则还是依从配置的所有最大值里最大的一个……出波形……很神奇
(二)频率可调的pwm控制蜂鸣器发出乐音
#include
#include
#include "nrf.h"
#include "nrf_assert.h"
#include "nrf_gpiote.h"
#include "nrf_gpio.h"
#include "boards.h"
#include "nrf_delay.h"
#define PWM_OUTPUT_PIN_NUMBER 7 /**< Pin number for PWM output. */
unsigned long MAX_SAMPLE_LEVELS = 1923; /**< Maximum number of sample levels. */
#define TIMER_PRESCALERS 4U /**< Prescaler setting for timer. */
/** @brief Function for getting the next sample.
* @return sample_value computed sample.
*/
static __INLINE uint32_t next_sample_get(void)
{
static uint32_t sample_value = 8;
// Read button input.
sample_value = (~NRF_GPIO->IN & 0x000000FFUL);
// This is to avoid having two CC events happen at the same time,
// CC1 will always create an event on 0 so CC0 and CC2 should not.
if (sample_value == 0)
{
sample_value = 8;
}
return (uint32_t)sample_value;
}
/** @brief Function for handling timer 2 peripheral interrupts.
*/
void TIMER2_IRQHandler(void)
{
static bool cc0_turn = false; /**< Keeps track of which CC register to be used. */
if ((NRF_TIMER2->EVENTS_COMPARE[1] != 0) &&
((NRF_TIMER2->INTENSET & TIMER_INTENSET_COMPARE1_Msk) != 0))
{
// Sets the next CC1 value
NRF_TIMER2->EVENTS_COMPARE[1] = 0;
NRF_TIMER2->CC[1] = (NRF_TIMER2->CC[1] + MAX_SAMPLE_LEVELS);
// Every other interrupt CC0 and CC2 will be set to their next values.
uint32_t next_sample = next_sample_get();
if (cc0_turn)
{
NRF_TIMER2->CC[0] = NRF_TIMER2->CC[1] + MAX_SAMPLE_LEVELS*0.5; //duty
}
else
{
NRF_TIMER2->CC[2] = NRF_TIMER2->CC[1] + MAX_SAMPLE_LEVELS*0.5; //duty
}
// Next turn the other CC will get its value.
cc0_turn = !cc0_turn;
}
}
/** @brief Function for initializing the Timer 2 peripheral.
*/
static void timer2_init(void)
{
// Start 16 MHz crystal oscillator .
NRF_CLOCK->EVENTS_HFCLKSTARTED = 0;
NRF_CLOCK->TASKS_HFCLKSTART = 1;
// Wait for the external oscillator to start up.
while (NRF_CLOCK->EVENTS_HFCLKSTARTED == 0)
{
//Do nothing.
}
NRF_TIMER2->MODE = TIMER_MODE_MODE_Timer;
NRF_TIMER2->BITMODE = TIMER_BITMODE_BITMODE_16Bit << TIMER_BITMODE_BITMODE_Pos;
NRF_TIMER2->PRESCALER = TIMER_PRESCALERS;
// Clears the timer, sets it to 0.
NRF_TIMER2->TASKS_CLEAR = 1;
// Load the initial values to TIMER2 CC registers.
NRF_TIMER2->CC[0] = MAX_SAMPLE_LEVELS + next_sample_get();
NRF_TIMER2->CC[1] = MAX_SAMPLE_LEVELS;
// CC2 will be set on the first CC1 interrupt.
NRF_TIMER2->CC[2] = 0;
// Interrupt setup.
NRF_TIMER2->INTENSET = (TIMER_INTENSET_COMPARE1_Enabled << TIMER_INTENSET_COMPARE1_Pos);
}
/** @brief Function for initializing the GPIO Tasks/Events peripheral.
*/
static void gpiote_init(void)
{
// Connect GPIO input buffers and configure PWM_OUTPUT_PIN_NUMBER as an output.
nrf_gpio_range_cfg_input(BUTTON_START, BUTTON_STOP, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_output(PWM_OUTPUT_PIN_NUMBER);
NRF_GPIO->OUT = 0x00000000UL;
// Configure GPIOTE channel 0 to toggle the PWM pin state
// @note Only one GPIOTE task can be connected to an output pin.
nrf_gpiote_task_config(0, PWM_OUTPUT_PIN_NUMBER, \
NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_LOW);
}
/** @brief Function for initializing the Programmable Peripheral Interconnect peripheral.
*/
static void ppi_init(void)
{
// Configure PPI channel 0 to toggle PWM_OUTPUT_PIN on every TIMER2 COMPARE[0] match.
NRF_PPI->CH[0].EEP = (uint32_t)&NRF_TIMER2->EVENTS_COMPARE[0];
NRF_PPI->CH[0].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[0];
// Configure PPI channel 1 to toggle PWM_OUTPUT_PIN on every TIMER2 COMPARE[1] match.
NRF_PPI->CH[1].EEP = (uint32_t)&NRF_TIMER2->EVENTS_COMPARE[1];
NRF_PPI->CH[1].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[0];
// Configure PPI channel 1 to toggle PWM_OUTPUT_PIN on every TIMER2 COMPARE[2] match.
NRF_PPI->CH[2].EEP = (uint32_t)&NRF_TIMER2->EVENTS_COMPARE[2];
NRF_PPI->CH[2].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[0];
// Enable PPI channels 0-2.
NRF_PPI->CHEN = (PPI_CHEN_CH0_Enabled << PPI_CHEN_CH0_Pos)
| (PPI_CHEN_CH1_Enabled << PPI_CHEN_CH1_Pos)
| (PPI_CHEN_CH2_Enabled << PPI_CHEN_CH2_Pos);
}
/**
* @brief Function for application main entry.
*/
int main(void)
{
gpiote_init();
ppi_init();
timer2_init();
// Enabling constant latency as indicated by PAN 11 "HFCLK: Base current with HFCLK
// running is too high" found at Product Anomaly document found at
// https://www.nordicsemi.com/eng/Products/Bluetooth-R-low-energy/nRF51822/#Downloads
//
// @note This example does not go to low power mode therefore constant latency is not needed.
// However this setting will ensure correct behaviour when routing TIMER events through
// PPI (shown in this example) and low power mode simultaneously.
NRF_POWER->TASKS_CONSTLAT = 1;
// Enable interrupt on Timer 2.
NVIC_EnableIRQ(TIMER2_IRQn);
__enable_irq();
// Start the timer.
NRF_TIMER2->TASKS_START = 1;
while (true)
{
MAX_SAMPLE_LEVELS = 1923;
nrf_delay_ms(200);
MAX_SAMPLE_LEVELS = 1709;
nrf_delay_ms(200);
MAX_SAMPLE_LEVELS = 1538;
nrf_delay_ms(200);
MAX_SAMPLE_LEVELS = 1443;
nrf_delay_ms(200);
MAX_SAMPLE_LEVELS = 1282;
nrf_delay_ms(200);
MAX_SAMPLE_LEVELS = 1153;
nrf_delay_ms(200);
MAX_SAMPLE_LEVELS = 1026;
nrf_delay_ms(200);
}
}